基于离散模型的协同合作智能控制装置的可行性研究
2022-02-21 02:25:34王德志WANGDezhi李瑜LIYu
价值工程 2022年5期
王德志 WANG De-zhi;李瑜 LI Yu
(包头职业技术学院,包头014030)
0 引言
进入本世纪以来,伴随者现代自动控制技术的高速发展,离散模型智能控制系统已经逐渐发展成现代科学技术主要研究的内容之一,离散模型智能控制系统已经在我们的日常生活、工业中有着越来越广泛的应用,尤其是电力系统智能控制领域,众所周知电力系统在民用、工业上占有者举足轻重的地位,所以电力系统智能化自动控制的主要研究内容之一就是对多个电力系统控制装置、多个自动控制系统之的协作和对多智能控制的研究。
1 离散模型的协同合作智能控制装置国内外研究现状及趋势
1.1 智能控制与传统控制区别
智能控制就是指不需要人的直接干预能够独立自主的驱动智能控制器或智能设备实现控制目标的一种自动控制方式,智能控制式基于人工智能、控制理论、运筹学和信息论等诸多学科建立起来的,智能控制是基于传统的控制方式发展起来的,智能控制主要是解决应用传统控制方式不能解决的复杂大系统的控制。智能控制针对传统的控制方式是不需要确定被控对象和干扰的模型的,传统的控制方式认定被控对象的模型必须是已知的或者是经过辨识是可以得到的。传统的控制理论往往是针对线性系统进行研究的,虽然对一些非线性的控制对象有着可以应用的控制方法,但总的来说传统控制理论往往对非线性控制系统的控制结果不够理想,而智能控制是专门针对复杂的非线性的控制对象提出来的。传统的控制系统,一般要求对控制任务和要求的输出是一个恒定的值,因此传统的控制理论对控制任务要求比较简单和单一的系统控制效果较好,但传统控制系统对系统比较复杂或者控制任务比较繁琐往往控制效果较差,采用智能控制方法可以解决或者满足复杂的任务要求。智能控制相对于传统控制理论而言有着混合控制的特点,控制系统能根据知识来表示非数学的广义模型和数学表示的混合控制过程,并且有补偿和自我修复的能力,并且智能控制具有判断决策的能力,具有极高的可靠性。
智能控制主要解决传统控制方法解决不了的问题,一个智能控制系统具有学习能力,智能控制系统对一个系统的进行识别、记忆和学习,并能够积累经验对自己本身性能进一步进行改善,一个智能控制系统还应该具有适应能力,可以适应控制对象的变化这种变化包括对象的动力学特性变化、系统环境变化和系统运行条件的变化,一个智能控制系统还具有组织功能,根据复杂任务和各个分散的信息具有组织和协调的功能,智能控制使控制系统有了自行决策和组织的能力,智能系统还要具有在线实时响应能力,保证各个系统协同工作。
1.2 智能控制主要方法
1.2.1 模糊控制
所谓的模糊控制就是基于人的控制经验实现对系统的一种控制方法,模糊控制是不需要对被控对象进行建模的,这种控制方法用来解决不确定系统一种有效的方法。模糊控制的控制器结构如图1 所示。

图1 模糊控制器一般结构
1.2.2 神经网络控制
神经网络控制部分的能表达出和部分人脑的的功能,神经网络控制从人处理信息机制的角度建立了控制模型,虽然神经网络控制模拟了人的某些处理信息的功能,但和人的神经网络的信息处理部分还有着较大的区别。
1.2.3 专家控制
