基于萤火虫算法的预警机配置优化模型研究∗
2022-02-18 09:02:56张佳琦
舰船电子工程 2022年11期
张佳琦 曹 毅
(国防大学联合作战学院 北京 100091)
1 引言
穿透性制空作战(Penetrating Counter Air,PCA)是美军针对反介入/区域拒止体系(A2/AD)而提出的作战概念,首次出现在由美国2030年空中优势事业能力合作小组出台的《2030年空中优势飞行规划》文件[1],当前研究[2~3]对穿透性制空的主要观点是通过发展以PCA战机等高隐身性平台为核心的空中力量系统簇遂行攻势行动,对高威胁环境进行局部的持续穿透,重点打击纵深高价值目标,消耗对手战争潜力从而削弱A2/AD能力保持自身空中优势。在应对穿透性制空上,文献[4~5]指出集中隐身资产是穿透性制空的主要特点,高隐身性降低了陆基平台的打击效率,必须依托航空兵的灵活机动和攻防兼备的特征,在远离本土的空中作战中以机动对机动,以进攻对进攻。
整体上看,应对穿透性制空作战的本质是反隐身作战,其首要任务是预警探测。以预警机为核心的空基预警探测力量是反隐身预警探测的延伸,在对PCA战机等高隐身目标的发现识别上将发挥重大作用。预警机是空中力量的倍增器,具备机载雷达探测的空基优势、中高空远程巡航的机动优势和生成空中体系作战能力的集成优势[6]。当前对于预警机空域配置问题的研究已有丰富的文献资料,大量研究聚焦在不同巡逻航线下预警机探测区域的计算问题[7~10]和多预警机协同探测问题[11~13]上,基于特定作战背景的研究较少。
本文立足于穿透性制空作战背景,研究了应对穿透性制空作战下预警机的运用方式,着重考虑探测加油机,从而提出了预警机探测阵位配置的优化模型。
2 应对穿透性制空作战预警机的运用分析
2.1 加油机是实施穿透性制空作战的关键要素
穿透性打击编队主要以PCA战机、B-21轰炸机为代表的高端有人机平台与大量功能不同的无人机或无人机集群构成,从机场起飞后,需借助若干次空中加油来保障远距离奔袭和穿透行动。在美国智库战略预算与评估中心(CSBA)关于穿透性制空作战的兵棋推演[14]中,推演小组将KC-46A、KC-135等有人加油机活动区域设置拒止区域以外,这些大型加油机在空军基地和卸载空域之间来回穿梭,从空军基地补充燃料并在卸载空域将燃料输送给无人加油机。而无人加油机则进入拒止区域,在多个分散部署的空域为穿透性打击编队实施空中加油,以此提高加油机的生存性,并延长穿透性打击编队的航程和任务续航时间。图1展示了穿透性制空下的空中加油行动。

