基于隧道交通安全系统的电路优化
2022-02-19 11:37侯俊涛杨艳
电子测试 2022年1期
侯俊涛,杨艳
(攀枝花学院智能制造学院,四川攀枝花,617000)
0 引言
我国中西部地区因为地理条件的缘故,隧道在基础公路运输中过程中起着至关紧要的作用。但同时因为中西部偏远地区经济条件不优渥,因此导致了基本交通照明设施的落后,甚至有的地区隧道控制电路仍然采用老式的传统闸刀电路,存在无车状态下开启隧道灯光、隧道口处灯光亮度不足等交通安全和资源浪费问题,这不仅导致交通事故的频发,同时也增加了经济负担,与现代智能交通安全、节能、减排的基本理念是背道而驰的。
1 隧道照明要求和控制原理
1.1 隧道照明要求
此次设计要求主要采用led隧道灯,由于隧道特有的封闭结构,驾驶员在进入和驶出隧道时因为“黑洞”、“白洞”效应带来了短暂的失明。因此为了减缓甚至避免这种效应带来的道路安全隐患,本文将针对整个隧道的灯光设计进行一些科学、合理的优化,给隧道交通安全和社会带来一定的收益和保障。
最主要的目的就是解决“黑洞”和“白洞”效应带给驾驶员的影响,“黑洞”和白洞效应的产生主要来自于外界光线强度的急剧变化,隧道具有独特的封闭结构,导致了隧道内外的亮度差,驾驶员在短时间内遭遇外界光线强度的急剧变化导致了“黑洞”和“白洞”效应的产生,在这种环境下,驾驶员由于看不清前方的道路状况,对于本身来说,这无疑时致命的,为此我们将整个隧道分为三个部分,一个内室,以及两个监控区域,(如图1)监控区域存在线圈,当监控区域存在车辆,则系统通过交通指示灯进行反馈,用于提醒驾驶员前方的道路状况。
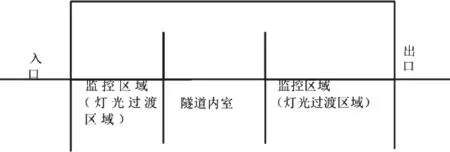
图1 隧道纵向剖面图
在中长型隧道中,内室的长度更长,若将整个隧道的led灯全部统一功率规格,使得整个隧道处于一个高亮度的状态中,相对应的维护和运行成本随之升高,同时也不符合系统的节能主旨,因此本文将靠近隧道出入口处的隧道灯安装改造为功率高且密集,隧道内室则功率低且稀疏,使得隧道整体亮度变化如图2所示,给驾驶员一个缓慢变化的视线适应过程,减少由于亮度、气温等外部因素给驾驶员带来的影响,从而降低隧道口处的事故发生率。
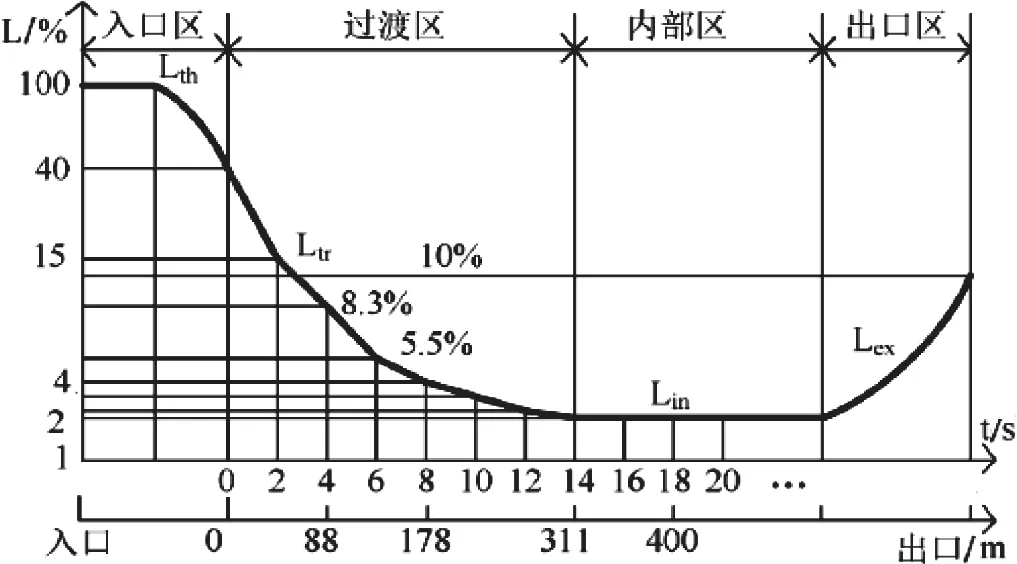
图2 隧道照明亮度曲线取自(交通隧道LED照明智能控制系统研究张德钱)
1.2 控制原理
相比于传统的开关控制电路,本文探讨的是一种新型智能化自动控制开关,原理为两个计数器进行数据比对,当二者数值相等时控制隧道灯光电路处于关闭状态,同时将数据上传数据库,得到即时的道路车辆通行数据。图5为计数器的原理构造,为了让计数器能够达到准确计数的目的,此外本文将铺设线圈作为计数器1的触发器,将触电产生的电流与计数器连通,从而达到每经过一辆车,计数器1产生增值的效果,并与计数器2进行比对,最终达到车辆数据对比来控制隧道灯光电路的效果,以此来解决在无车条件下灯光资源浪费的问题。
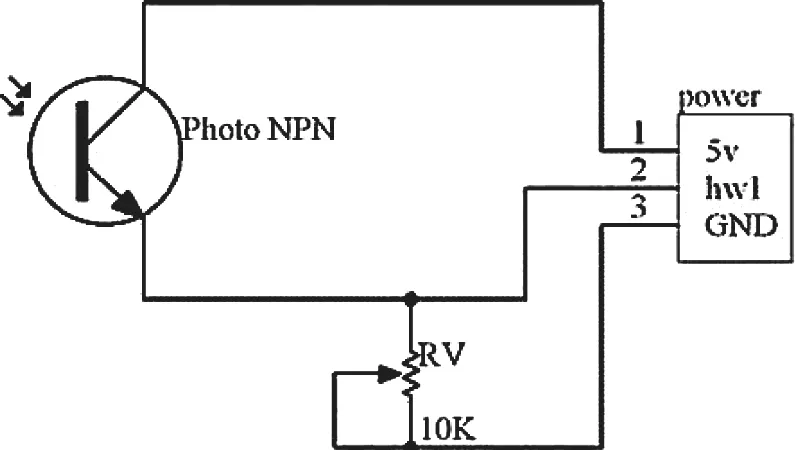
图3 单片机内部计数器原理构造图
