基于智能巡检装置的设备状态指示灯监测研究
2022-02-21 02:25:38吴兰WULan贾恒杰JIAHengjie胡玉婷HUYuting凌飞LINGFei王浩WANGHao
价值工程 2022年5期
吴兰 WU Lan;贾恒杰 JIA Heng-jie;胡玉婷 HU Yu-ting;凌飞 LING Fei;王浩 WANG Hao
(广东电网有限责任公司韶关供电局,韶关512026)
0 引言
随着电网规模的增大、电压等级的提高,对供电安全可靠性要求也更加严格,变电站是电网的基础节点,只有保证其稳定运行,才能确保电力系统安全运行,因此变电站正常运行是保障电力系统供电安全的重要环节[1]。变电站的室内设备如果都采用人工巡检,会浪费很多人力又存在安全隐患,而对于一些恶劣环境场合,还可能对巡检人员的人身安全造成危害[2-3],有必要改进当前的人工巡检模式,提高变电站的运维水平。
近年来,采用无人智能装备巡检代替人工巡检模式已成为变电站巡检发展的热点方向[4]。将图像识别技术部署在智能装备内,可以实现实时信号指示灯状态检测识别。
1 行业现状
目前变电站使用的机器人巡检主要分为有轨和无轨两种。有轨机器人需要预先敷设磁条并安装RFID 定位芯片,用于机器人进行导航和定位[5],前期工程量较大,同时磁条和RFID 定位芯片的损坏将造成机器人无法正常执行任务。无轨机器人导航无需磁条,依靠智能识别技术,巡检路线的选择上局限性较小,但是巡检精度易受外界影响,容易识别出错。随着智能驾驶技术的发展,循迹无人小车通过黑白线循迹,在设置好的跑道上移动,既避免了有轨机器人需要大规模铺设磁条,也可避免无轨机器人精度易受外界影响的缺点,可在变电站巡检中大规模应用。
变电站所处的环境大多较复杂,智能设备采集的图像受环境、光线或者拍摄角度的影响容易造成对状态指示灯的识别差错。因此,本文提出在设备指示灯旁粘贴关联的AprilTag 标签[6-7],图像采集设备通过识别AprilTag 标签定位设备指示灯位置,完成指示灯状态图像采集识别,通过对设备状态指示灯的监测完成变电站巡检。
2 智能巡检装置系统主要研究内容
本论文主要研究内容为包括变电站室内环境里的无人巡检小车自主影像采集以及后续的影像自主识别等功能应用,建立一套变电站设备状态指示灯智能巡检监测系统。
该无人小车是利用循迹系统按照预定路线巡视,通过自主研发的视觉识别算法配合广角摄像头对标签进行定位、拍照、回传和指示灯状态识别的智能巡检设备,可大幅度提高工作效率,节约人力成本,拥有4G 传输、2.4G 无线传输、接触式传输等多种传输模式,并且可以通过客户端远程控制和实时查看回传数据等。1.5kg 的净重使得整体小巧轻便,续航可高达6 小时。可胜任高压室、控制室等各种变电站室内环境的日常巡检需求。为日后变电站自动巡检提供可行方案。主要分为两方面的研究:
①基于轨迹定制服务的巡迹无人小车巡检平台;
②基于柜机灯影像的设备状态识别算法服务。
巡检过程:
①小车自巡检过程中,摄像头依次自主搜索机柜二维码;
②检测到AprilTag 标签码小车停车并调整摄像头对焦拍照;
③无人小车返回实时影像;
④进行设备照片的存储管理等。
智能巡检系统由无人小车、通信模块和本地监控后台组成。(图1)

图1 智能巡检系统技术路线
3 无人小车
基于轨迹定制服务的巡迹无人小车巡检平台。无人小车由外形结构部件、运动控制模块、电源管理模块、图像采集设备和循迹模块组成。(图2)

