
近海底高分辨率地震探测系统设计与实现
2022-02-19 09:12:44裴彦良温明明刘保华张连成于凯本魏峥嵘连艳红闫克平
海洋科学进展 2022年1期
裴彦良,温明明,刘保华,张连成,于凯本,魏峥嵘,宗 乐,连艳红,闫克平
(1.自然资源部 第一海洋研究所,山东 青岛 266061;2.广州海洋地质调查局,广东 广州 510000;3.青岛海洋科学与技术试点国家实验室 海洋地质过程与环境功能实验室,山东 青岛 266061;4.国家深海基地管理中心,山东 青岛 266237;5.浙江大学 化学工程与生物工程学院,浙江 杭州 310027;6.浙江理工大学 流体传输技术国家地方联合工程实验室,浙江 杭州 310018;7.西安虹陆洋机电设备有限公司,陕西 西安 710100)
天然气水合物是有望成为替代常规油气的清洁能源。天然气水合物广泛分布于全球海洋中,发育区域的水深一般在1 000 m以上,埋深大多不超过300 m。水合物层厚度小于10 m的情况占很大比例,有的甚至不足1 m[1-2]。我国科学家经过十多年的地质地球物理综合调查,取得了天然气水合物勘探、开发的重大突破。随着我国主要海域的水合物资源勘查逐步进入详查和试开采阶段,对海底水合物矿体空间分布的探查精度要求显著提高。天然气水合物沉积层的横向展布范围差异巨大,层状水合物的横向延展可达数千米,而分散状水合物、斑块状水合物的横向范围则小很多,甚至不足1 m[3-4]。由于天然气水合物矿床产状多样、发育地质条件复杂、垂向厚度有限和横向分布不均匀,导致传统地震资料难以满足水合物勘探需求[5]。国外采用多道、三维、深拖等多种方法联合作业,综合解释区域地质构造特征,对水合物进行详细的地球物理研究[6-9]。在国家重点研发计划支持下,我国“十三五”期间开展了“近海底高精度水合物探测技术”“天然气水合物高分辨率三维地震探测技术”等项目的研究工作,本文内容基于“近海底高精度水合物探测技术”项目开展研究。
1 系统总体设计
近海底地震探测技术是将震源和接收缆均置于近海底拖曳,进而提高地层分辨率的地质探测方法。在海底高静压环境下,气枪等震源不能用于近海底激发。国外成功的近海底地震探测系统,包括美国的DTAG系统和法国的SYSIF系统[8-10],均采用赫姆霍兹共振腔作为深拖震源,本项目则采用等离子体震源作为深拖震源。此外,深拖接收缆的采集和控制亦均集成于海底拖体上,也是本项目需要攻克的关键技术难点。
1.1 深拖震源系统
1.1.1 主频
震源系统的子波波长(λ)直接决定了地震采集系统的分辨率,其中包括纵向分辨率(Rz)和横向分辨率(Rh):

式中,h为震源与探测地层间的距离。可见,纵向分辨率主要取决于震源主频,主频高于200 Hz即可满足优于2 m的分辨率要求;而横向分辨率则要考虑拖曳高度和频率两方面的因素。若在距海底高度100 m拖曳,达到10 m的横向分辨率,则要求震源主频要达到750 Hz以上。而在相同主频条件下,常规海面拖曳地震探测系统的横向分辨率则仅有45 m,明显低于深拖地震系统,如图1所示。为此,将深拖等离子体震源的主频指标定为400~1 400 Hz,可以提供优于10 m的横向分辨率。
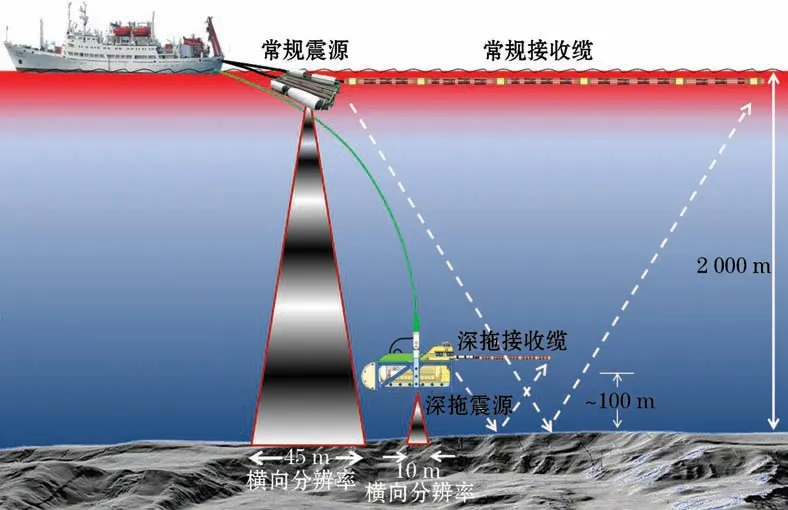
图1 近海底地震探测系统与常规海面拖曳地震探测系统横向分辨率对比Fig.1 Comparison of lateral resolution between conventional and deep-towed seismic systems
1.1.2 能量
根据主动声呐方程[11-12]:

式中:SL为声源级、DI为声源指向性、GS为接收缆空间增益、GT为接收缆时间增益、DT为检测阈,这些都是由震源系统决定的参数;H水为拖曳高度,H地为海底地层穿透深度[12],20lg[2(H水+H地)]为声波球面扩展传播损失;2αH地为海底地层吸收损失,α为信号带宽内海底的平均声衰减(dB/m),α=β/λ0,其中λ0为震源中心频率波长,β为海底地层吸收系数,β约为0.2 dB/λ0;RL为待测界面反射强度,取决于被探测目标,约为-20 dB[13-14];NL为海洋环境噪声级,取决于环境,海面设为100 dB,深海为40 dB。设DI=3 dB;GT=3 dB;接收缆为48道,则GS=17 dB;DT=6 dB[15-16];(NL-DI-GS-GT)表征声呐系统的工作环境及自身特性。
可以看出,海底地层吸收损失2αH地与震源中心频率密切相关,导致震源中心频率越高,震源达到同等穿透效果所需声源级越大。设震源中心频率为750 Hz,则500 m海底地层吸收损失为100 dB,深拖震源所需声源级为≥205 d B。
由于地层吸收衰减与频率、水深、地层深度的关系复杂,缺少实际测量数据支持,所以只能根据前人的声反演结果做出大致推测:将等离子体震源主频范围拟定为(750±250)Hz,震源声源级应≥210 dB。
1.2 深拖接收系统
1.2.1 道间距
道间距与横向分辨率密切相关,理论上可以从偏移时间剖面上分辨地下尺度大于半个道间距的地质体。此外,道间距大小决定了空间域采样间隔,空间域采样间隔过大,会造成空间假频,影响剖面质量[17]。常规多道地震仪的道间距一般为12.5 m或更大,因此,在高分辨率地震勘探中,为提高地震记录的横向分辨率,应选择较小的道间距[18],本研究将道间距选定为3.125 m。
1.2.2 排列长度
近年来,AVO技术在天然气水合物勘探中发挥着越来越重要的作用[19-20]。叠前AVO反演精度的提高需要保证较好的入射角度范围,入射角范围窄会给地震反演,尤其是叠前反演带来困难。相较于常规海面拖曳地震勘探系统,深拖地震探测系统可以用较短的拖缆排列长度达到较好的入射角度范围,为地震数据精准反演提供数据基础。由图2可知,震源激发点S与接收点R的距离的一半为h0,拖曳高度为Z,地震入射角为γ,则:

图2 常规拖曳与深拖地震观测系统反射角与排列长度对比示意图Fig.2 Comparison of the reflection angles and array lengths between conventional and deep-towed seismic systems

当拖曳高度Z=100 m时,反射角γ=30°和γ=40°时对应的排列长度分别为115和168 m。因此,为了能够进行AVO反演,深拖地震勘探系统排列长度不能小于115 m。本系统设计研制的地震接收缆有效排列长度为150 m,当以100 m高度拖曳时最大反射角约37°,优于美国DTAG深拖系统(拖曳高度300 m,最大反射角36°)和法国SYSIF深拖地震系统(拖曳高度100 m,最大发射角30°),能够得到更好的AVO反演效果。
1.2.3 采样率
震源特性对采集系统提出了不同的要求,例如由于气枪震源等常规震源主频低,采集系统设计的最大采样率一般为4 k Hz。而本系统深拖震源的主频高,本采集系统最大采样率设定值高达16 k Hz。此外,较高的主频和较小的采样间隔不仅可以提高地震分辨率,而且可以弥补短排列的缺陷,从而提高速度分析的精度,更好地满足天然气水合物勘探的需求[21]。
本设计与国外主要深拖系统(美国DTAG系统和法国SYSIF系统)的技术指标对比如表1所示。表中对比了震源系统和接收采集系统的主要技术指标,可见本系统在声源级、采样率等指标方面有较大优势,在频带和排列长度等指标方面与国外系统相当,虽在作业深度方面与国外系统仍有较大差距,但可以满足绝大多数海域天然气水合物调查工作需求。下面就深拖震源和深拖接收系统关键技术设计进行论述。