传统的隧道电路采用闸刀等开关方法来控制灯光,过于死板和固定,即使在无车辆的状态下也无法关闭灯光电路,浪费了大量的电力资源,因此本文针对此类现象使用双计数器控制电路,极大的减少电力资源的支出和浪费。
1.3 针对数据对比延误的问题的措施
本文采用的控制电路主体由逻辑门电路和稳压电源电路组成,由于系统采用双计数器对比数据控制电路的结构,故而存在着一定的时间延误,可能导致系统工作缓慢等情况的出现,增大车辆驶入隧道的安全风险因此本文在电路中加入一个超前进位加法器,以此来减少系统的工作反应时间。使用超前进位加法器来减少整个系统的数据对比和运作的时间,使得隧道灯光灯光能够在车辆进入入口之前的安全距离就能正常打开,从而使车辆能够安全进入隧道。
2 数据控制和电路布局
2.1 数据对比控制电路
本文针对电路的具体控制采用PLC可编程控制技术,将计算机技术、自动控制技术以及通信技术实现融合一体化,最终来控制整个灯光电路。
当车辆经过感应线圈后,计数1器发生增值,将数据传至计数器2处进行比对,输入两个计数器的数据至逻辑电路中,最终将结果输出复制为两份,一份保存至寄存器用于上传数据库,使得整个交通系统达到实时的数据,另一份则转换至控制电路,通过PLC可编成控制技术来控制系统灯光的开启;同理,若计数器2发生增值,则判定为是否关闭灯光,若计数器1、2在一定时间内并未相等且长时间无变化,此时将判定为意外状态,根据实际情况来进行电路的控制。
将计数器1、2的数据输入数值比较器中,进行逻辑门“与或非”的对比,采用的数值比较器的基本组成为74LS85逻辑板块,当数据经过74LS85逻辑电路模块的输出后,将此信号数据转换成命令,进行下一步处理,以此来控制整个隧道电路的运转,达到自动控制灯光和智能交通的目的。
2.2 意外情况的判定和电路布局
当长时间内计数器1和计数器2数据不等且无变化时,则说明隧道内部此时出现了意外情况,隧道内存在车辆长时间未离开车辆,此时应当继续打开灯光,控制交通指示灯变为警戒色,提示驾驶员隧道道路状况存在意外情况,同时将此信息上传至数据库,再由数据库反馈给汽车,使得驾驶员得到前方隧道道路的大致情况,并通过隧道口的信号指示灯来进行预防。若长时间内一直为此情况,此时系统开启自我检测模式,检查系统自身的运转情况,检测是否为系统故障,最终将系统自我检测数据和道路数据一同上传,使得数据库发现异常状况,并作出相应的措施(派出维修人员前去检测维修等)。
例如,隧道路段的最低限速为60码,全长12公里,则正常状况下12分钟即可从出口处离开隧道,计数器2的数值也会产生增值状况。当数据不等且无变化状态超过总时长的20%不超过30%时将隧道内的道路状况判定为“前方道路状况不明,可能存在意外情况”,当超过30%时将判定为“前方道路出现意外事故”。以上两种情况都将通过改变交通信号的的颜色来对司机进行警示,并将其上传数据库,更新实时数据,以此统计各阶段的情况占总交通量的百分比,可作为科研调查的数据。
由图4可知,优化前的隧道电路运转模式趋于手动化,同时还要根据不同的时间段,人为去控制电路灯光的模式,过于浪费资源,受外部影响较大,因此图5在图4的基础上对运转模式进行了数据集中化和减少电力能源支出的优化,使得隧道电路在原先安全的基础之上增加了节能和自动化的特点。
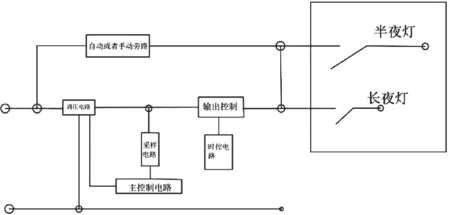
