
水肥一体机肥液电导率远程模糊PID控制策略
2022-02-21 08:20:32朱德兰阮汉铖吴普特李景浩陆丽琼
农业机械学报 2022年1期
朱德兰 阮汉铖 吴普特 李景浩 陆丽琼
(1.西北农林科技大学水利与建筑工程学院, 陕西杨凌 712100;2.西北农林科技大学旱区农业水土工程教育部重点实验室, 陕西杨凌 712100;3.西北农林科技大学水土保持研究所, 陕西杨凌 712100)
0 引言
水肥一体化是一项高效节水减肥的农业灌溉新技术,该项技术在提高水资源利用效率,促进农业节本增效方面意义重大[1-4]。在对作物进行施肥灌溉过程中,施肥浓度控制在最优控制范围内有利于作物根系的发育及土壤中矿物质的吸收[5]。随着物联网与5G技术的发展应用,数字技术能极大地提升农业生产效率[6-7]。按照作物水肥需求进行“互联网+农业”模式的精准控制是实现农业智能化的关键。
水肥灌溉系统肥液浓度调控若存在严重非线性、时变性和滞后性等问题将影响智能灌溉系统的整体运行效率[8-9]。目前,国内外主要采用PID控制和模糊控制策略来实现作物智能灌溉,取得了较好的控制效果。文献[10-12]基于PID、模糊控制对水肥流量等进行控制并仿真。李加念等[13]基于PWM(Pulse width modulation)以输出相应的占空比来控制吸肥电磁阀的开闭,进行灌溉液电导率(EC)的动态调控。文献[14-19]设计了基于FPGA、无线传感网络、ZigBee和模糊控制决策相结合的自动灌溉系统,使控制系统具有良好的控制效果。文献[20-28]根据传感器采集的溶液电导率信息或酸碱度信息,采用模糊控制策略控制混肥泵、电磁阀等进行肥液或营养液的本地端在线自动混合,实现了水肥一体化的自动控制。赵景波等[29]针对智能水肥一体机混肥浓度非线性问题,提出了一种变域模糊控制算法,但目前只有仿真结果。综上所述,PID控制和模糊控制在变量施肥系统中得到了研究人员的广泛关注,也取得了部分成果,但主要是针对本地端对作物施肥灌溉进行单一的控制,以模拟仿真为主,对水肥灌溉系统进行远程智能化浓度控制研究相对较少。
本文基于物联网设计一个可实现计算机、手机微信多终端灌溉数据监测和开关量控制的远程水肥灌溉系统,以解决水肥灌溉系统EC调控非线性、时变性和滞后性等问题,实现对水肥一体化装置EC的远程模糊PID控制,通过对注肥泵变频调速改变吸肥量,动态调节灌溉液EC,提升水肥控制精度和稳定性。
1 水肥灌溉系统
1.1 系统结构与设计