图1 穿透性制空作战中的加油行动
空中加油机保障其它航空兵作战的方式主要有三种:伴随式、会合式和空中等待式,作为高价值目标,加油机的活动空域通常需综合计算后确定。在穿透性行动中,通常采用空中等待式,即预先规划加油机等待空域,并采用分布式部署以提高生存能力和加油效率。因此加油机将在防区内外的空域中构设多个加油阵位。
2.2 预警机实施对加油机的防空警戒任务
作为空中力量体系的重要组成,预警机在应对穿透性制空作战中主要有两方面的作战任务:1)配置在敌主要威胁方向的指定空域内,实施预警探测,重点探测隐身战机,增加反隐身探测体系对高隐身目标的发现概率,也可重点监视保障飞机,特别是监视加油机等高价值目标的活动。2)指挥引导己方截击航空兵对来袭目标实施拦截。
预警机在探测隐身战机特别是高空突防的敌机时,优势并不明显,对加油机的监视反而能更好地掌握空情信息。依托无线电技术侦察情报的信息支援以及天波超视距雷达对隐身目标的概略探测,可以初步判定敌主要来袭方向和加油机活动空域。在保证自身安全的情况下,预警机巡逻空域应尽量靠前,可采用沿边境线巡逻或设置巡逻空域的方式,巡逻航线的长边应该与敌主要来袭方向垂直。作为空中高价值目标,预警机需部署在敌方打击安全线之外,打击安全线通常由敌防空武器范围、敌机速度和其机载武器最大射程等综合确定。多架预警机按一定的间隔进行线状部署,可以构成有较大宽度和一定纵深的空基雷达网,从而形成能够覆盖多个点状区域的预警带,更好地完成警戒监视任务,如图2所示。
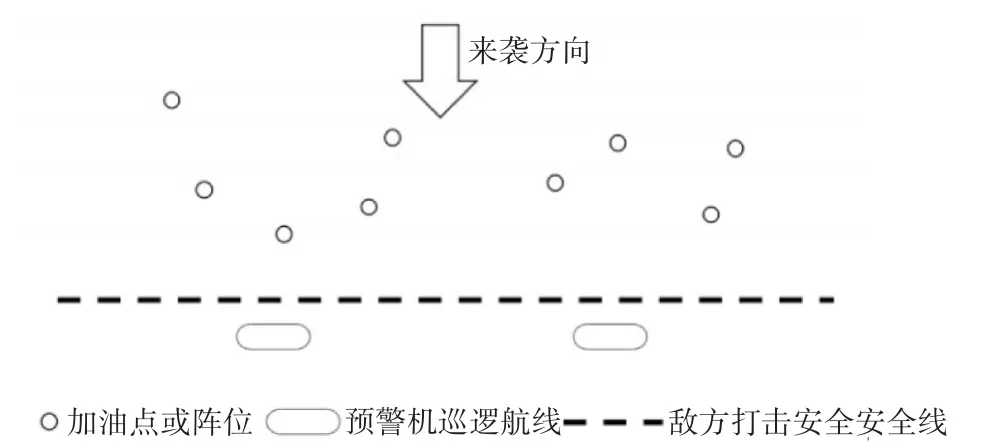
图2 预警机对多个加油阵位的探测示意图
在战斗机护航下,预警机可适时前出实施大区域空中警戒巡逻,以增加预警时间,进一步完善反隐身探测体系。若发展并列装无人预警机,则前出距离和前出时机的可选择性将会更大。
3 基于萤火虫算法的预警机配置优化模型
3.1 模型假设
本文重点考虑预警机对多个空中加油阵位的预警探测问题,给出如下基本假设:
1)预警机是全方位扫描型,采用跑道形巡逻航线且直飞航线垂直于敌来袭方向。
2)敌方有多个无人加油机空中加油阵位,通常加油高度层一定,假设其空中加油阵位都处在同一高度,并简化为点状目标。
3)假设敌方打击安全线为直线,并假设已经计算确定了预警机巡逻航线中心位置处在垂直于敌来袭方向的某条直线CL上,CL线位于打击安全线己方一侧。
4)预警机的探测区域可分为总覆盖区、强效区、弱效区和探测盲区,由于隐身飞机具备高机动性和较小的雷达反射截面积,因此仅关注强效区。
3.2 预警机配置优化模型
1)首先考虑单架预警机探测的配置问题。
设预警机在目标所在高度上的最大探测距离为R,航线长边长度为L,转弯半径为r,单位均为千米。以CL线为x轴,任取其上一点为原点,来袭方向为 y轴建立坐标系,巡逻空域中心点位置Oc(xc,0),则航线左右转弯圆心坐标分别为
在不引起歧义的情况下,不区分中心点、左右顶点的记号和它们的横坐标,此时图3中虚线为预警机强效区的边界,强效区是预警机在巡逻航线上任意位置均可探测覆盖的区域,是以巡逻航线上的各航迹点为中心、以载机雷达探测距离为半径的所有曲线围成图形的交集,其包络方程是以 p1和 p2为圆心,半径均为R−r的两个圆的交集,在该坐标系下为分段函数:
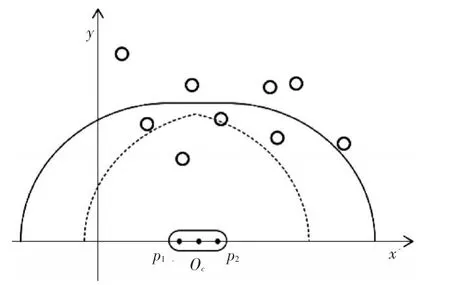
图3 单预警机探测模型

