耙吸式挖泥船在航道扩建工程中的施工技术要点探讨
2022-02-20 11:37:00李建国
福建交通科技 2022年11期
■李建国
(厦门港务疏浚工程有限公司,厦门 360000)
航道是港口的重要基础设施和进出港的重要通道,随着经济的发展,交通运输物流工程对船舶大型化、专业化、密集化的通航需求日益增强,迫切需要将现有航道扩建。 航道扩建工程主要内容为航道增深、扩宽等,相比于新建航道工程,具有其独特性,包括:(1)扩建施工环境更加复杂;(2)水上作业的难度,海上施工受风浪、台风等极端恶劣天气影响;(3)施工标准更高;(4)施工过程原有航道保持通航,需协调好各施工环节,避免产生干扰。 鉴于航道扩建工程的施工独特性,有必要采用合理的施工方案,提高施工技术水平,以此降低自然因素以及技术因素等的影响,确保其他船舶航行安全和工程安全进行,进而促进工程建设质量的实质性提高,保质保量、按时完成工程任务。本研究以耙吸式挖泥船施工技术为例,进行技术总结,以期为同类工程提供参考。
1 工程概述
1.1 工程概况
厦门某航道工程建设范围为全长约9.18 km,设计底高程维持-12.0 m,为满足10 万吨级船舶乘潮通航要求,将航道通航宽度由190~200 m 拓宽为250 m,疏浚工程量为92.17 万m3,疏浚弃土外抛,抛泥区距离疏浚区平均运距约35 km,工程地理位置见图1。
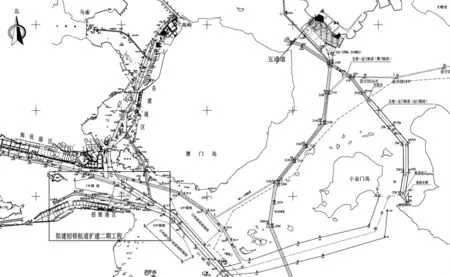
图1 工程地理位置示意图
1.2 工程难点分析
根据勘察,本工程施工的难点包括:(1)区域疏浚里程长,疏浚开挖厚度不一;(2)航道南边线距离港区码头前沿线348~442 m,北侧与锚地相邻,附近通航及锚泊的船舶多;(3)疏浚施工要确保不能影响船舶正常通航和港区的正常生产;(4)疏浚水域面积广,无法明确是否存在垃圾及其他障碍物等。
2 施工方案选择
目前常用的2 种施工方案:抓斗式挖泥船和耙吸式挖泥船。
2.1 抓斗式挖泥船
抓斗式挖泥船是一种机械式挖泥船,通过抓斗自身的重量切入泥土,通过操作闭合泥斗,将疏浚土装到泥驳船,通过泥驳船将疏浚土运到指定卸泥区(图2)。 抓斗船施工主要采用纵挖法,纵移挖长,横移挖宽,定位主要采用“四缆定位法”,用4 个锚缆收放、前后左右移动进行施工定位。 锚及锚缆可能占用部分通航水域,给在附近航行船舶造成一定碍航影响,避让时需辅助船舶拖带撤离,机动性不强,除了在航道清礁中使用,其他航道疏浚施工中使用较少。

图2 抓斗船施工流程
2.2 耙吸式挖泥船