水肥灌溉系统结构如图1所示,该水肥灌溉系统由供水组件、吸肥组件及控制组件3部分组成。供水组件主要由蓄水池、自吸离心变频泵组成,为施肥和灌溉提供水源和动力。吸肥组件主要由肥液罐、文丘里管、变频注肥泵组成。肥液罐用来存储肥液;变频注肥泵提供动力,注肥泵驱动水流流经文丘里管喉口,产生负压,吸入肥液,将肥液注入主管混合。控制组件主要由传感单元、上位机、控制器组成。传感单元用来采集流量、压力、EC信息,为系统软件进行水肥耦合调控提供决策数据;上位机主要包括本地端触摸屏和远程用户终端设备(手机或计算机);控制器PLC主要接收上位机指令,对水肥灌溉系统的开关量、变频注肥泵转速进行控制。

图1 水肥灌溉系统总体结构示意图Fig.1 Water fertilizer irrigation system structure drawing1.蓄水池 2.恒压供水系统 3.自吸离心变频泵 4.压力表 5.电磁流量计 6.手动阀门 7.电磁阀 8.EC传感器 9.文丘里管 10.肥液罐 11.叠片过滤器 12.单向阀 13.变频注肥泵 14.变频控制系统 15.供水组件 16.控制组件 17.吸肥组件
1.2 肥液EC模型分析
肥液混合模型选择典型的一阶滞后模型。M(t)表示文丘里管的吸肥量,由于文丘里管的吸肥量、进口流量与变频注肥泵频率有关,将其改为与频率f(t)有关的变量,表示为f(t)qw、f(t)qm,根据质量守恒定理,有
(1)
式中VT——混肥管道中肥液体积,L
C(t)——混肥管道中和出水管肥液浓度,%
C0——进水管中肥液浓度,%
C1——肥液罐中肥液浓度,%
qw——文丘里管最大吸肥量,L/h
qm——主管进口最大流量,L/h
q2——主管出口流量,L/h
t——变频注肥泵工作时间,s
等式左边是混肥管道中肥液质量的微分,右边表示进水管中肥液质量与文丘里管吸收的各个母液的肥液质量之和减去出水管中肥液的质量。由于浓度与EC成正比关系[30],式(1)可变为
(2)
式中E(t)——混肥管道中和出水管肥液的EC,mS/cm
E0——进水管中清水的EC,mS/cm
E1——肥液罐中肥液的EC,mS/cm
将式(2)进行拉普拉斯变换后得
(3)
由式(3)可知,控制响应特征为一阶线性系统。在实际试验中,设备工作时出口压力为0.35 MPa,根据实测数据,VT=50 L,qm=3 000 L/h,qw=640 L/h,E1=10 mS/cm,E0=0.6 mS/cm,滞后时间为10 s。将上述变量代入式(3)得EC的近似传递函数为
