
精准高空抛出点定位仪
2022-02-21 01:45王文杰穆业帅李金龙何林兴鲁婷婷张春志
科学技术创新 2022年2期
王文杰 穆业帅 兰 鹏 李金龙 何林兴 鲁婷婷 张春志
(哈尔滨石油学院,黑龙江 哈尔滨 150000)
1 仪器研究背景
随着我国人口的快速增长和房地产业的开发,办公楼、居民小区等楼房高度逐渐提高,密度大和高度高成了我国房地产开发楼房的新趋势。然而,这些高空建筑又为社会带来了新的问题,一些人的文明程度跟不上时代的发展,使得高空抛物成为近代以来社会上出现的一个焦点问题,频发的高空抛物案件不断地刺痛着人们的眼睛。高空抛物行为危险系数极高,近年来不断出现高空抛物所引发的案件,给人们带来了极大的人身危害,严重扰乱了社会治安,许多人开始呼吁,希望能够及时解决高空抛物问题[1]。解决高空抛物问题成为了一个迫在眉睫的事情。
目前,对于解决高空抛物问题所采用的主要方法有人工巡逻、摄像监控和法律监管。
基于摄像技术的监控是许多学者认为对高空抛物问题的有效解决方案。许多地区都采用多重多种摄像监控设备,以此来对人们进行震慑和约束。许多小区、办公楼安保部门都耗费巨资,在主要的道路旁和建筑下架起了各式各样的摄像头,通过事后追责的方式来对高空住户进行威慑,以此来减少高空抛物事件的发生。这种方式虽然有效,但是仍存在设备数量多、无法提供实时追踪、后期信息处理工作任务重等问题。
法律监管。各国对高空抛物问题均有开展立法治理。其中,根据《中华人民共和国民法典》第一千二百五十四条之规定:从建筑物中抛掷物品或者从建筑物上坠落的物品造成他人损害的,由侵权人依法承担侵权责任;经调查难以确定具体侵权人的,除能够证明自己不是侵权人的外,由可能加害的建筑物使用人给予补偿。可能加害的建筑物使用人补偿后,有权向侵权人追偿。
本课题的研究旨在通过外部监管协助的方式,减少高空抛物行为对人类自身和财产安全带来的威胁,能够在高空抛物事件发生后,定位到具体住户或个人,减小事后追责的难度,提升社区管理效率。同时记录高空抛物的实时数据,进行分析、处理和上报。
2 仪器的基础-CCD 模块
定位仪主要传感器部件为CCD,它具有以下特点:灵敏度高、响应速度快、技术成熟、噪声低、成像质量高、自动扫描、图像畸变小和无残像。
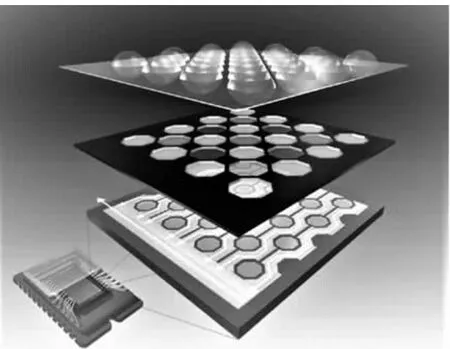
图1
2.1 CCD 传感器的分类
线阵CCD 传感器是通过使用一列像素对目标图像进行扫描,而后分别通过红、绿、蓝三色滤镜进行三次曝光,从而达到捕捉到一维图像。线阵CCD 一般将CCD 内部电极分成数组,一组称为一相,并且时钟脉冲施加是相同的。所需相数由CCD 芯片内部结构决定,结构相异的CCD 可满足不同场合的使用要求。线阵CCD 也有区别之分,分别为单沟道和双沟道,其中光敏区是MOS 电容或光敏二极管结构,生产工艺方面相对来说比较简单。其特点是外围电路简单,容易实现实时控制,处理信息速度快。线阵CCD 的研发主要用于平面广告、扫描仪、复印机等受移动局限连续光照的线性阵列物体。
面阵CCD 传感器是通过两列二维像素对目标图像区域进行扫描,在一次曝光中可以以任意的快门速度来及时捕捉所需二维图像,其主要运用于高级数码相机和监控器等方面。在高空坠物时,落下的物体由于具有一定的加速度,速度持续加快,这时,面阵CCD 的快门捕捉就起到了作用。
传感器三线CCD 是通过三列并行的像素分别对RGB 滤镜进行覆盖的,传感器三线CCD 主要用于高端的数码相机,以求取更高的分辨率。
2.2 CCD 与CMOS 的结构组成

