多种近景测量方法在石窟寺调查中的应用
2022-02-22 08:34:20王炳新
北京测绘 2022年1期
王炳新
(辽宁省有色地质一○一队有限责任公司, 辽宁 抚顺 113006)
0 引言
佛像石窟是我国重要的文物类型,具有极其重要的历史、文化、艺术和社会价值。石窟是一种不可移动文物,且一般处于野外地区,容易受人为破坏和自然环境日积月累地侵蚀[1],佛像保护在技术层面难度较大。佛像本体结构较为复杂,传统的测量手段无法很好地测量佛体三维结构及整体数据,常规佛体立面图测绘采用近景照片结合手工绘图的方法,传统方法耗时耗力,且手工绘图手段不能满足现代信息化时代的要求。为了更好地保护石窟佛像等类似文物,研究非接触性的近景测量手段十分有必要,在不接触佛体或文物的情况下,能采集到文物的三维数据,有效保护文物本体。
本文以辽宁省石窟寺调查文物保护项目为导向,研究采用多种近景测量技术手段对石窟进行二维表面与三维立体数据采集,近景测量手段包括无人机近景摄影测量、三维激光扫描等。外业测量作业可根据佛窟寺的作业环境、作业区域大小、佛窟立面物体的结构复杂程度等因素可选择不同的仪器和测量技术进行立面测绘[2]。
国内外已有许多学者对近景测量手段展开过深入研究。刘洋等[3]采用无人机近景摄影测量技术采集古建筑物的三维立体数据,在航拍关键技术方面,论述了多角度航拍,达到影像多点重叠,从而有利于精细古建筑物的三维模型。李婉[4]将地面三维激光扫描技术应用于建筑物立面体测量,提取古建筑物二维表面坐标成果,成果几何精度达到厘米级别。蔡占玲[5]在大同古城精细三维建模技术研究中采用了空地结合的技术手段,有效解决了三维模型在高空与地面数据相互融合困难问题,以及解决了受高度盲区的影响造成模型拉花、模糊、漏洞等现象。
1 多种近景测量手段简述
随着无人机设备的飞速发展,无人机近景摄影技术也被广泛应用于立面图测绘采集方面,它具备作业效率高、全方位、低成本等优势,无人机可从多角度获取目标影像,利用专业软件进行空三加密处理和三维模型重建[6]。
数码相机近景摄影测量技术是对物体进行多角度拍摄,通过计算机自动完成空中三角测量,并解析原始影像的内方位元素,再建立物体精密三维模型[7],通过拍摄影像获得物体的纹理信息和细节构造等,基于三维模型获得目标物的立面信息。
三维激光扫描是全自动高精度的测绘手段,能够大面积、高分辨率地获取三维几何信息和纹理信息[8]。其作业流程是利用踏勘、数据采集、数据处理、成果输出[9-10]等手段,获得三维实景模型,将模型进行数据切割,获取所需要的立面、平面等信息。综上所述,分析多种近景测量技术手段在石窟寺调查应用中的优缺点,如表1所示。

表1 多种近景测量技术对比表
基于辽宁省石窟寺调查项目,对3种方法的应用场景分析,在不同的外界环境采用不同的作业方法,减少了人力和物力的投入。例如对于体积大的文物采用无人机环绕飞行方式,拍摄文物的全方位数据,大大提高了工作效率,而数码相机和三维激光扫描仪就无法一测站采集大体积文物的全方位数据。又如,在密集室内文物区域中,采用数码相机结合三维激光扫描仪器的方式能很好地测量文物数据,有效保证文物测量的精度。综上3种方法有着不同的应用优势和劣势,针对不同环境结合不同的采集方式能有效提高文物采集效率和精度。
2 无人机近景摄影测量
根据全国石窟寺专项调查工作的实施方案制定测绘技术方案[11],立面图成果制作主要步骤有实地踏勘、飞行作业、数据传输、数据处理、产品生产、数据成果质量检查等,由于大疆在航拍过程中可以获取高精度定位定姿系统(Position and Orientation System,POS)数据,无须布设像控点。无人机近景摄影测量流程如图1所示。

图1 无人机摄影流程图
2.1 无人机设备
本项目采用大疆精灵4RTK无人机,精灵4RTK差分模块的优异的定位精度保证了无人机在航测时数据的准确性,其卫星定位模块的参数见表2。