专家控制就是在模拟人的思维活动的规律,这种控制方式能够进行推理,适应变化,具有一定程度的灵活性,相对经典的控制方法,它可以对复杂的系统进行故障诊断,控制算法和参数可以根据实际情况进行组合和改变。专家控制的结构如图2 所示。
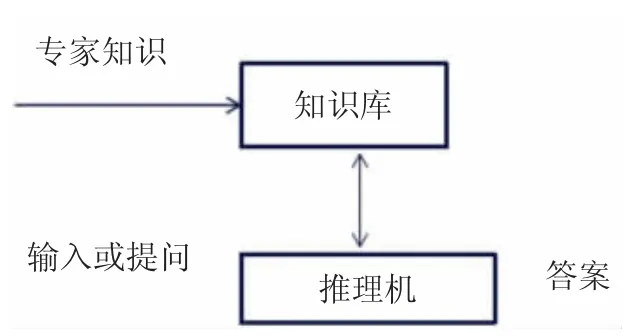
图2 专家系统简化结构图
专家控制分为直接专家控制和间接专家控制,具体如图 3、图 4 所示。
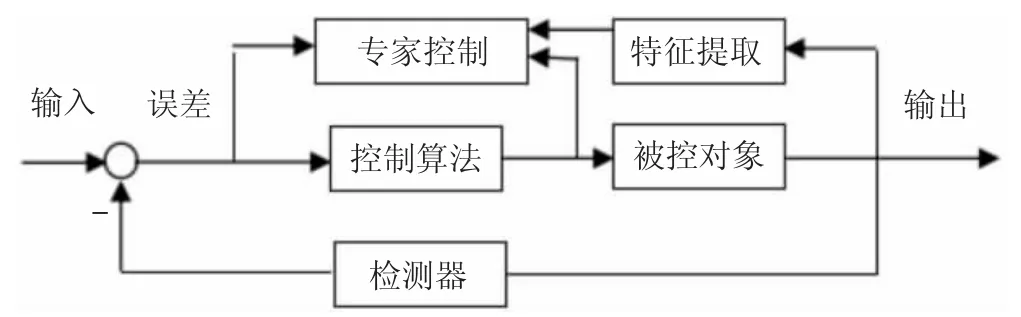
图3 间接专家控制系统框图

图4 直接接专家控制系统框图
1.3 智能控制在国外发展现状
随着智能控制应用发展的日益成熟,智能控制广泛应用于多个领域,生产过程中的局部级的智能控制将引入工艺过程中的莫伊单元进行控制器设计,全局级的智能控制主要针对整个操作工艺的控制,过程的故障诊断、规划过程操作处理异常等,在机械制造行业中,智能控制利用模糊、神经网络的方法对制造过程进行动态环境建模,利用传感器融合技术来进行信息的预处理和综合。电力系统中发电机、变压器、电动机等电机电器设化设计、故障诊断及控制中,取得了良好的控制效果。1958 年,美国麻省理工学院怀特克教授首先提出飞机自动驾驶仪的模型智能控制方案,智能控制理论取得较大进展。近些年来,由于计算机的迅速发展,特别是微处理器件的广泛普及,为智能控制技术的实际应用创造了有利条件。1974 年,吉尔巴特和温斯顿最早应用智能控制,在24 英寸的光学跟踪望远镜上利用智能控制技术,提高了跟踪精度。Courtial 和Landau将智能控制技术应用于电力领域,对晶闸管供电直流电力拖动系统进行智能控制,将智能控制的应用推向新阶段。
1.4 智能控制在国内发展现状
在我国电力系统的范围的分布是非常广泛的,电力系统本身是比较典型的动态巨维数系统,这个系统具有时变性、非线性的特点,而且在控制过程中系统参数不确定,含有很多并没有进行建模的动态的部分,在组成电力系统的元件都具有磁滞、延迟、饱和的物理特性,对与具有以上特点的系统进行控制是十分困难的,而且近些年来,电力电子装备在我国电网中应用日益广泛,电源电网和负荷的格局发生了深刻变化,大规模新能等电力电子装备的广泛接入,致使电网的不确定性和脆弱性日益突出,特高压直流输电工程的不断搬运,导致交直流、上下级电网减的耦合日趋紧密,电网复杂程度显著增加。近些年来,电网的规模在不断的扩大,我国的电力企业我国科研人员对电力系统自动化智能控制等展开了研究。目前,电力技术已经进入智能控制,可以在线实现运行规则的调整,通过将智能控制理论引入电力系统,探讨具体的操作流程,实现更为精确的控制,满足电力设备的需求。
另外,随着智能化技术在发展过程中逐渐成熟,为了对智能电网进行科学智能控制,需要对智能控制技术进行深入研究,故本课题将智能控制理论引入智能电网中,推动电力系统的转型升级,建立智能化的控制系统,既有助于提高电力系统的可靠性和稳定性,也减少电力事故的发生,保障电力行业的安全。
1.5 智能控制在我国电力系统中发展趋势
智能控制有四种控制方法即ANN、模糊控制、专家系统和启发式搜索,这几种控制方式各有优点和缺点,每个控制方法都能在某个方面和程度上提高电力系统的自动化的性能,但是往往会在电力系统控制设计或者控制动态过程中不能解决或满足所有的问题和要求。即使得到可行解也是和最优解相差太多,即使用神经网络的控制方法对可行解的质量进行精化,得到的组合的最优解,也不能解决组合爆炸问题和大规模的问题,专家系统与模糊理论结合的应用研究,还有其他组合研究方式也很多,目前综合智能控制在电力系统的研究才开始,随着研究的进一步发展和深入,各种智能控制方法的联系会更加紧密,各种控制方法利用本身的各自的优势而组成的综合智能控制系统也会在电力系统中起到越来越重要的作用。
