
医疗机器人领域科技发展水平现状与研究热点
2022-02-17 07:23:22叶佳慧
中华医学图书情报杂志 2022年7期
叶佳慧,许 鑫
进入21 世纪以后,受到技术不断迭代的冲击,传统的以人口、国土面积、军事能力为竞争依据的综合国力竞争局面逐渐向科技能力倾斜,科技创新能力不仅能帮助一个国家在特定领域占据优势地位,还能助推该国经济增长[1-2]。因此,各国都将创新发展作为发展强国的重要战略。建立科技能力评估体系,可以有效衡量一个国家在新兴技术领域的创新能力和管理水平,提供优化发展的数据支撑。医疗机器人作为“大科学”时代备受关注的交叉研究领域,近年来在临床医学和医学教学等各类场景都发挥了重要作用,受到各国高度重视。分析医疗机器人领域的研究热点,及时掌握领域内最新动向和发展趋势,在多学科融合的学术环境下明晰研究方向、拓展研究视野,对推动我国医疗机器人行业的良性发展有重要意义。
1 医疗机器人领域研究综述
医疗机器人也称为“医用机器人”(medical robot),是用于医疗或辅助医疗工作的智能型服务机器人。1985 年,Yik San Kowh 等人操作PUMA 机器人进行脑组织活检[3],机器人正式进入医疗行业,神经外科也步入机器人辅助手术时代。1988 年,伦敦帝国学院开发的世界上第一台正式的外科手术机器人PROBOT 问世[4]。1989 年,法国推出了神外手术机器人NeuroMate[5]。美国Integrated Surgical Systems 公司在1992 年推出了机器人ROCOBOT 并完成临床试验[6],这是全球第一个骨科机器人。此后美国接连推出AESOP、ZEUS、Da Vinci 等机器人[7-8],对世界医疗机器人领域的发展起到了巨大的推动作用。当前,Da Vinci 机器人依旧是全球最成功的手术机器人,超过60 万台Da Vinci 在各地进行手术。中国医疗机器人的发展起步较晚,但研究势头强劲。天津大学等团队共同研发的“妙手S”突破了人眼和人手的极限,在手术体位、图像视角、成本等各方面占优,打破了Da Vinci 的垄断,部分手术疗效对比也进一步证实了“妙手S”跟Da Vinci一样安全有效[9]。完成临床试验后“妙手S”就有机会进入机器人市场,实现国产手术机器人的商业化。
在医疗机器人相关研究领域,学者主要从各类医疗机器人的功能设计或案例分析、医疗机器人的发展现状和前景两个角度开展研究。在医疗机器人功能设计或案例分析方面,有学者团队通过实操探究Da Vinci 进行膀胱切除术的安全性[10];有学者通过分析多训练模式下的康复机器人运动,指出系统设计应多考虑患者跟理疗师之间的交互[11];有学者通过设计多维力传感器并研究其解耦方法来优化微创手术机器人在手术过程中的力反馈功能[12];有学者结合Da Vinci 实操经验总结出“3+2”模式,用于普及Da Vinci 介入的远端胃癌根治术[13]。在医疗机器人发展现状、应用前景及发展趋势方面,有学者对医学机器人的重要研究和已有的商业系统进行分析,指出未来的机器人应用仍存在仪器化和手术室集成、人机交互、形状和力传感三大挑战[14];有学者借助文献和专家访谈分析中国医疗机器人在发热门诊的使用情况,提出要突破专利壁垒,采取更精细化的发展战略[15];有学者通过分析论文和专利数据研究全球医疗机器人技术领域的发展态势,指出各国的技术领域分布各有不同[16];有学者从建模、交互、协调和优化4 方面对人机智能技术展开论述并进行了总结和展望[17];有学者通过分析论文和专利数据研究当前微创手术机器人在各国的发展情况和前沿热点,指出美国在该领域的产出能力远高于其他国家,而且手术机器人领域的论文和专利的研究重点也不同[18]。
除了理论研究,针对学术创新的成果与意义构建评价指标,也是各国科技创新发展的一环。国内的科技创新评估多从人才、投入与产出3个维度构建指标,但其中产出维度的指标构建往往只关注数量而忽略质量[12-13];德国学术界主要借助同行评议构建8 个领域34 个指标的评价体系,数量同样是其指标设计的重点[19]。然而国内外指标的设定都以经济投入为重点,忽略产学研等主体机构间的联系,脱离了学术交流这一推动科研深入的极为重要的环节。
当前科研产出主要有科技论文和专利两种形式。科技论文是学术研究成果的载体,而专利可以作为科学技术的信息源,承载技术创新的核心能力[20],二者各有侧重点。以往的研究主要在研究主体关系之间展开,如参与文献和专利产出的不同机构、不同国家之间的合作关系,分析某领域的学术主导力量;而近年来的研究开始将研究关注点转向论文和专利的研究方向和技术领域。在医疗机器人领域,目前还没有基于科技论文和专利数据对各国的跨国合作网络、质量调整专利等问题进行综合研究的文献,故本文以兰德公司提出的评估国家科技水平的方法[21]为主,辅以科技论文和专利的研究热点分析,对医疗机器人领域进行分析。
2 分析方法与数据来源
2.1 方法介绍
本文的分析分为现状分析和研究热点分析两部分。进行现状分析时使用兰德公司提出的开源方法;进行研究热点分析时分别使用VOSviewer 和LDA 主题识别模型提取文献和专利数据进行研究。
基于科技论文和专利数据,兰德公司提出了一种快速的、开源的国家科技水平评估方法,设计初衷是给美国国防部和情报部门针对新兴技术的演变决策提供决策工具。该方法设定了高影响力文献产出、文献合作网络密度、质量调整专利、科技组织能力4 项独立指标,以避免综合加权指标掩盖国际差异,在确保透明度、通用性和可扩展性的基础上快速评估国家在某领域的科技水平。
高影响力文献产出:Web of Science 数据库中某一特定领域所有文献被引频次前10%的文献数量。与文献数量相比,该指标更注重文献质量对科技水平的推动。
文献合作网络密度:即各国的跨国合作网络。该指标衡量科学共同体之间的连通性。
质量调整专利:通过专利质量调整得到相对公平的数据量,即通过专利家族加权处理体现专利质量的国际异质性。调整公式如下。