表2 卫星定位模块参数表
2.2 外业飞行作业
由于石窟寺与摩崖造像基本位于山体斜坡上,受地形与环境等因素影响,不宜规划航线进行环绕飞行,只能采用手动飞行模型进行摄影测量,手动模式拍摄时,需要注意的保证相邻拍摄照片有60%的重叠度,尤其是文物边缘,尽量保证相机角度水平和高重叠度,尽量保持相机到文物的距离差不要过大。
飞行过程中关注外界环境风力、信号强度、电池电量等因素,如遇紧急情况应立即返航。在采集数据时,若室外光线不均匀,无法准确对焦,可能造成文物本体拍摄不清晰,尽量避免天气条件不好的情况下作业。
2.3 数据处理
数据处理环节主要包括影像检查、空中三角及数据产品加工。
首先是对所拍摄的立面照片逐一检查,将模糊、拉花的影像数据删除,由于外业采集照片自带定位定姿系统(Position and Orientation System, POS)数据,可将照片直接导入Context Capture软件中,提交空中三角测量,空三结束后,在3D视图窗口进行检查,主要检查是否有明显的分层或交叉现象[12],同时也要检查是否包含测区范围是否完整,是否有漏洞。若有遗漏部分需要现场补拍或重拍相应区域数据。3D视图对空三检查过后,进行软件参数设置,如坐标系统的选择、模型区域范围的定义、瓦片大小的设置、瓦片分割方式的选择等。参数设置结束进行产品生产加工,本工程输出.obj数据格式。若输出数据成果出现变形等问题,应及时检查原始数据、处理过程等是否出问题。
2.4 立面图成果输出
立面成果图输出采用3Dreshaper软件进行模型处理加工,首先将.obj数据瓦片加载到软件中,对处理好的模型进行坐标系定义,调整视图,导出立面正射影像,如图2(a)所示,将正射影像插入到AutoCAD软件中进行立面图描绘,立面线划图如图2(b)所示。

(a)正射图
2.5 成果质量检查与分析
通过外业采集的特征点(本文特征点均在铅锤方向文物上选取)间距离与模型量距尺寸和立面线化图尺寸,分别进行比对分析,如表3所示。

表3 无人机近景摄影外业检查表
通过比较实地钢尺量距尺寸与模型量取尺寸和立面图尺寸,本次模型量取尺寸和实地检查特征点较差差值均在3 cm左右,满足《石窟寺文物三维激光扫描数字化采集规程》中对于立面精度的要求。本项目作业无人机作业过程中符合《无人机航拍安全作业基本要求》(CH/Z 3001—2010)[13]和《低空数字航空摄影测量规范》(CH/Z 3005—2010)[14]中的相关要求。
3 数码相机近景摄影测量
数码相机近景摄影测量在辽宁省石窟寺调查中立面图成果制作的主要流程有以下几个方面:控制测量、近景拍摄作业、数据处理、成果输出、立面图制作等。
3.1 仪器设备
本项目采用非测量数码相机佳能6D MarkII。其参数如表4所示。

表4 数码相机参数表
3.2 现场作业
首先作业前检校数码相机[15],布设像控点标示,每个文物本体上至少布设3个像控点。为了获取高清晰的影像数据,采用云台搭载相机,确保相机拍摄时平稳,每次拍摄时调整聚焦点,保证每张像片的清晰度。
3.3 数据处理
三维模型数据处理同样选择Context Capture软件,与无人机数据处理不同的是,由于数码相机不能获取位置信息,所以在空中三角测量结束后,需要设置2个以上的连接点作为尺寸约束条件,然后进行产品生产加工,数据输出格式.obj。
3.4 立面图输出与精度检验
通过Context Capture软件自动解算,输出文物的立面正射图,将正射影像插入到AutoCAD软件中进行立面图描绘,立面线划如图3(b)所示。

(a)正射图
数码相机精度验证方式和无人机航摄方式相同,本次模型量取尺寸和立面线化图尺寸与实地钢尺量距尺寸较差情况如表5所示。由表5可知,数码相机精度约在2 cm左右。在数码相机进行近景拍摄过程中符合《近景摄影测量规范》(GB/T 12979—2008)[16]中相关要求。

表5 数码相机近景摄影外业检查表
4 三维激光扫描
三维激光扫描测量在辽宁省石窟寺调查中立面图成果制作的主要流程有野外踏勘、数据采集、数据处理、立面产品加工等,三维激光扫描测量具体流程如图4所示。