2 离散模型的协同合作智能控制装置的实际意义和理论意义
在电力系统智能控制技术应用背景下,如何对电力系统实现高效和先进智能控制是当前主要研究方向。当前,我国还没有应用案例,相关的文献也不多见。因此,研究非常有理论和现实意义。离散模型的协同合作智能控制装置从智能控制角度研究电力系统自动化智能控制系统,将离散模型和智能控制理论应用于电力系统自动化智能控制,这在智能控制技术在过程控制领域中的应用广泛,但在运动控制领域还有待进一步研究,是智能控制技术在运动控制领域的具体应用及实现。通过研发基于离散模型的协同合作智能控制装置,有助于提高电力系统自动化智能控制系统的安全性与稳定性,更好地满足社会的需求,具有重要的理论意义和实际意义。
3 离散模型的协同合作智能控制装置的研究内容与方案
3.1 离散模型的协同合作智能控制装置研究内容
①搜集并阅读与智能控制理论等相关的杂志期刊、学术论文等文献资料,全面把握国内外研究现状与趋势,储备相关理论依据,对智能控制理论的概念、组成要素、各要素之间的关系及主要功能进行基本概述,为本课题的研究奠定厚实的理论基础。
②分析电力系统自动化智能控制系统的组成、工作原理,根据实验系统参数建立系统基于离散模型的数学模型,作为电力系统自动化智能控制系统设计的基础。通过讨论基于离散模型的协同合作智能控制装置的设计要点,进行协同合作智能控制装置结构设计和参数选择,进一步调整关于电力系统自动化智能控制系统的数学模型。
③针对电力系统自动化智能控制系统存在的不足,使用离散模型与智能控制方法,得到电力系统自动化智能控制系统,并建立其数学模型,设计基于离散模型的协同合作智能控制装置。
④为了验证控制系统的科学性,使用MATLAB 中的SIMULINK 对智能控制系统进行仿真实验研究。将设计的模型与被控对象的输出曲线进行比较,验证在采用协同合作智能控制装置之后,被控对象输出曲线是否能够较好的跟踪参考模型。基于仿真实验,研究证明方案设计是否正确,控制效果是否良好。
⑤在理论设计和仿真研究正确的基础上,设计电力系统自动化智能控制系统的硬件电路和软件程序。将电力系统自动化智能控制系统应用于协同合作智能控制装置实验系统,实验研究证明离散模型与智能控制系统设计的性能。
3.2 离散模型的协同合作智能控制装置研究方案
①文献分析法。
搜集并阅读与智能控制理论等相关的文献资料,全面把握国内外研究现状与趋势,储备相关理论依据,为本课题的研究奠定厚实的理论基础。
②经验总结法。
通过收集、整理基于离散模型的协同合作智能控制装置的项目,有针对性地对基于离散模型的协同合作智能控制装置设计的技术要点进行研究。
③对比分析法。
在研究时,综合对比分析国内外基于离散模型的协同合作智能控制装置设计要点。探索适合我国的电力系统自动化智能控制系统设计路径。进而,研发电力系统自动化智能控制系统,构建协同合作智能控制装置。具体的研究方案如图5 所示。
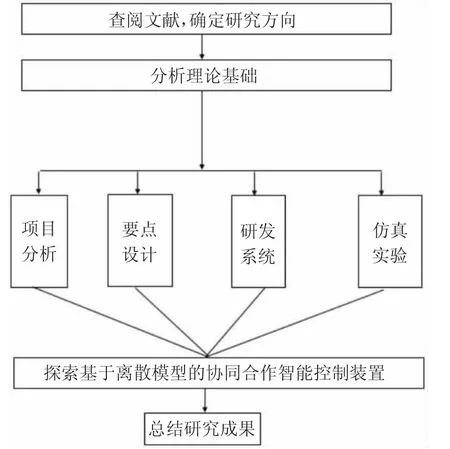
图5 离散模型的协同合作智能控制装置研究方法