(4)
2 远程模糊PID控制系统设计
2.1 远程控制系统结构
远程控制系统由本地端、远程端两部分组成,组成结构如图2所示。本地端主要由三菱FX-3u系列PLC、云盒(上海智能科技有限公司)、触摸屏(MT6103iP型)、电磁阀、变频注肥泵(广东凌霄泵业有限公司,量程:0~5 m3/h)、EC传感器(南京昊科电子有限公司,量程:0~20.0 mS/cm)等组成,云盒与PLC通过RS-232有线连接,PLC通过RS-485总线与触摸屏连接;远程端主要由云端服务器、用户终端设备、开发者服务终端组成。EC传感器通过RS-485总线与云盒连接,本地端通过云盒与远程端进行动态数据交换;用户终端设备主要包括用户计算机或手机微信小程序,实现对本地端设备进行远程操作控制;开发者服务终端通过API接口与云端服务器连接,主要对传感器数据进行存储、控制算法处理,PLC的DA模块将远程控制算法输出数据输入,控制变频注肥泵变频调速,改变注入主管的肥液量进而实时控制水肥灌溉系统出口肥液EC。
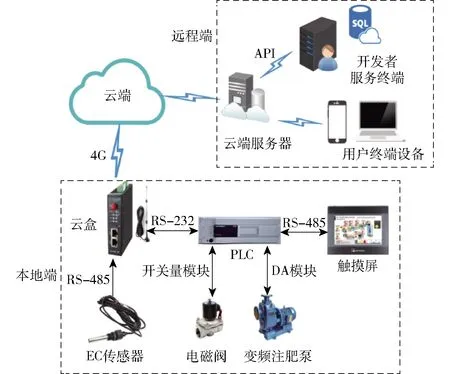
图2 远程控制系统框图Fig.2 Remote control system diagram
2.2 模糊PID调控方法设计
2.2.1模糊PID控制器设计
模糊自整定PID控制器由模糊控制器和PID控制器两部分组成,其基本原理框图如图3所示。该控制器以EC误差e和误差变化率ec为输入量,经过模糊化和模糊推理后得到PID控制器的3个控制参数修正量Δkp、Δki、Δkd,实现PID控制器的3个参数Δkp、Δki、Δkd的在线修正,最后实现控制变频注肥泵频率以调整肥液EC。
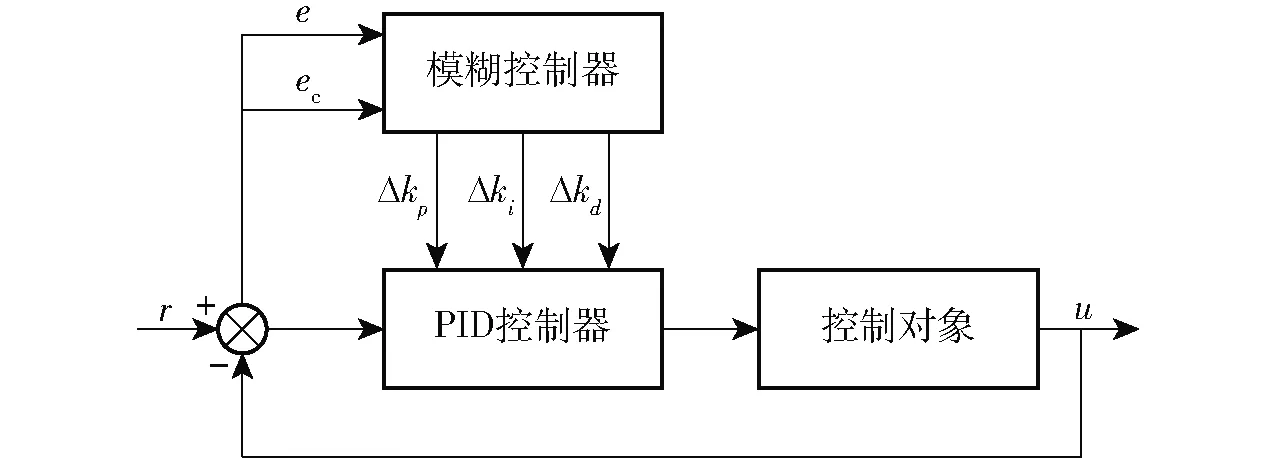
图3 模糊自整定PID控制器结构框图Fig.3 Structure of fuzzy self-tuning PID controller
自整定PID 3个参数修正公式为
(5)
式中kp——整定后比例系数
ki——整定后积分系数
kd——整定后微分系数
kp0——整定前比例系数
ki0——整定前积分系数
kd0——整定前微分系数
Δkp——比例系数修正量
Δki——积分系数修正量
Δkd——微分系数修正量
2.2.2模糊论域及隶属度函数