表1 本设计与国外主要深拖系统的技术参数对比Table 1 Specifications of the domestic and foreign deep-towed seismic systems
2 深拖震源系统关键技术
深拖地震系统的设计工作水深为2 000 m,克服超高静压对等离子体震源发射阵的影响是深拖震源研发的主要技术挑战。水静压对发射阵的电学特性几乎没有影响,但对发射阵放电激发产生的气泡脉动和声脉冲辐射影响较大,主要表现为发射声波基频升高和幅值降低[22-24]。因此,本研究设计了一套耐压透声发射阵,可在2 000 m水深超高静压环境下实现震源有效激发。
2.1 耐压透声舱材料选择
为实现在2 000 m水深超高静压环境下震源的有效激发,承载震源发射阵的容器需要兼具耐压和透声特性。应用于海洋深水条件下的耐压容器多采用不锈钢或者钛合金材料,耐压性能好,但透声性很差;应用于海洋地质勘探的透声材料一般包括橡胶、聚氨酯等,水听器和换能器等都应用到这类材料,然而这类材料透声性好,但刚性很差,不能用于制作耐压容器。碳纤维材料透声性能好,强度高,具有耐腐蚀和高模量等特点。然而,碳纤维材料的耐冲击性较差,进行开孔、焊接等机械加工难度大。因此,耐压透声舱的舱壁主体采用碳纤维材料,两侧端盖使用不锈钢材料。碳纤维材料的舱体可以有效抵御外部深层海水静压力,并能将内部声波能量辐射出去。
2.2 发射阵结构设计
耐压舱抵御了外层海水的高静压力,舱内保持了常压条件。但等离子体震源发射阵激发的原理是利用强电场和脉冲电流使海水局部气化产生气泡,利用气泡膨胀、收缩的过程向外辐射脉冲声波。由于碳舱内灌装的海水基本不可压缩,若无减压增容措施,多电极放电将导致碳舱内压瞬间急剧抬升,气泡膨胀将受到抑制,进而导致声波能量的衰弱。为此,为发射阵设计了气体缓冲舱,缓冲舱位于碳舱顶部并与碳舱连通(图3)。单电极产生气泡的直径随激发能量提高而增加,本系统每个电极平均最大能量约7.5 J,常压环境下产生的气泡最大膨胀半径约8 mm[25],单子阵(包含198根电极)产生气泡的总体积约450 m L。震源未激发时气体舱内为常压环境,震源激发期间产生的气泡总体积将挤压缓冲舱内原有气体体积,为提高缓冲作用,舱容积应远大于气泡总体积的5~10倍为宜。

图3 深拖震源及其发射阵外形结构Fig.3 Structural design for deep-towed seismic source
在震源激发瞬间,缓冲舱将提供由于气泡膨胀所需的额外体积需求。由于震源激发产生的气泡寿命很短,常压下约2.6 ms[26],因此需要在极短的时间内将碳舱内的海水排到缓冲舱暂存。为此,碳舱与缓冲舱之间的连通管道需要能够提供足够大的流量,才能起到缓解瞬时内压的作用。我们分别对连通管道不同的直径取值进行了模型仿真,仿真结果见图4。由图4可知,在直径为30 mm时,碳纤维舱体内部压力将达到21 MPa,基本没有起到缓解内压的作用;而直径为70 mm时,内部压力仅有0.7 MPa。因此,设计采用的连通管道直径为70 mm,使内部压力维持在1 MPa以下,有效降低了内压对子波的影响。

图4 不同连通管径对缓解碳舱瞬时内压作用的对比Fig.4 Comparison of effects of different pipe diameters on relieving instantaneous internal pressure of carbon tank
3 深拖接收系统关键技术
常规近海面多道地震接收系统一般包括多道拖曳电缆和室内终端控制平台两部分[27]。而深拖多道地震接收系统则还包括一套水下控制中心,这一点是与常规近海面地震探测系统最主要的区别。水下控制中心(Operation Control Center,OCC)是深拖地震水下设备的核心,主要由双核ARM处理器与FPGA构成的SoC片上系统组成,关键功能在于控制深拖震源定距激发和实时连续记录地震数据,兼顾水下设备深度、高度等状态信息的转发。室内终端控制平台功能被弱化,仅用于参数的设置、地震数据的监视和水下设备状态信息的监视。
3.1 震源激发控制
OCC接收室内终端控制平台下发的定位系统NMEA导航数据,ARM处理器负责语句解析,FPGA根据语句解析结果和震源激发参数(炮间距)自主计算震源激发时刻。在每个激发时刻,FPGA发出触发信号给震源和ARM,震源激发地震波,ARM记录炮时文件,震源激发控制具体信息流如图5所示。在此图中亦示出了深度计、高度计数据经由光电复合缆上传至室内终端控制平台的信息流及深拖震源与震源监控主机间的命令与状态信息流。