我们大家所熟悉的大的控制系统和多个智能控制系统它们之间既有相同点也有不同点,它们之间的共同点就是,不管是大系统还是多智能系统都是通过建模来进行控制的,通过对核心控制器的设计,一个多智能控制系统是可以形成一个大系统的,根据以前的经验,我们控制一个大系统的时候,通常是采用分散控制的控制方法,分散控制就是控制功能分散,而管理是集中的,这种控制方式的优点是可靠性高,及时在系统运行时部分系统有故障,也不会影响到全局,各个子系统仍可以进行独立的控制,子系统由于信息量的相对大系统来说是减少的,这就使子系统的编程相对简单、修改起来也很方便呢,但是这种控制方式的缺点就是,各个子系统中需要整体的协调合作,在集中管理起来有困难,而且也容易造成现场的信息采集不完整,这些缺点就要求我们在每个离散的小系统中,在多个控制器之间要进行信息交流和协同合作共同形成一个稳定的大系统。对多个控制器进行智能协调控制和合作来解决这个问题,在协调控制中,不稳定的智能体最终需要渐进稳定于零点,而在一致性问题中,智能体最终需要渐进稳定于一个任意期望的数值。因此,我们应该把多智能体的协调控制问题和一致性问题归纳成为一类问题来解释。
在多智能系统的一致性研究起源于上个世纪七十年代,而且在各个应用领域受到了高度重视和广泛的研究,涉及到的学科领域不仅有控制理论方面的,后来又有矩阵论、代数图论等多个方面,根据在以往的分散控制系统的经验中,首先我们先假设每一个子系统都是可以控制的,甚至我们假设每个子系统都是稳定的,或者我们认为通过每个子系统之间的信息都能通过反馈进行通讯,在这个控制的前提下,我们必须通过多个控制器的智能协作形成大系统,所以智能协作的作用是极其重要的,是必须具有的,智能协作尤其是在电力系统中起着非常重要的作用,因此在电力系统中每个小电站都需要互相协调来构成整个电网,这是典型的系统协调作用的应用。
随着控制理论和计算机技术不断发展和完善,离散形式的智能控制系统应用也愈来愈广泛,对于离散多智能系统,由于离散系统相对于连续系统有着更广泛的应用,逐渐用它来解决工程实际问题。但是由于较强的假设条件在工程上有时很难满足,所以目前的应用还有限。
基于离散模型的协同合作智能控制装置能够较好地改善传统电力系统存在的不足,全面运用当前电力电子控制技术、自动化控制技术以及网络通信控制技术等,实现电力系统的远程监控、智能控制等,进而实现现代电力系统的各式各样需求。本文致力于提出针对基于离散模型的协同合作智能控制装置设计方法,以及安全稳定控制策略,具有重要的理论意义和工程实用价值。
猜你喜欢
科学大众(2020年23期)2021-01-18 03:09:08
建材发展导向(2019年13期)2019-08-24 06:37:40
电子制作(2019年7期)2019-04-25 13:16:50
汽车观察(2019年2期)2019-03-15 06:00:50
石油石化绿色低碳(2019年6期)2019-01-14 01:16:24
Coco薇(2017年10期)2017-10-12 19:43:59
中国卫生(2016年5期)2016-11-12 13:25:26
照明工程学报(2016年3期)2016-06-01 12:17:56
电测与仪表(2016年17期)2016-04-11 12:39:38
新疆钢铁(2016年3期)2016-02-28 19:18:55