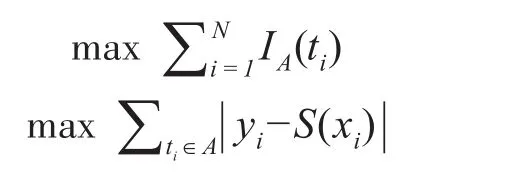
假设已通过概略反隐探测到N个空中加油点位,其位置记为ti=(xi,yi),1≤x≤N,优化目标是确定Oc,使落入强效区的目标数量最多且点位尽可能远。“尽可能远”的是指点位尽可能靠近强效区的边界,体现尽早发现的要求。该多目标优化问题可以如下表述:
2)多预警机探测的配置模型
对于多预警机探测,可以引入先验条件简化问题,即认为多架预警机应保持一定的重叠区,令其巡逻空域的中心点间距取为定值D,而后可转化为单预警机的配置优化问题。
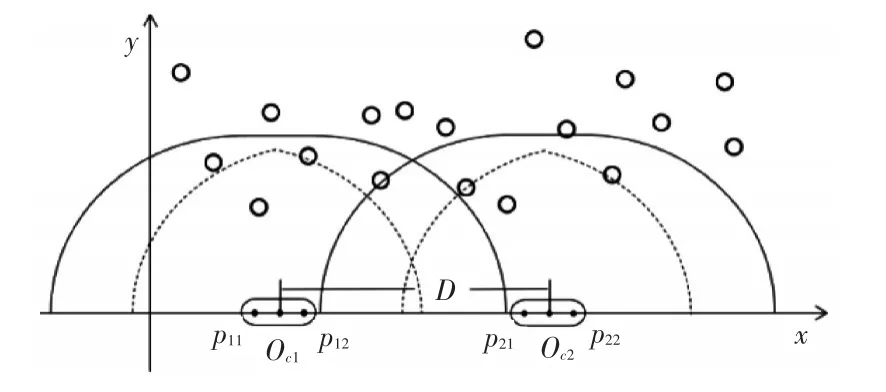
图4 多预警机探测模型
该优化问题可表述为
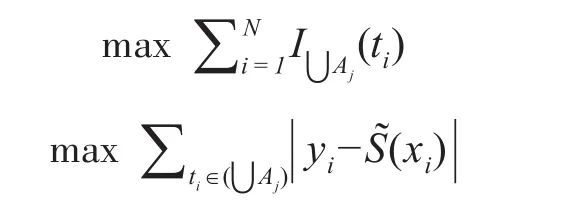
其中∪Aj是多架预警机强效区的并集,是多架预警机强效区边界的分段函数,与单预警机模型的区别在于强效区边界函数的确定依赖于参数D。实际中通常采用不同型号的预警机以弥补不同体制雷达的探测盲区,此时需对雷达探测范围等参数进行调整。
3.3 萤火虫算法优化求解
对于上述问题的目标函数,其预警机巡逻航线中心位置xc作为自变量出现在求和范围和分段函数自变量定义域区间之中,梯度下降等常规优化算法不适用,而较为适用以蚁群算法、粒子群算法为代表的群智能算法。本文选用群智能算法中的萤火虫算法[15]来加以求解,该算法由 Yang[16]提出。其仿生原理是萤火虫能够通过下腹发光器的生化反应发光进行信息交流,其数学描述主要涉及发光强度和吸引度。发光强度描述萤火虫所处位置的优劣并决定移动方向,吸引度决定移动距离。
萤火虫的发光强度通常定义为
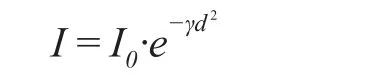
其中I0为自身亮度,与目标函数值有关,目标值越优,亮度越亮;γ为光强吸收系数,表示荧光会随着距离的增加和传播媒介的吸收逐渐减弱,可设置为常数;d为两个萤火虫之间的距离。在求解最大值的问题中,通常可以将发光强度取为目标函数值,即:

其中l是萤火虫的空间位置。
萤火虫的吸引度定义为

其中β0为最大吸引度,γ和d意义同上。
萤火虫位置更新公式如下:

其中li和lj是萤火虫i和j的空间位置,α是步长因子,ε为随机扰动。
图5给出了萤火虫算法的基本流程。

图5 萤火虫算法流程图
4 仿真实验分析
以单预警机探测模型为例,对于这种多目标优化问题,可转为单目标问题进行求解。考虑到目标个数N无量纲,而目标与强效区边界的距离的单位为km,因此可利用乘法来组合两个目标函数,结果如下:

单预警机采用跑道形巡逻航线时,长度通常在60km~90km,两线间隔20km~30km,取在目标所在高度的最大探测距离R为400km,航线长度L为60km,转弯半径r为15km,需要优化确定的是预警机巡逻航线中心位置xc,强效区的包络方程S()x可以确定为