耙吸式挖泥船是一种装备有耙头挖掘机具和水力吸泥装置的大型自航、装仓式挖泥船[1]。 施工时,将耙臂放下海底,通过耙头对土层的泥沙进行耙松和挖掘,再利用船上泥泵机的真空作用,将挖掘的泥沙通过输泥管吸入挖泥船的泥仓中,泥仓装满后,停止挖泥,起耙航行至抛泥区开启泥门卸泥(图3)。 耙吸船具有良好的航行性能,可以自航、自载、自卸,是目前航道工程普遍采用的,其工艺和施工方案成熟,设备较先进。
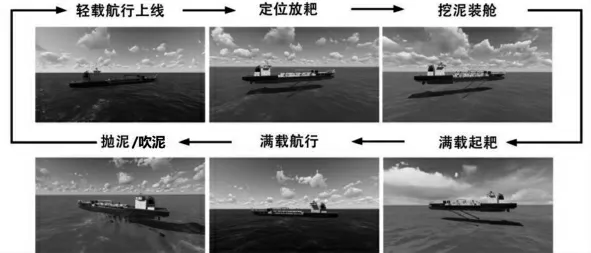
图3 耙吸船施工流程
2.3 2 种施工方案比选
本工程疏浚区范围长且疏浚量大,综合考虑各种影响施工的自然因素及疏浚土土质类别,结合水深、水文及通航情况等因素分析。 由表1 可知,耙吸式挖泥船施工具有效率高、调头灵活、及时避让、对通航船舶影响小、适应恶劣工况的能力较强、工期短、成本低等优点,本工程即采用自航耙吸式挖泥船施工,以耙吸式挖泥船工艺阐述航道扩建工程施工技术[2]。
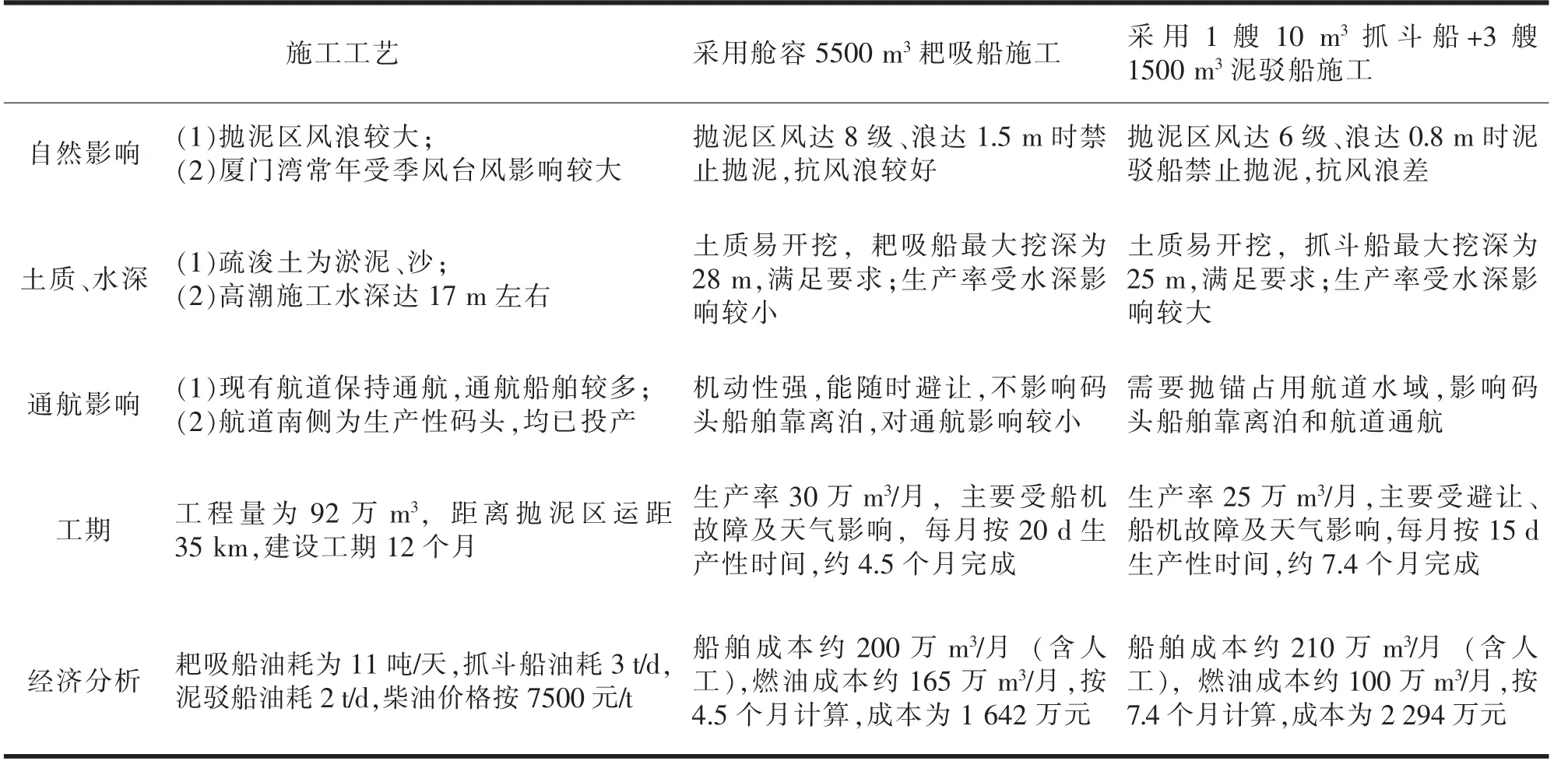
表1 施工工艺影响因素分析
3 施工关键点分析
3.1 耙吸式挖泥船施工技术要点
耙吸式挖泥船开挖航道主要采用装舱施工法,施工前应对船舶定位系统和耙头下放深度的数据进行校准,在施工区域附近选择好便于观测潮位的位置,设置潮位观测尺,有条件的最好建立实时潮位站接收系统,施工前先进行试挖,对疏浚区的土质取样分析,根据船舶性能和施工区长度及开挖的土质选择不同的挖泥对地航速,操耙手要实时关注潮水变化和船舶吃水深度,随时调整耙头的下放深度,提高施工精度,通过优化挖泥船施工线路,控制施工平整度,减少开挖废方。 不同土质需调整船舶施工参数,选择最佳的装舱溢流时间,在保证环保疏浚效果的前提下降低工程成本,从而减少对周围水体的扰动,控制污染,减轻对周边海洋环境的影响。 施工时要根据进度及时安排浚后水深测量,按水深测量成果安排重点施工区域,使疏浚区域水深均匀增深,以便形成贯通的槽内水流,提高施工效率,减少施工回淤,提高质量控制水平。
3.2 影响施工的主要因素
3.2.1 船舶通航影响
本工程是在现有航道的基础上进行扩建,施工区域及周边各类船舶通航密度较大,为减少疏浚施工对其他船舶的干扰和影响,要和港口、海事等相关部门建立联系机制,结合海事AIS,准确掌握航行船舶动态和施工船舶动态,高频专人守听,服从海事VTS 指挥,做好施工船舶与进出港船舶之间的避让等,确保施工的安全、有序,应严格按照航行安全制度和规范操作,保证其他船舶航行安全和本工程安全进行。
3.2.2 航道航标影响