图5 震源激发控制信息流示意图Fig.5 Schematic diagram of seismic source trigger control information flow
3.2 地震数据连续记录
深拖多道地震数据由拖缆上传至OCC后,由OCC对数据进行连续不间断记录。由于深拖地震水下设备无授时秒脉冲(每秒脉冲数为1)信号,不能进行实时时钟校正,如何实现地震数据时钟与震源激发时钟的精确同步是本技术的难点。为解决此问题,设计OCC内部的FPGA接收到拖缆地震数据后,对每一个数据点写激发标志位,然后发给ARM进行编排封装。FPGA根据RMC解析结果计算炮点激发时刻,在相应的炮点时刻输出TTL触发脉信号控制深拖震源激发,并对当前地震数据点的激发标志位置位。ARM检查数据点的激发标志位,当检测到标志位为“1”时,将当前数据点序号写入炮时文件,实现激发时刻数据点号的准确记录。地震数据连续记录具体信息流如图6所示,图中亦示出了地震采集设置命令下发的信息流和地震数据水下存储和室内备份存储的信息流。

图6 地震数据连续记录信息流示意图Fig.6 Schematic diagram of continuous recording information flow
4 系统深海测试
深拖地震设备样机于2019年完成集成和调试,并将其命名为“揆洋”号,以纪念自然资源部第一海洋研究所地球物理学家王揆洋研究员。2019年10月对“揆洋”号深拖地震系统在我国南海进行了深海试验[28](图7),试验海区位于琼东南海域(图8),海底地形平缓。处理后得到的深拖多道地震叠加剖面如图9所示。

图7 “揆洋”号深拖地震系统海试外业Fig.7 Photo of Kuiyangdeep-towed seismic system
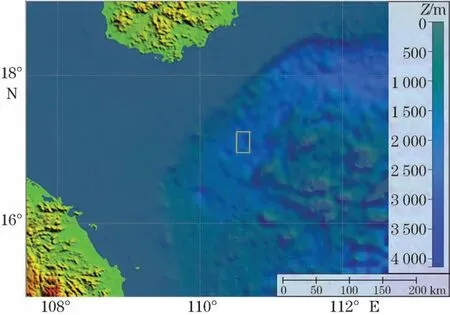
图8 “揆洋”号深拖地震系统海试区域位置Fig.8 Location of the sea trial area of the Kuiyangdeep-towed seismic system

图9 “揆洋”号深拖地震系统海试地震剖面Fig.9 Seismic profile of the sea trial of the Kuiyangdeep-towed seismic system
试验中震源激发能量设置为3 000 J,激发炮间距6.25 m,最小炮检距12.5 m。最大拖曳深度为2 025 m,拖体离底高度保持在90~110 m,拖曳速度保持在2~3 kn。由处理后的深拖多道地震叠加剖面结果(图9)可知,地层穿透深度最大可达双程时380 ms,从叠加结果对比单道剖面可以看出系统探测时间上达到了约350 ms(双程时)。叠加剖面海底以下50 ms内同相轴连续性好,波阻清晰;此外叠加剖面中存在多处绕射现象,可能为断层等不连续构造或褶皱(黄色圈);有可能有小规模气烟囱(红色三角),在2 415 ms处可能有似海底反射层(Bottom Simulating Reflectors,BSR)特征。可见频带范围为200~2 400 Hz,主频约1 000 Hz。叠加剖面显示了纵向分辨率<1 m及横向分辨率<10 m的高分辨率特点,基本达到了预期效果。
5 结 语
本文针对我国深水海域天然气水合物等新资源精细调查需求,设计了一套近海底高分辨率地震探测系统。不同于国外类似设备设计,该系统采用深拖型等离子体震源激发地震波。耐压透声发射阵以碳纤维材料为主体,可抵御20 MPa外部高静压,独特的缓冲舱结构使发射阵内压维持在1 MPa以下,这些技术使得深拖等离子体震源具有高声源级(214 dB),宽频带(200~2 400 Hz)的特点。接收系统方面,FPGA和ARM相结合的水下控制器实现了震源的定距激发控制和地震数据的连续记录,提高了系统作业效率。深海试验结果表明,系统具备了在2 000 m水深环境下近海底地震作业的能力,穿透深度和分辨率等指标基本满足我国海域水合物探测需求。
猜你喜欢
西南石油大学学报(自然科学版)(2021年3期)2021-07-16 05:27:08
数学物理学报(2019年3期)2019-07-23 01:15:40
西南石油大学学报(自然科学版)(2018年6期)2018-12-26 01:00:14
家庭影院技术(2018年9期)2018-11-02 05:31:32
中国资源综合利用(2017年4期)2018-01-22 02:46:57
知识经济·中国直销(2017年11期)2017-11-28 05:34:18
河北地质(2017年2期)2017-08-16 03:17:10
自动化学报(2017年5期)2017-05-14 06:20:52
成都信息工程大学学报(2017年6期)2017-03-16 03:04:32
华北地质(2015年3期)2015-12-04 06:13:25