落入强效区的横坐标范围A为 xc−370≤xi≤xc+370。假设在该坐标系下,有N=5个空中加油点位,其坐标分别如表1。
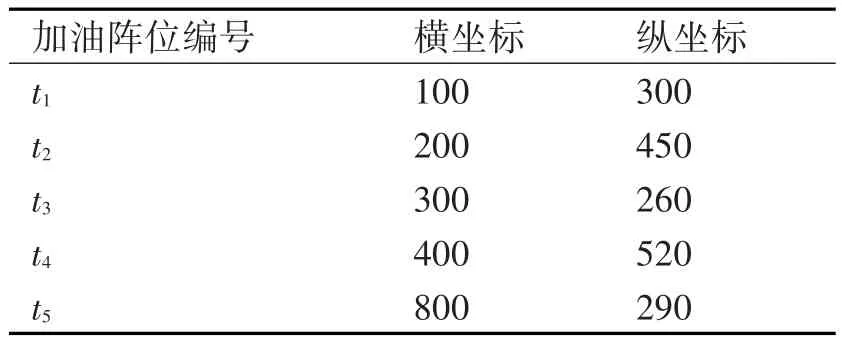
表1 空中加油点位坐标
利用Matlab对该目标函数离散化后绘制图像如图6。
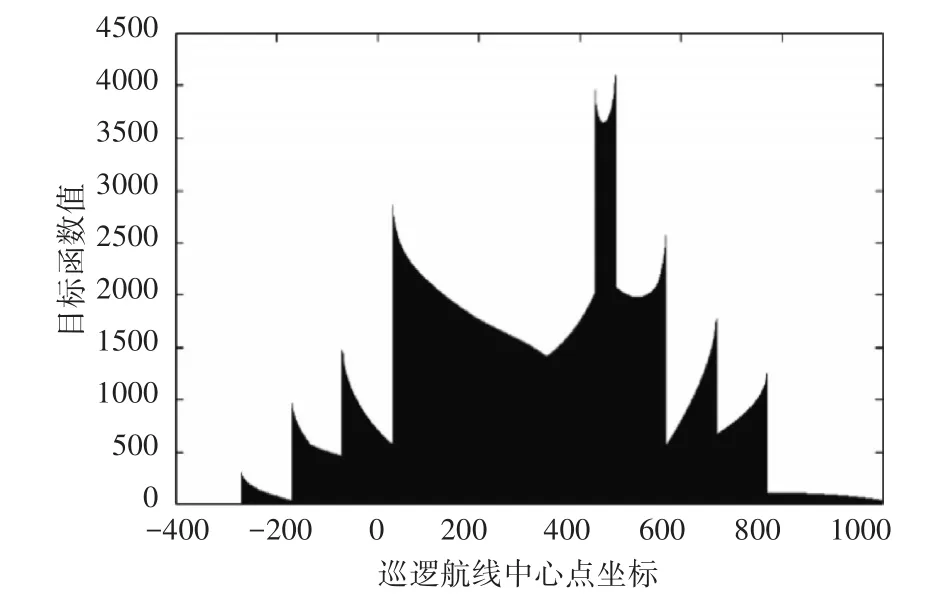
图6 目标函数图像
可以观察到,该函数图像不连续且有多个局部极值,优化算法容易陷入局部最优,但有全局的最大值。
通过Matlab编写萤火虫算法代码求解,设置萤火虫种群数量为20,光强吸收系数γ=0.01,步长因子α=0.1,终止条件通过设置最大迭代次数为5000来实现,得到的最优解xc=470,此时目标函数值达到最大4.1001×103。图7显示了萤火虫算法求解该问题的收敛性能,尽管曾陷入局部最优,但整体上其收敛速度较快。
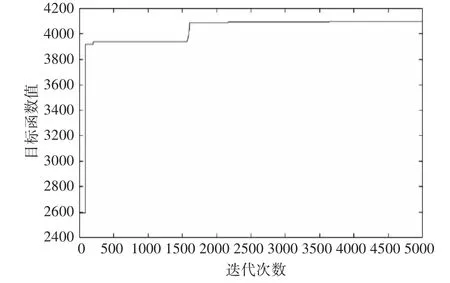
图7 萤火虫算法收敛曲线

图8 预警机最优配置方式
处于最优位置时,预警机强效区探测范围与加油阵位的相对位置关系如图8所示。从结果可以看出,加油阵位分布在强效区边缘,且都落入强效区横坐标范围内:1)对于探测范围之外的加油阵位,隐身飞机若按照既定航线将进入预警机强效区;2)对于探测范围之内的加油阵位,可以完全监视加油机和隐身飞机。
5 结语
穿透性制空以隐身突防为主要样式,难以发现和跟踪,但其并不是全过程隐身的。在空中加油阶段,可以前出预警机监视重点活动空域,极大地提高预警探测效能。进一步,若通过指挥控制引导我方隐身飞机前出攻击加油机则会直接令穿透性制空行动失能失效。本文提出的预警机配置模型更多地考虑了对分布式部署加油机的探测问题,通过萤火虫算法求解该优化问题较简便,具备一定实用价值,可为应对穿透性制空作战中预警机运用提供参考。
猜你喜欢
文萃报·周五版(2021年33期)2021-09-12 02:34:25
小哥白尼(军事科学)(2021年5期)2021-08-30 06:46:12
活力(2021年6期)2021-08-05 07:24:44
文萃报·周二版(2021年5期)2021-03-02 10:56:02
作文周刊·小学三年级版(2017年31期)2017-09-04 23:02:44
西南医科大学学报(2016年4期)2016-01-03 01:26:38
西南军医(2015年1期)2015-01-22 09:08:36
计算机工程(2014年6期)2014-02-28 01:26:09
河南科技(2014年23期)2014-02-27 14:19:03
舰船科学技术(2013年12期)2013-08-15 00:51:50