图2 无人小车
3.1 外形结构设计
无人小车总重1350g,载重4000g,离地高度36mm,碳纤维增高杆1500m。底盘为铝合金材料,通过不同的车轮驱动系统在各个方向上移动或驱动。四个轮子分别位于矩形的四个角上,每个轮子都具有驱动功能。
由于变电站所处地形复杂,地面有电缆凹凸不平。所以无人小车底盘采用全铝合金底盘结构,减轻整体质量的同时兼顾稳定性,为适应变电站复杂地面环境,搭载了悬挂系统和越野轮胎,有较强的抓地力和越野能力,可有效面对高压室铺设地线槽等原因造成的地面凹凸不平且伴随沟槽的环境本产品可在上述地形环境中稳定运行,为精准识别、清晰拍照做了有效保证。4 根加粗油压金属减震器,能够增加四轮着地摩檫力达到减震目的。
云台能够向各个方法进行转动,保证摄像机无死角拍照。
3.2 运动控制模块
无人小车运动控制系统主要由运动控制器、电机驱动器、电机、车轮、减速器等组成[8],如图3 所示。

图3 运动控制系统组成
智能核心控制器为主控制系统,其优点是ARM Cortex-A72 1.5GHz(四核)处理器速度显著提升,拥有丰富的多媒体,多个内存版本和更出色的连接性,集成了连接USB 2 和USB 3 端口的PCIe 链路以及本机连接的以太网控制器,它具有极大改进的GPU 功能集,输入/输出速度更快。应用在本产品中可提高运行速度和响应速度以及多路控制的稳定性。
运动控制系统主要实现与本地监控后台的通信以及对小车和云台的控制功能。控制器模块根据循迹模块对黑白路线的采集数据进行分析处理,通过电机驱动器控制电机的正反转,从而实现小车的方向控制。
3.3 电源管理模块
由于部分变电站距离较远,因此采用3 串两并的12V锂离子电池。这类电池具有电压高、比能量大、循环寿命长、安全性能好等优点。并且具有过充保护、过放保护、短路保护等安全防护机制。5600mAh,8A 最大持续输出,可持续续航6h。
选用电池参数如表1 所示。

表1 电池参数表
无人小车在执行巡检任务时,在电池电量充足的情况下进入巡检状态,执行巡检任务,若电量不充足,则先充电再执行巡检任务,巡检结束后,小车返回充电处。无人小车具有电池电量监测功能,可设置电量下限。当无人小车的电池电量低于下限时,会停止巡检,返回充电器接口处自行充电。通过指令充电器插头部分和无人小车的充电插头部分能够自动断开和连接,以达到自动充电的目的。
3.4 图像采集模块
由于变电站大多处于昏暗环境,光线不足,针对这一问题,本研究决定采用星光级摄像机,通过识别AprilTag标签进行定位,对指示灯进行图像采集。AprilTag 标签是一个视觉基准库,类似于二维码,通过特定的标志可以快速检测标志,并计算相对位置,即使是在较暗的环境下也能够识别出,对光线要求较低。
本研究使用摄像头为MZ2291 星光级150°无畸变摄像头,IMX291 芯片,拥有 1920*1080 分辨率,30 帧/秒的刷新速度,利用自主研发的视觉识别算法可实现精准识别标签,搭载二自由度云台可实现多视角拍照。可完成变电站指示灯状态监测基本要求,具有拍摄完整,视角大等特点。
摄像机搭建在云台上面,云台能够向各个方向转动,提供不同的拍摄角度,满足指示灯图像采集需求。相机参数如表2 所示。