科技组织能力:即各国在相关领域产出科技论文或专利的组织数量。该指标可用于衡量一个国家用于推动该领域发展的机构资源水平。
2.2 数据采集
选择Web of Science核心数据集和Incopat专利数据库作为数据来源。在医疗机器人领域,国内已有学者对“人工智能+医疗”新兴技术进行文本挖掘研究[22]。本文借鉴其检索式,补充部分关键词,生成本文检索式:TI=(medical*OR medicine OR surgery OR rescue OR simulation OR recovery OR medical service OR health service OR assist OR capsule OR nano-targeting OR nurs* OR diagnosis OR transit)AND TI=(robot* OR manipulat*)NOT TI=industrial*。
文献检索时间范围为2017 年1 月1 日至2021年12 月31 日,筛选文献类型为期刊论文、会议录论文、综述论文、会议摘要、社论材料,最终检索得到相关文献12 387 篇。
专利检索式限制专利状态为“有效”或“PCT-有效期内”,检索时间范围为2017-2021 年,过滤救援机器人、工业机器人、水下机器人等不相关关键词,最终得到相关专利数据3 410 条。
3 医疗机器人领域科技发展水平评估
参与分析的指标数据来源为科技文献和专利数据,科技机构、合作网络等分析数据也来自科技文献和专利数据。科技文献作为基础研究成果,是最普遍的科研产出资料,而专利作为技术创新的成果,代表了特定领域最先进的技术研究。科技创新的不断深入,势必会有科技文献和专利的产出,故本文认为基于这两类数据进行评估具有可推广性。在此基础上,本文选取4 项指标数据能够参与分析且均排名靠前的8 个国家进行分析,分别是中国、美国、意大利、英国、德国、法国、韩国和日本。
3.1 高影响力文献分析
在得到的12 387 条文献数据中,选取被引频次为14 及以上的高影响力文献1 241 篇。
图1 显示了2017-2021 年期间产出的12 387篇文献的整体被引频次分布。有5 074 篇在笔者统计时尚未被引用。表1 显示了当前高影响力文献数量排名前8 位的国家的高影响力文献数量。可以看出,2017-2021 年,美国在医疗机器人领域的高影响力文献产出量远远大于其他国家,全球占比为41.58%。意大利、中国、英国发表高影响力文献数量相近。