本工程原航道中的航标设施功能保持,耙吸船在施工作业需避让航标区域,受航标影响区域无法施工。 施工船舶的挖泥以及夜间施工的照明可能会影响到灯浮效能的发挥甚至对航标造成损坏。 航标会随涨潮退潮流向移动,为确保航标和施工安全,根据移动范围在航标周边区域约150~200 m 范围暂时不施工。 在航标区域以外的疏浚区完成施工后,在确保通航安全下,对施工区内的航标进行小范围移动。 移动后集中力量对原航标区域进行施工,待该区域疏浚完后再将航标恢复至原来位置, 航标调整以尽量不缩窄航道、不影响船舶通航为原则。
3.2.3 自然条件影响
航道疏浚施工区在海上,影响耙吸船施工的主要因素有涌浪、风、雾等,其中风和涌浪是影响船舶安全航行常见的自然因素。 船舶受风的影响会出现偏转、漂移等情况,受涌浪的影响会出现摇摆现象,严重时还会出现船舶失控,导致触碰及沉船等事故。施工期还需考虑到跨越季节性海洋气候遇到寒流过境或雷暴雨等异常天气情况。 施工时驾驶员应控制好航速及航向,根据土质和挖深,设定合适的波浪补偿器压力, 通过波浪补偿器的缓冲作用保持耙头对地有合适的压力[3],保证船舶设备安全和施工效率。
3.2.4 疏浚底质影响
海底水域底质情况复杂,除疏浚土外,含有石块、废弃渔网、垃圾等杂物(图4),严重可造成堵耙,对施工影响较大,施工时应及时起耙清理垃圾并对耙头、耙齿的磨损情况进行检查。 操耙手在挖泥中应时刻关注泥泵机真空数值、管内浓度及流速等数值低于限值,防止堵耙现象[4],必要时可在耙头吸口处增设格栅(图4),确保挖泥设备的安全。

图4 航道内挖出的块石及垃圾、耙头吸口处格栅
3.3 质量控制要点分析
3.3.1 挖槽施工方法要点
根据航道挖槽长度、 宽度、 挖深采取分段、分带、分层开挖,按设计水深、航段长度、土质变化等情况灵活调整分段长度,段与段之间进行50 m 搭接施工,以防漏挖。 横向分带宽以50 m 为1 带,带与带之间需搭接一定的宽度,防止漏挖形成浅埂。挖深按照每层1 m 进行分层,不足1 m 的部分直接挖深到设计深度。 施工时,在保证施工效率的前提下,尽可能做到同步、均匀增深,以形成贯通的槽内水流,减少施工期回淤,同时保证施工质量,减少后期扫浅工作量。
3.3.2 边坡施工方法要点
为保证形成稳定的设计边坡,采用“分层施工,一次成型”的方法。 运用耙吸船疏浚监测平台,通过软件按照测图水深不断显示前方断面的水深形态,同时把耙头的定位姿态加入断面图中,以纵、横、深三维形态方式辅助准确下耙(图5),并实时更新耙头所经过的水深轨迹线;驾驶员可以依据图形界面调整船舶,使耙头准确上线,提高施工效率和边坡施工质量。

图5 航道与边坡开挖三维界面