表2 相机参数表
3.5 六路灰度循迹模块
循迹模块为六路灰度循迹模块。灰度传感器和红外传感器有类似之处,但却有红外传感器所不及之特性,采用高亮聚光LED 灯光,接收管对不同反射光的强弱对比处理,只要对光反射强弱不同即可识别,颜色差值越大,分辨率越好[9],加入开模定制遮光罩使得产品性能得到进一步提升。数字量也称为开关量信号,是以高低电平输出作为信号的一种传感器,信号无需AD 转换并且不用复杂的算法即可实现信号采集和控制,极大提高了循迹的稳定性,可更加精准的按照预定路线运行。
本研究小车路线规划采用黑白线循迹,基于树莓派[10-11]开发板设计开发的智能轨迹算法[12-14]安装循迹传感器在设定好的跑道上按照设定路线完成移动。
在小车的前端放置红外光电传感器对黑白线跑道进行数据采集。传感器分布示意图如图4。
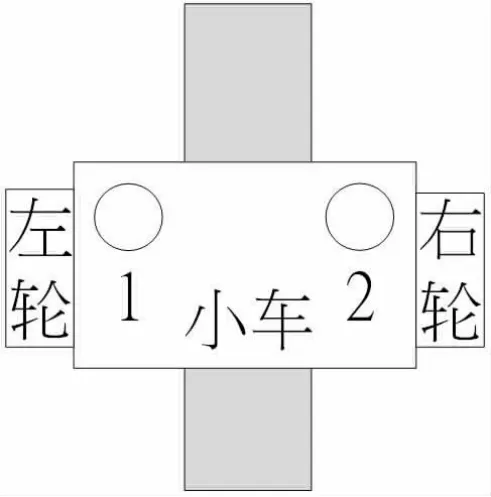
图4 传感器分布示意图
将光电传感器放置在小车的最前方可以提前确定路径。由于传感器发出的光对白色和黑色有不同的反射效果,因此得到的电压值不同[15]。跑道位置通过单片机中程序确定,从而控制小车行动方向。若左边1 传感器检测到黑色跑道,调整小车向左行驶。若2 传感器检测到黑色跑道,则调整小车向右行驶。
4 通信模块
为保障变电站数据传输安全,保障传输速率,因此不能采用WIFI 传输。无人小车通过点对点通信与监控后台进行信息交互并接收控制指令,进行云台转动、定点拍照、移动拍照、车体运动和自动充电等。信息交互内容包括无人小车本体状态和被监测设备图像数据。在通信中断、接收数据异常等情况下,图像数据不丢失,同时系统将发出告警信息,并在通信恢复后自动续传。
通信系统参数如表3 所示。

表3 通信系统参数表
5 本地监控后台
本地监控后台由计算机、通信设备、监控分析软件和数据库等组成。无人小车与监控后台通过无线局域网连接,发布指令控制小车移动,定点拍照。点对点通信进行指令和数据交互。
①实时监控模块负责查看小车运行过程中的图像信息、车体状态、电池状态信息、巡检任务等。
②任务规划模块分为日常巡检和遥控巡检,可随时进行任务模式的切换。根据变电站巡检需求,日常巡检可提前生成巡检任务,每天定期巡检;遥控巡检可进行手动控制,遥控小车进行巡检。
③历史查询和数据分析模块可实现历史巡检数据的存储、诊断和查询。
6 状态指示灯识别智能监测
以往对变电站状态指示灯进行巡检时,往往采用直接对指示灯图像采集智能分析识别[16]的做法,然而变电站所处环境通常较昏暗,光线不足,容易导致摄像头对指示灯位置定位不准确,采集图像质量不好,最终影响状态指示灯识别的正确,因此如何提高摄像头拍摄图像的准确性成为重要工作。
无人小车搭载自主研发视觉识别算法,通过识别特定标签匹配机柜编号,再通过二自由度云台进行多角度拍摄机柜。视觉识别算法可精通过标签进准定位,台账匹配实现机柜绑定,将传输数据发到服务器供客户端实时获取,客户端可实时查阅每个机柜多个视角的状态拍照,极大提高作业效率和精度。
状态指示灯识别流程如图5。