图4 三维扫描仪的流程图
4.1 仪器设备
在石窟寺调查中,用采用是Faro focus S350三维激光扫描仪,仪器参数如表6所示。

表6 三维扫描仪参数表
4.2 现场作业
Faro focus S350这款三维激光扫描仪操作简单,在作业过程中注意以下几点。
(1)布设标靶时放在合适位置并固定,保证两站扫描至少有4个公共标靶。
(2)把扫描仪安置在合适位置,确保标靶都能被扫描仪扫到。
(3)按站进行数据扫描,确保标靶扫描完整、清晰。
4.3 数据处理
用仪器自带的scene软件进行数据拼接处理,导出拼接好的三维模型,数据格式为.e57。将点云数据加载到3Dreshaper软件中对点云冗余数据进行过滤、抽稀[17]。
4.4 立面图输出
立面成果图输出采用3Dreshaper软件进行模型处理加工,将.e57数据瓦片加载到软件中,软件解算点云数据,将正射影像插入到AutoCAD软件中进行立面图描绘,完成立面线划图如图5所示。

(a)正射图
精度验证方式与无人机航摄方式相同,通过外业采集的特征点尺寸与模型量距尺寸和立面线划图进行比对分析,由表7可知,本次三维激光扫描精度可达到1 cm级别。本次三维激光扫描仪精度符合地面《三维激光扫描作业技术规程》(CHZ3017—2015)中相关要求[18]。
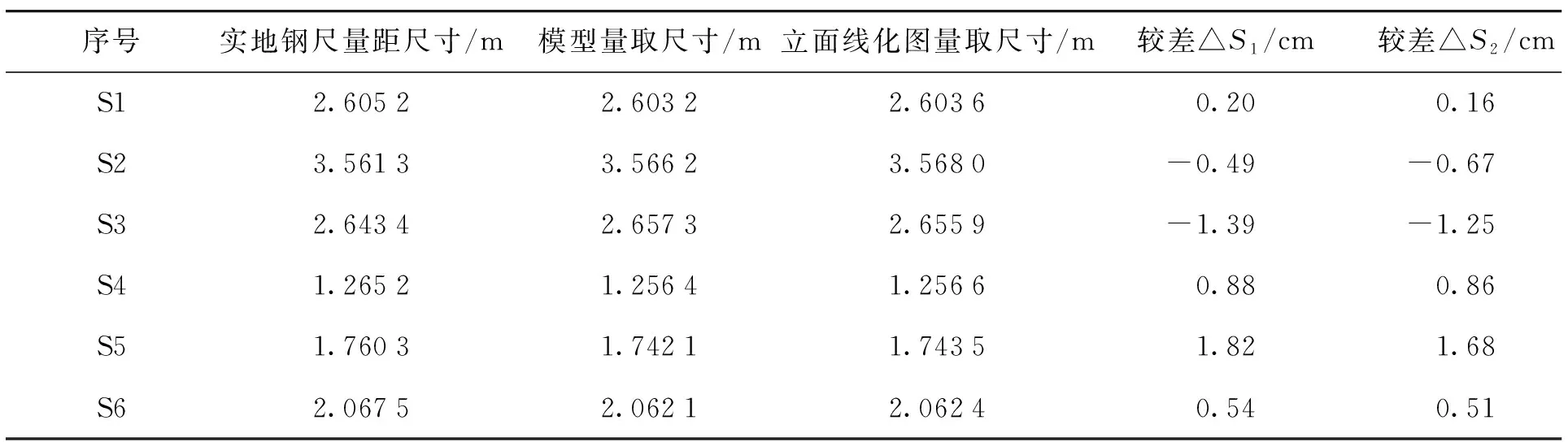
表7 三维扫描外业检查表
5 结束语
本文主要是依托石窟寺调查项目介绍了无人机、数码相机、三维扫描等多种近景测量手段在文物立面图的主要作业流程,从数据采集到数据处理到分析出成果,已经形成一套完整的作业工作模式。同时也验证了3种作业方法的精度均满足相关规范的要求。辽宁省石窟寺调查测绘项目经过自检、互检、专检的检查过程,各项指标、精度检查满足规范要求后,提交准确合格的测绘成果。同时本文也验证了不同的作业环境选择不同的作业方法对作业时间有着明显的差异,大大提高了生产效率。不足之处在于,室外光线不均、拍摄的过程中有树木阴影等外界干扰因素无法解决。
猜你喜欢
科学(2022年4期)2022-10-25 02:43:50
中国特种设备安全(2021年5期)2021-11-06 05:09:28
青年文学家(2021年15期)2021-07-19 02:40:48
青年文学家(2021年1期)2021-03-24 21:12:54
数字技术与应用(2020年1期)2020-04-21 07:40:59
大社会(2020年10期)2020-02-21 01:37:52
西夏学(2018年2期)2018-05-15 11:27:18
丝路艺术(2017年6期)2017-04-18 13:59:08
西夏学(2016年2期)2016-10-26 02:22:40
黑龙江科学(2016年5期)2016-03-24 10:32:23