图4 优化前的隧道电路运转模式

图5 优化后的隧道电路运行模式
3 与无人驾驶技术的联络
目前在无人驾驶技术研发阶段,采用的技术尚未成熟,但随着科技和现代化智能交通的不断发展,无人驾驶技术必然会是大势所趋。在未来,随着汽车无人驾驶技术的不断成熟,交通道路实时数据和无人行驶一体化时必然的,在交通道路行驶的过程中,无人驾驶系统得到有数据库发来的信息,能够准确高效的得到前方的道路状况,从而规划出最佳路线和最保险的措施,使得驾驶员免于遭受人身财产安全的同时,提高道路的出行效率,真正意义上达到智能交通出行的目的。
就目前看来,无人驾驶技术实行之后采取的道路状况识别方法是通过红外感应或者视频图像来反馈给数据处理中心,再将驾驶指令反馈给行驶车辆。那么在进出隧道的一时刻,由于亮度、隧道内外紫外线、气温等多方面的急剧变化,必然也会出现许多的问题,例如传感器失灵、无人驾驶系统无法识别前方道路状况等等,势必会对正常行驶的无人驾驶汽车的行进和判断造成极大的干扰,甚至出现交通流滞停、交通事故的情况,这些与无人驾驶技术及智能化交通的初心都是不符合的,为此我们应当减少此类情况的发生。
故而,我们将整个系统得到的道路实时数据上传到数据库中,数据包括监控区域的状况、隧道内的车辆数量等等。在无人驾驶汽车靠近隧道入口时,将会与数据库产生数据共享链接,汽车的智能控制系统将从数据库中得到前方隧道的所有道路数据,再由智能控制系统分析数据后做出相对应的指令来控制汽车的行进状态,减少不必要的交通滞留问题。当无人驾驶汽车出现意外情况时,将把滞留的位置、状况反馈给数据库,将整个意外情况的信息公开,使得后面行驶的无人驾驶汽车得到准确的位置信息,做出及时、合理的选择和命令,最大限度上减少因为意外事故给道路交通带来的不良影响,同时如果意外状况过于严重,通过汽车系统数据的上传,数据库可以及时的启动报警指令,在第一时间抢救驾驶员的生命和财产安全,使得道路交通智能交通发展在无人驾驶技术时代在安全和事故处理方面得到充分的保障,为日后无人驾驶技术在各方面的应用提供一个后勤和安全模板,减少无人驾驶技术在未来的信息化时代的难题。
4 结束语
使用计数器、数值比较器、以及PLC控制技术对整个隧道电路进行改造,达到安全、节能、收集实时交通数据和实现自动、智能化交通的目的,有效改善了老式隧道电路浪费高、节能低,隧道安全性差的现象,同时实现了对整个隧道电路的集中控制和数据采集上传,并对未来的交通出行模式和交通基础设施进行模拟和期望,对无人驾驶技术在隧道方面的可能出现的交通问题提出有效的解决方案,为交通智能现代化献出绵薄之力。
猜你喜欢
作文小学中年级(2022年9期)2022-09-08
煤气与热力(2022年2期)2022-03-09
心声歌刊(2021年4期)2021-10-13
小哥白尼(神奇星球)(2020年6期)2021-01-18
科学(2020年3期)2020-11-26
科学咨询(2020年36期)2020-09-10
小哥白尼(军事科学)(2020年8期)2020-05-22
科技创新与应用(2016年7期)2016-10-21
小猕猴学习画刊(2016年6期)2016-05-14
海外英语(2013年11期)2014-02-11