图2
电荷耦合元件(Charge-coupled Device)能够将光学信号(光线)转换为模拟电流信号(电荷),通过放大信号电路和模数转换,从而实现对图像的摄取、储存、传递、处理和再现。CCD 光电传感器主要由感光二极管组块、读出移位寄存器、并行信号寄存器、信号放大电路和模数转换组块组成。CCD光电传感器将光信号转化为电信号后,通过转换电路输出到读出移位寄存器,经过信号放大电路和模数转换组块实现图像的输出,从而完成图像的输入与输出工作。CCD 器件由硅材料制成,其特色在于充分保持信号在传输的时候高度保真。
CMOS 称为“互补金属氧化物半导体”,CMOS 的技术实际上只是将晶体管放置在硅晶块上,只是CMOS 的每个像素需要单独搭配一个“放大器”,这就会带来了两个问题:一方面,在每个像素中“放大器”都要占用一定面积,这部分面积不能感光,会直接损失图像;另一方面,要让每个“放大器”的放大效果保持均衡很困难,这也会增加噪点。CMOS 制作的流程相对简单,没有专属的通道设计,需将各个像素的资料先行放大再进行整合。
2.3 距离传感器
距离传感器是利用激光或超声波来测量物体距离的传感器,其主要作用是,用来测量物体的位置随时间变化的规律,使用它可以完成多种运动学和动力学测定。譬如,坠落物体的高空测速。并且,距离传感器作为一种可靠的工具,可用于各种应用,以实现精确、快速的测量和广泛的材料发现。用于高空抛物中,可起到一定的作用。距离传感器的工作原理是产生某种波,比如激光、红外发光二极管或超声波。然后它会读取波传播回来后的变化情况。这种变化主要取决于返回信号的强度和返回所需的时间等。
3 目标图像追踪方法
帧差法:要想在视频中捕获到物体的物理移动轨迹,就需要将视频长度无限细分,得到单张的图像,再通过二维坐标定点分析,从而整合到物体的移动轨迹,这种方法也叫做帧差法。当两个图像的时间间隔足够小时,图像中的像素点基本是相同的,当像素点发生变化,也就是物体进行移动时,对应的像素点也会发生变化,从而通过对比得到目标物体的移动轨迹。公式为:Ik-1(x,y)的差分图像。

注:Dk(x,y)是第k 帧图像Ik(x,y)和第k-1 帧图像
而后,进行差分图像的阈值分割[2],进而得到二值化[4]的前景图像:

注:Tk(x,y)为二值化的前景图像。
背景差法:背景差法是通过提前建立好背景模型,后期通过单帧图像与背景模型进行对比,从而对目标区域进行检测。目前建立背景模型的方法主要有:中值背景建模法、均值背景建模法、单高斯分布模型法和混合高斯分布模型法[8]。背景差法的公式为:
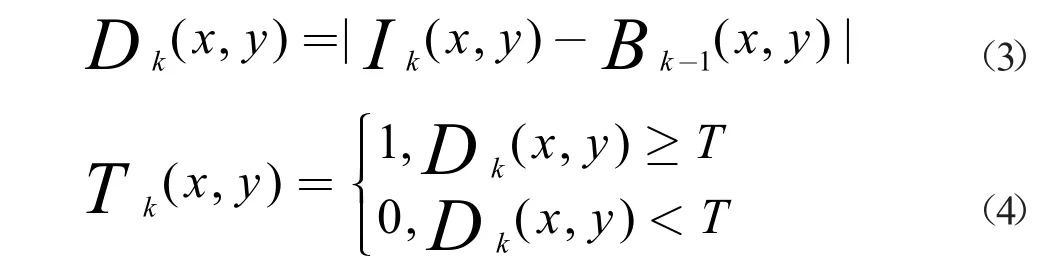
注:Bk-1(x,y)是建立的背景模型[9]。
以上在进行了运动目标检测后,在视频测速系统中也是通过跟踪得到的运动轨迹来计算运动目标的速度。接下来,对运动目标进行跟踪,其目标跟踪目的是想用于定位仪获取的图像序列进行分析,从而利用二维坐标系计算出目标在每帧图像时刻的目标,根据不同的特征值,再将图像序列内不同帧率的同一运动目标关联在一起,进而得到运动目标完整的运动轨迹。
4 仪器的基本结构与运行
该仪器是基于CCD 的近红外定位仪,将两个CCD 定位仪相隔一定高度放置。首先让定位仪对静止背景进行图像采样并保存,随即定位仪采集的图像不断的和原背景图像做差分运算来检测抛出物体,即计时信号触发。当定位仪1 检测到有抛出物体进入并且运动到测量标线后,此时监测端计时开始;之后定位仪2 也检测到抛出物体进入并且运动到测量的标线时,计时结束。此时可以得到两个定位仪检测到运动物体的时间差,由于两个定位仪测量区域包含的测量标线间距离是固定值,所以用这个固定的距离值除以两定位仪检测到物体的时间差值,此时运动物体的速度就可以计算出来。由于两个定位仪放置的间距很近,并且传感器CCD 采样频率很高。因此对于测量运动物体或者运动物体速度是可行的,并且测速的系统具有较高的精确度,为了使CCD 光电传感器能够正常工作,需要有时序的产生及相应的驱动模块[6][10]。