表1 医疗机器人领域高影响力文献数排名前8 位的国家的高影响力文献数量
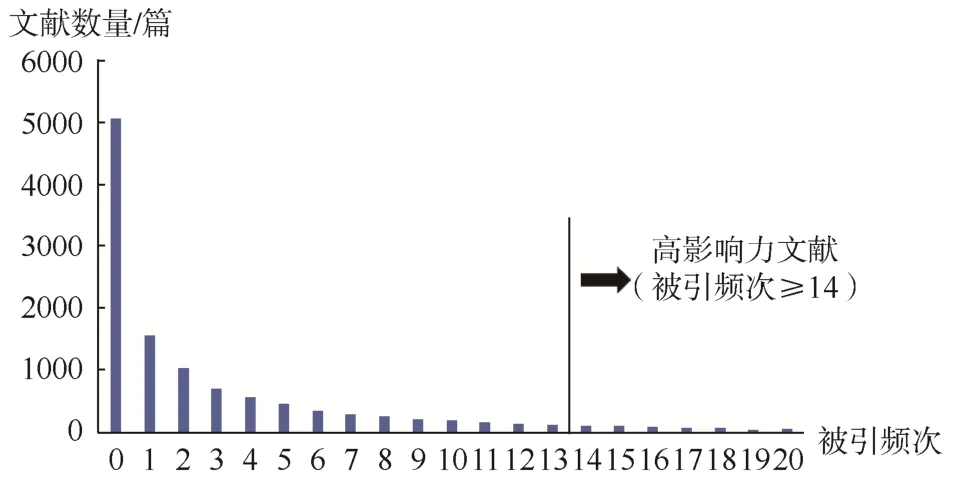
图1 2017-2021 年医疗机器人领域产出文献的被引频次整体分布
3.2 合作网络密度
借助VOSviewer 软件计算全球范围内机构合作连接强度,并得到合作连接强度排名前8 位的国家的相应数据(表2)。

表2 各国合作网络密度
从表2 可以看出,美国、意大利的合作网络密度依旧占据前两位,与高影响力文献数量排行对应。整体来看,欧美国家注重跨国机构之间的文献产出合作,对比之下,亚洲国家合作网络密度极低。如中国的文献数量仅次于美国,但机构合作连接数却低于英国和德国,说明中国学界的医疗机器人研究多集中在国内机构,并不注重跨国交流,国际合作表现不佳。
3.3 质量调整专利
表3 显示了质量调整前后各国申请的专利数目。根据简单专利家族数分别计算世界和各国平均专利家族数后相除得到调整系数,代入公式(1)得到新的专利数量。调整前后的专利数量正负变化代表该国家专利质量的优劣。

表3 各国专利质量调整情况
质量调整后,中国的专利申请数量由2 473 下降至1 314(表3),是所有纳入分析的国家中唯一大幅负方向波动的国家。美国、德国、法国等国家虽然专利申请数量少,但是调整后专利数量都大幅增加,说明这些国家的专利质量普遍很高,而中国由于专利补贴政策、专利个人买卖等因素导致“专利泡沫”存在,整体专利质量较低,与世界平均水平差距较大。
3.4 科技组织能力
2017-2021 年,各国的文献发表机构数量和专利申请机构数量如表4 所示。中国和美国的机构数量远高于其他国家。
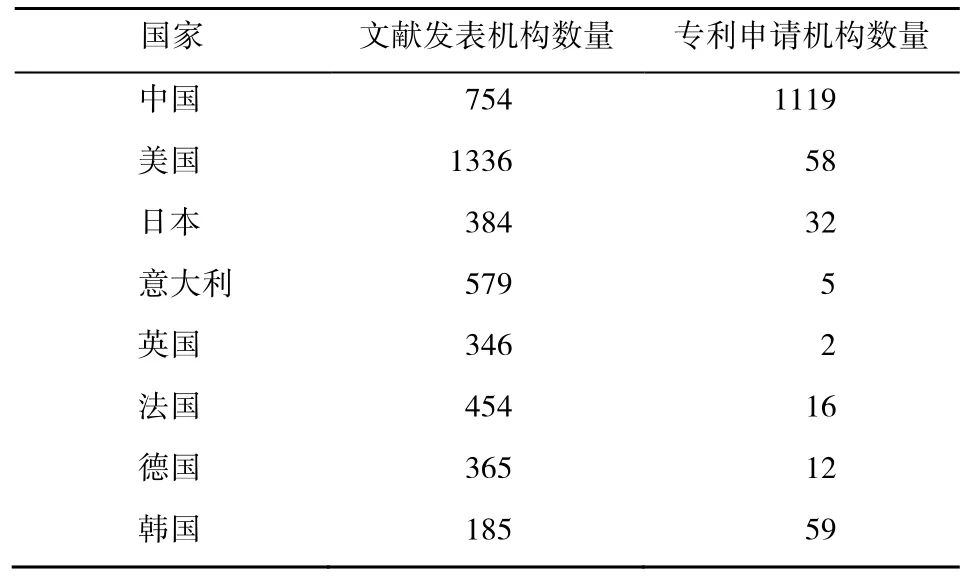
表4 各国文献/专利产出机构数量
尽管中国专利申请机构数量庞大,但是调整后的专利数量使平均每家申请机构申请的专利数从2.21 下降到1.17,说明较多机构申请的专利质量较低。
3.5 文献高产出机构分析
使用VOSviewer 对文献产出机构进行共现分析,由于机构数量庞大,所以选取发文数量>30 篇的机构参与分析,得到如图2 所示的共现结果。可以看出,世界医疗机器人领域的文献主要来自高校,营利性医学中心和国家级别科研机构也参与产出,社会企业等机构产出甚少。共现结果还显示,欧美机构连接网络密度极高,说明欧美国家国内外机构之间的合作十分密切,而中国、韩国、日本等国家的节点密度较为稀疏,整体上倾向于内部合作。