云端远程实时采集的EC与目标值的误差e和误差变化率ec的语言变量模糊子集均取为{NB(负大),NM(负中),NS(负小),Z(零),PS(正小),PM(正中),PB(正大)},量化为7个等级,模糊论域均取为{-3,-2,-1,0,1,2,3},模糊子集选用三角形隶属度函数,隶属度函数如图4所示。
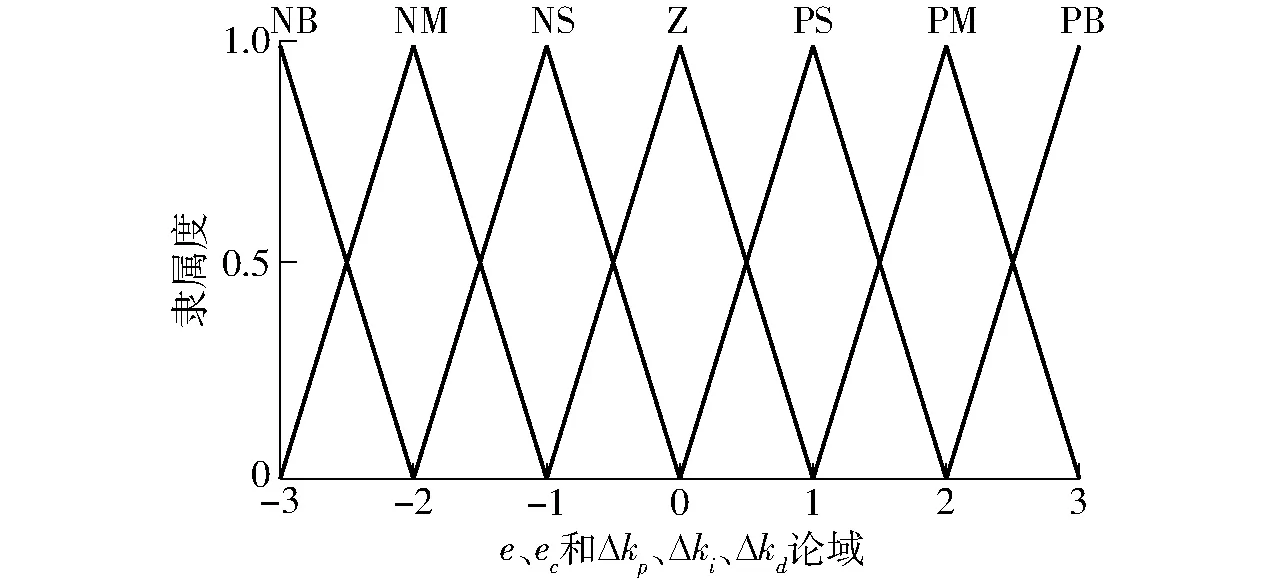
图4 e、ec和Δkp、Δki、Δkd的隶属度函数曲线Fig.4 Membership function curves of e, ec and Δkp、Δki、Δkd
2.2.3控制规则制定
模糊控制规则表是根据水肥灌溉系统中EC变化规律和人员经验,综合考虑水肥灌溉系统的稳定性、超调量及响应速度等因素而建立的关系表。通过分析和仿真调整,针对水肥灌溉控制系统,制定PID控制器3个参数调整量的模糊规则,以Δkp为例,其控制规则如表1所示。

表1 Δkp的模糊控制规则Tab.1 Fuzzy control rules of Δkp
2.2.4解模糊计算
在水肥灌溉控制系统中,经过模糊逻辑推理后,得到PID的3个控制参数的模糊集合,不能直接转换为精确量输出,必须经过解模糊。本研究采用重心法解模糊化,将输出量kp、ki、kd提前清晰化,转换成相应的量化值,然后将运算结果填入模糊控制查询表中,储存在计算机系统中,以Δkp的模糊控制查询为例,结果见表2。系统运行时,通过查询表格,即可得出确定的输出量,再乘上相应的比例因子,得到相应的频率模拟量,通过PLC控制器D/A转换输出到变频器,进而控制变频注肥泵改变文丘里管吸肥量,完成其变频控制。
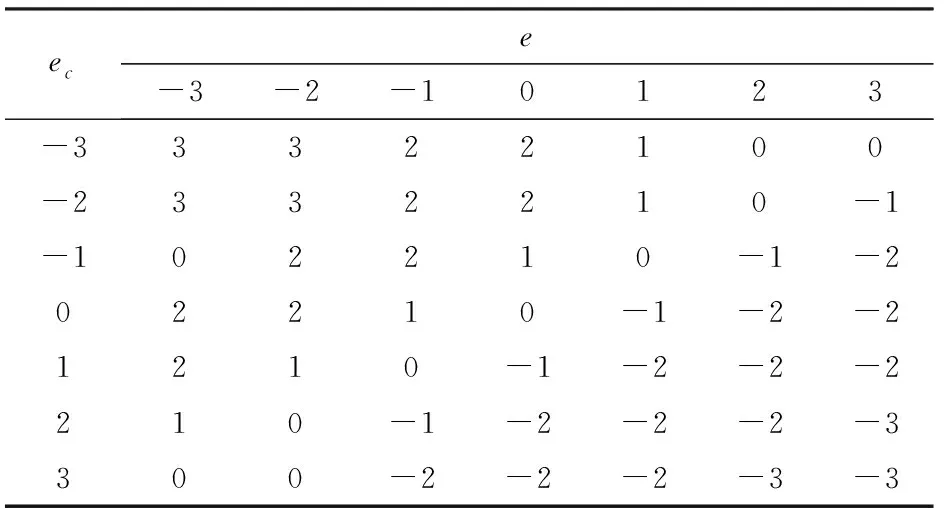
表2 Δkp的模糊控制查询Tab.2 Fuzzy control query of Δkp
3 试验验证
试验装置如图1所示,在西北农林科技大学旱区节水农业研究院灌溉水力学实验大厅进行,试验中通过变频恒压供水系统(量程0~0.5 MPa,精度±0.005 MPa)提供试验所需的主管恒定水压。肥液罐中的母液为使用硝酸钾肥料配制成EC为10 mS/cm的溶液,使用EC传感器实时检测灌溉出口EC,电磁流量计(EMF-5000型)检测主管进口流量,EC通过云盒上传至云端进行实时记录。试验操作时通过水肥灌溉系统的触摸屏或用户终端设备上设置施肥配方、阀门开闭、灌溉策略和目标EC等内容。
保持主管压力为0.35 MPa,主管出口流量为3 m3/h,采用远程模糊PID控制算法和本地端PID控制算法,采样周期定为5 s,连续测量300 s。设定不同EC进行对比试验,结果如表3所示。