图3
在两层AB 单元中间布置一根高3 米的立杆,两个定位仪以上下对称排布,其监测范围覆盖AB 单元所夹道路,保障抛物行为能够得到记录和监测。
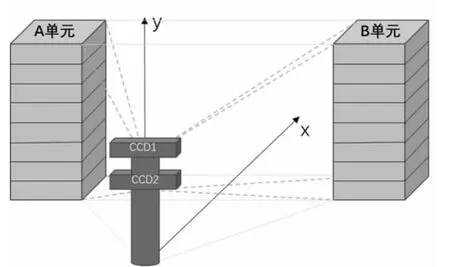
图4
两台内置面阵CCD 图形传感器及距离传感器仪器全天工作,监测两面楼层。当物体出现在面阵CCD1 图像监测范围内,即进行第一次连帧记录,而物体经过面阵CCD2 时则进行第二次连帧记录,以及距离传感器对抛出物体距离的获取,通过仪器的工作将数据进行上传,此时硬件工作已完成。其中面阵CCD1 连帧的画面提供了初速度、角度、变化及抛体运动类别。结合面阵CCD2 的连帧画面,可计算得出某时刻的瞬时速度,原因如下:面阵CCD1 与CCD2 两台仪器设备之差为△x,选取的两张图片帧差时间间隔为t,即可得出物体在某时刻的瞬时速度。由于面阵CCD1 上传的连帧画面在软件层次判断出抛体运动类别,从而做出不同的处理,来解决现实问题中高空抛物的各种类型。如斜上抛、斜下抛、平抛、竖直上抛和竖直下抛,实现在VisualC++中调用不同函数进行处理数据和呈现数据。采用Visual C++ 开发环境,该开发环境为源代码编辑、源代码浏览、项目管理与配置和调试工具提供强力支持。由于距离传感器数据的传输会判断出被抛物体到仪器的距离,这也是锁定窗户的条件,而要锁定居民住户则需要进行窗户编号,此方法便于信息呈现和记录查找。当面阵CCD1 监测到物体出现时,产生计时触发信号,这个时间点呈现在抛物记录信息条中。抓取的图片进行二维坐标分析处理,以道路长度为x,定位仪监测范围高度为y,这样就把空中抛出物体在二维坐标系中以一个点呈现,寻找抛出点就是在找如图中的初始点P[3][7]。
距离传感器通过发射能量波束并由被测物体反射,计算波束发射到被物体反射回来的时间,来计算与物体之间的距离。这种传感器测量精度高,可以精确测量距离,针对距离变化产生信号的传感器原理和形式多,距离传感器并不要求对距离做出定量检测,只需判断在设定的距离范围内是否有物体出现。
据以上距离传感器数据的传输会判断出被抛物体到仪器的距离,这也是坐标寻找的条件,窗户编号锁定居民住户,此步骤可以找到对应的坐标x,从而找出物体抛出点。
以上抛出点的寻找可以二维坐标呈现和分析如图5。

图5
在显示是模块,本次高空抛物数据以信息条呈现,并截取此时间点的抛物连帧视频展现于信息条中,而后以传统视频模式播放。如图6。
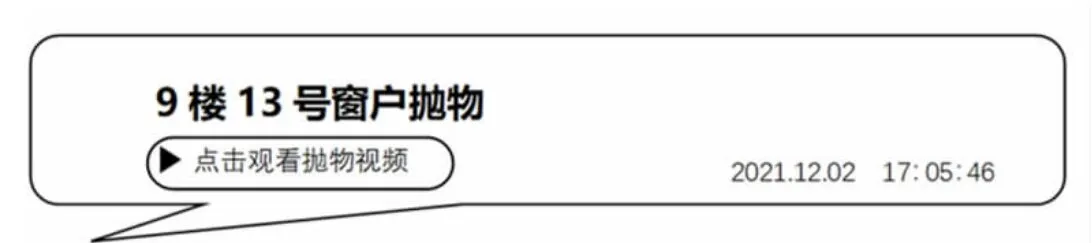
图6
这样,无论是否发生事故的高空抛物事件,都会记录事件处理和警报的数据,触发的警报装置便于提醒物业及管理人员处理,也可向公安机关呈交数据。
5 总结
本定位仪主要以双面阵CCD 传感器作为图像采集前端装置,以计算机软件作为图像分析处理和信息储存装置,通过对目标图像进行二维化分析,使抛出点转化为二维坐标并通过软件系统分析处理,而后将处理结果以信息条的形式呈现。本仪器的研究对于解决高空抛物问题意义重大,在解决高空抛物问题领域相对空白的情况下,本仪器能够有效地解决高空抛物相关问题,并为以后的相关研究提供有效的参考。对于该仪器未来可能进行的研究,将会从数据的精确度和仪器的实际应用方面进行展开。
猜你喜欢
法律方法(2022年2期)2022-10-20
数学物理学报(2022年5期)2022-10-09
环球时报(2022-02-28)2022-02-28
小天使·一年级语数英综合(2019年2期)2019-01-10
小天使·一年级语数英综合(2018年11期)2018-11-23
小学阅读指南·低年级版(2018年5期)2018-11-02
价值工程(2018年28期)2018-09-20
消费导刊(2017年21期)2017-01-28
艺术科技(2016年9期)2016-11-18
汽车维修与保养(2012年12期)2012-07-25