图5 状态指示灯识别流程
①AprilTag 码在昏暗环境下也能被识别,因此本论文提出在指示灯旁粘贴AprilTag 码标签,小车巡检过程中,摄像头先搜索机柜上AprilTag 码,检测到标签码后小车停车并调整摄像头对准摄像头对焦拍照。设备状态指示灯图像通过AI 算法自动识别判断指示灯状态。
通过AprilTag 识别算法进行识别,同时计算扫描AprilTag 的像素面积和中心点坐标,确定小车和AprilTag标签距离和相对位置,控制器根据距离和相对位置这两个参数产生两路不同占空比的脉冲宽度调制波形,并将其输出给电机驱动模块,从而控制小车停止运动,使得小车在指示灯正面停止。AprilTag 识别定位程序流程图如图6 所示。
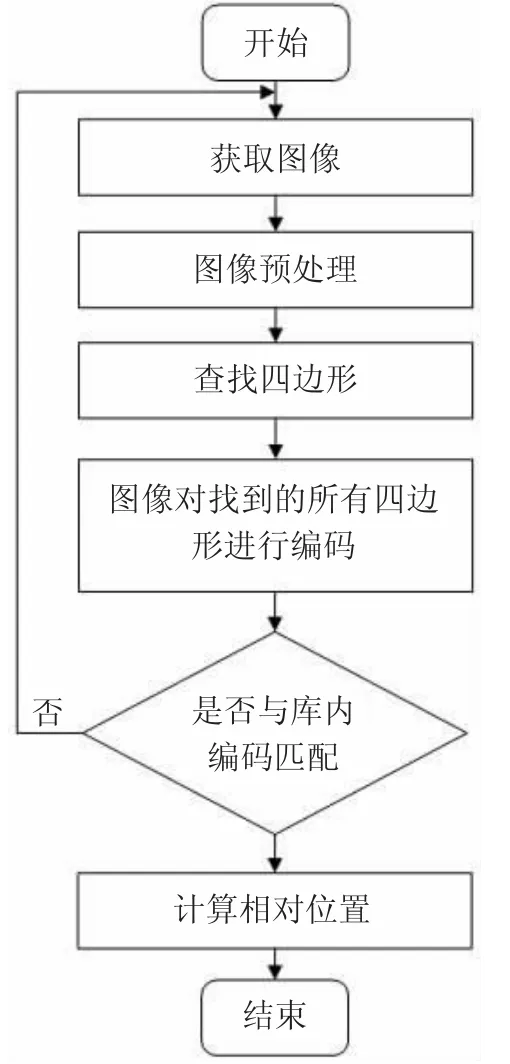
图6 AprilTag 识别定位程序流程图
后台通过摄像机拍摄到图像后,先对其进行灰度化处理,再对图片进行高斯滤波以消除图片中的高斯噪声,最后对获得的图片采用Canny 边缘检测算法[17-22]进行边缘检测。经过预处理后,消除图像中的无关信息,增强了有用信息,从而提高了识别AprilTag 的可靠性。
②无人小车携带的摄像机在识别到AprilTag 标签后,立即停止运动,对AprilTag 标签旁的指示灯进行拍照,采集到包含指示灯的图像后,通过图像处理系统确定图像中的指示灯颜色以及指示灯像素大小。在模板颜色库中,对指示灯颜色进行匹配处理。根据匹配结果和指示灯像素大小识别指示灯状态,实现设备指示灯状态的智能巡检,可以及时发现设备故障及异常情况。识别出指示灯为故障状态后,后台同时运维人员处理,可以大大减少人力成本。
③指示灯状态包括:正常状态和故障状态。模板颜色库中提前设置好正常状态对应的第一颜色范围,以及故障状态对应的第二颜色范围。在模板颜色库中,对指示灯颜色进行匹配处理的步骤包括:
指示灯颜色与第一颜色范围和第二颜色范围进行比较,根据匹配结果以及指示灯像素大小,若指示灯颜色在第一颜色范围内,并且指示灯像素大小在预设像素范围内,则确定指示灯状态为正常状态;
若指示灯颜色在第二颜色范围内,并且指示灯像素大小在预设像素范围内,则确定指示灯状态为故障状态。
7 结论
本论文通过对电网变电站智能巡检问题进行分析,对智能巡检装置中的无人小车、黑白线循迹、状态指示灯智能识别进行研究,提出通过星光级摄像机识别AprilTag 标签,确定指示灯位置,控制小车定点拍照,从而获取变电站指示灯状态图像的方法。设计出一套基于智能巡检装置的设备状态指示灯监测系统,极大提升变电站巡检效率,保障电网供电系统安全运行。
后续工作中将对更多变电站控制室进行考察,将固定增高架更新为折叠伸缩架;增加适配变电站控制室环境的自动回充系统,完成全自动无人值守;将现有功能优化,获取更强系统结构稳定性;优化视觉算法,优化指示灯状态识别。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:46
快乐语文(2020年36期)2021-01-14 01:10:32
科学大众(2020年17期)2020-10-27 02:49:02
文苑(2018年22期)2018-11-19 02:54:18
电子测试(2018年15期)2018-09-26 06:01:14
电子制作(2018年8期)2018-06-26 06:43:02
电子制作(2017年1期)2017-05-17 03:54:20
电子制作(2016年11期)2016-11-07 08:43:49
汽车维护与修理(2015年3期)2015-02-28 12:16:00
汽车维修与保养(2014年12期)2014-04-18 14:14:15