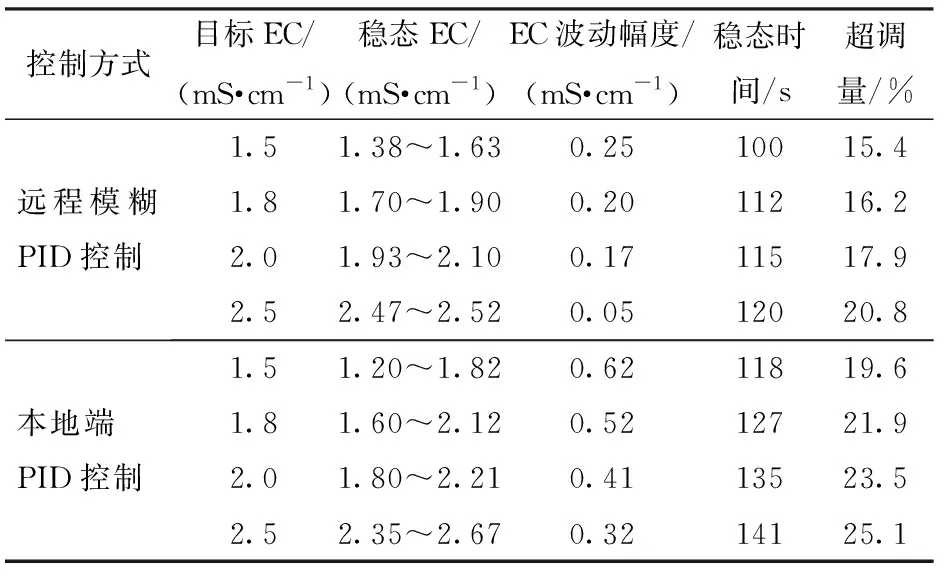
表3 不同EC设定值的试验对比结果Tab.3 Comparison results of different EC settings
由表3可知,当目标EC越大,采用远程模糊PID控制或本地端PID控制时,EC波动幅度越小,稳态EC越精确,但稳态时间和超调量均增大,即滞后性增大,稳定性增强;在同一目标EC时,采用远程模糊PID控制相较于本地端PID控制EC波动幅度小,响应快,超调量小;模糊PID控制策略调控水肥所需时间为100~120 s,一般水肥一体化设备应用于日光温室生产实践中时,水肥从设备灌溉出口达到滴头的时间至少在2 min以上[30]。由此可见,所开发的基于物联网的远程水肥灌溉控制系统能够满足实际施肥灌溉需求。
4 结论
(1)在文丘里吸肥器的基础上,利用物联网技术搭建了一个远程水肥灌溉系统,实现了水肥灌溉系统的计算机、手机微信多终端灌溉数据监测和开关量控制,在远程开发终端使用控制策略实现对水肥灌溉系统EC的实时变频调控。
(2)在确定的使用环境下,简化了水肥装置混肥的数学过程,建立了操作性强的一阶滞后线性系统模型,为水肥EC调控策略提供理论依据。
(3)根据水肥EC调控的滞后和不稳定性,调控系统采用远程模糊PID控制策略。通过设定不同目标值与本地端PID控制对比试验发现,目标EC越大,稳态EC越精确,但稳态时间和超调量均增大;在同一目标EC时,采用远程模糊PID控制相较于本地端PID控制其波动幅度小,响应快,超调量小,能够满足实际施肥灌溉需求。
猜你喜欢
磷肥与复肥(2024年2期)2024-04-01 07:18:40
节水灌溉(2023年8期)2023-08-28 02:02:28
云南化工(2023年6期)2023-07-04 01:35:20
排灌机械工程学报(2022年11期)2022-11-26 06:57:52
灌溉排水学报(2021年1期)2021-01-27 00:48:22
湖北农机化(2020年4期)2020-07-24 09:07:14
化工管理(2020年10期)2020-04-30 10:20:36
北京汽车(2019年3期)2019-07-19 01:44:08
电子制作(2018年23期)2018-12-26 01:01:10
通信电源技术(2018年3期)2018-06-26 08:06:18