3.3.3 扫浅施工方法要点
(1)进退挖泥法。 当扫浅区为航道终端,水域受限、船舶难以实施回转调头时,或需调头航行再上线挖泥耗费过多时,或挖槽较短时,可根据船舶操作条件和水域情况采取进退挖泥法。 在挖到终点或挖过浅点后,起耙离地并将耙头提升至安全高度,然后开倒车使船退回起挖点,确认船已不再存在对地后退时,转进车时再次下耙至开挖深度。(2)“S”字型、“X”字型挖掘法。在扫浅施工时,对疏浚区内浅点进行划分,若为孤立浅区或单个浅点及垅沟,采用“X”字型方法扫浅,对各浅点逐个挖除,施工走线与进退挖泥法类似,施工过程中不停改变耙头与浅点的走线角度, 防止耙头反复同向施工再次挖出垄沟。若为连续浅点和孤立浅点, 将浅点组合串线划成区,采用“S”字型挖掘法逐个挖除。
4 工程扩建效果评估
本单位工程于2021 年9 月7 日正式开工,2021 年12 月31 日自检合格,2022 年3 月29 日进行第三方测量,4 月30 日扫浅施工完毕,5 月23 日通过第三方测量验收。 本航道扩建工程经质量监督执法支队鉴定,单位工程质量符合规范要求,工程质量优良,验收通过。
5 结论
通过分析实际完工项目可知,在实际施工情况下挖泥船的选择和质量控制对工程的进度及质量十分重要, 应制定合理的施工方案并严格落实,还要不断优化各项施工技术;为减少疏浚施工对其他船舶的干扰和影响,要做好施工船舶之间的避让以及施工船舶与进出港船舶之间的避让等,这是今后的航道建设施工中重要环节,对工程的安全管控和经济效益十分重要。 本工程进一步完善港区航道公共基础设施条件,提升航道通航水平,满足港区进出港船舶大型化、专业化通航需求,保障船舶通航安全,改善进出港船舶的通航环境,助力港口城市建设,提升营商环境,更好地服务当地经济发展。
猜你喜欢
工友(2023年4期)2023-04-21 08:02:52
珠江水运(2021年20期)2021-12-09 07:17:54
智能城市(2021年1期)2021-01-29 01:27:04
中国水运(2020年7期)2020-11-06 05:53:05
水运管理(2020年6期)2020-07-06 16:39:10
河南科技(2019年2期)2019-09-10 07:22:44
中国设备工程(2019年6期)2019-04-26 02:39:54
发明与创新·大科技(2016年11期)2016-11-19 02:32:00
中国港湾建设(2014年12期)2014-12-18 11:19:52
世界海运(2014年5期)2014-03-06 08:27:50