图2 文献产出机构共现结果
4 医疗机器人领域前沿热点分析
4.1 文献研究前沿热点
使用VOSviewer 软件对文献样本的关键词进行共现分析,由于关键词数量庞大,所以合并同义词后,选取出现频次>50 次的关键词(共157 个)进行分析,结果如图3 所示。

图3 文献关键词共现结果
VOSviewer 将关键词聚成7 类,根据每类关键词的词义,可将其分别概括为医疗机器人分类及系统设计、膀胱癌治疗、医疗机器人综合要点、学习曲线等理论要点、泌尿科疾病治疗、头颈部癌症治疗、胸外科手术。
文献关键词共现图整体联系紧密,手术机器人(robotic surgery)处于整个网络的中心且节点最大,说明手术机器人研究在领域研究中占据领导地位。微创手术(minimally invasive surgery)、切除术(resection)、学习曲线(learning-curve)、系统(system)、并发症(complication)、前列腺癌症(prostate cancer)等关键词分别围绕在手术机器人周围,属于不同关键词聚类中的研究重点。表5显示了每个聚类中的部分关键词。

表5 医疗机器人领域文献7 大聚类关键词示例
4.2 专利研究前沿热点
借助LDA 主题模型挖掘法对专利摘要进行主题分类。采用一致性作为主题数确定标准,计算结果如图4 所示,选取最优结果K=5 作为最佳主题数。根据聚类输出5个主题的关键词并人工归类不同主题(表6),同时通过pyLDAvis 输出主题分类可视化结果。

图4 一致性结果和pyLDAvis 可视化

表6 LDA 主题分类数据
5个主题可以归纳为装置与机械支持(Topic1、Topic4)、辅助医疗(Topic2、Topic3)和产品外观设计(Topic5)3个部分。Topic1、Topic2 占比最高,说明专利摘要涉及机械部件衔接、检测与成像等方面的内容较多。结合图5 所示的专利IPC号小类分布可以看出,A61B(诊断、鉴定)、B25J(机械手)、A61G(运输工具)小类的专利申请数量最多,说明在专利领域,技术研究集中在内窥镜等用于检查、诊断疾病的医疗仪器,以及用于患者运输、康复治疗等用途的物理支持技术方面。

图5 医疗机器人相关专利IPC 号小类分布
5 对我国医疗机器人赛道发展的启示
我国《“十四五”医疗装备产业发展规划》明确指出了我国医疗机器人行业到2025 年的发展目标和重点任务,以推动产业进入发展成熟期,实现建设“健康中国”的目标。在此背景下,结合前文现状和热点分析,本文提出以下建议。
5.1 重视国际交流与合作
现今,全球已进入大科学时代[23],各领域的技术发展都开始呈现多学科结合的趋势,科学问题的复杂度都不断上升,尤其是一些国家级的科研项目,从规模、技术难度到资金投入,都非单个国家能承担的,科学国际化成为必然趋势。国外学术界多以同行为联结纽带,开展跨机构、跨国别的学术交流。韩国延世大学创立了跟世界顶尖学者合作的平台“延世前沿合作社”[24],鼓励师生在世界范围内开展合作。美国创立国家实验室与一流研究型学校合作模式,吸引全球各领域的顶尖人才来深造,形成美国学术界与赴美学者双赢局面[25]。我国则多以同事作为纽带开展合作,跨国别合作较少[26],这就解释了我国科技文献产出机构与国外机构的交流合作不如欧美机构之间密切的现象。这种研究模式约束了研究视角,阻碍了学科多元化融合。也有一些国内机构开展了与国内其他机构及国际机构的合作。如上海交通大学创立“上海交通大学医疗机器人研究院”,集中研究各类医疗机器人,同时还跟国内医院开展临床合作,此外还开展了暑期交流项目,邀请世界范围内的医疗机器研究领域顶尖学者和高等院校学生参与医疗机器人相关学习讨论,为自身的跨国合作交流提供了路径。我国应该充分利用便利的互联网环境,跳出“同事”藩篱,积极开展国际合作,提高创新与科研能力。
5.2 完善专利质量补贴机制和专利立法
当前,我国的专利市场发展还处于“重开发轻质量”的阶段,大量的专利并非是发明设计,而是微小改良[27]。同时,政府为了鼓励创新而提出的专利资助办法使政府的专利补贴机制变成了政府对专利的“购买”机制,扭曲其真实出发点,是对低质量专利的变相激励,一定程度上造成了“专利泡沫”[28-30]。在这方面,欧美国家采取的措施具有借鉴意义。美国是世界上第一个对专利质量立法的国家,2015 年通过了制裁“专利流氓”的法案,对专利质量进行严格的把控。而《欧洲专利公约》提出了一种异议程序,专利申请人不仅可以在程序内申请专利,针对有异议的专利,也可以在其获得授权后的9个月内提出反对,有效的反对意见会直接对该专利产生影响[31],赋予所有人监督权来提高授权专利的质量。我国需在借鉴有效制度的基础上因地制宜,完善专利审查制度、合理制定创新激励政策,也需对违规“专利买卖”进行严厉打击,从源头杜绝低质量专利的流通。
5.3 促进“政产学研用”紧密联系
促进“产学研”合作,本质是将作为研究成果商业化主体的企业和作为技术产出的高校和研究机构连接在一起,实现新兴技术从理论研究到实际应用的生产要素合并流程。以美国为例,机器人进入医疗领域后,美国国家航空航天局(National Aeronautics and Space Administration,NASA)研究员加入斯坦福国际研究院(Stanford Research Institute,SRI)开发VR 远程手术技术,之后美国陆军利用该技术远程为伤兵治疗,部分研究员最终成立公司并将手术机器人引入民用外科手术中[32]。而我国的机器人研究集中于高校和研究所,企业依赖性低,医工也并未实质融合,多数研究无法进入临床环节[33-34]。当前创新环境正在将传统“产学研”合作推向“政产学研用”协同发展,将政府的平台构建功能和监管协调功能引入各领域。事实上,我国的数据平台构建处于萌芽期,相关的制度化标准也尚未完善,而美国、日本及欧盟等都颁布了人工智能伦理规范或法案等[35]。与之相比,我国的政策力度就略显薄弱。我国应以市场为目标导向,以用户为市场主体,提高“研究-技术-成果”转化效率,积极创建数据平台和监管,推动我国“政产学研用”大环境的搭建。
5.4 确保不同研究阶段的赛道同步发展
目前,腹腔镜技术的理论研究及其在泌尿学、肾脏学等医学领域的应用研究已在各国受到重视,我国在这些热门领域的研究起步晚于欧美等发达国家,尽管近年来大力发展科技,助力医疗机器人产业发展,但是差距依然存在。而在神经外科等领域,机器人相关研究与实探虽然起步很早(PUMA就是神经外科机器人),但由于手术精度高、机械技术受限等原因,研究进度远不如泌尿科、内科手术等领域。所以在神经外科领域,我国的研究进度与世界水平齐平。除了在热门领域不断追赶发达国家外,我国在神经外科等非劣势赛道也需要持续关注,在已有研究基础上推动机器人的临床实践,扩展更多细分手术领域。
5.5 引导医疗机器人市场全面发展
目前世界医疗机器人领域的研究热点分布在癌症治疗、疾病诊断、病人运输、康复治疗等方面,且市场上手术机器人占比最高。相比之下,我国医疗机器人市场中康复机器人的占比最高,且远高于手术机器人,处于“偏科”状态[36],这种现象的出现虽然有社会日益老龄化的原因,但也说明我国的手术机器人等研究多数停留在项目阶段,并未转移至临床环节。在当前我国人口日益老龄化、“三胎”政策实施的前提下,人们对医疗健康的诉求越来越高,除了康复机器人和手术机器人,未来各类家用医疗机器人、服务机器人的需求都不容小觑。除了加速“产学研”产业链的形成,还需要政府大力引进、鼓励各类医疗机器人进入医院,扶持、激励医疗机器人产业健康、积极发展,打造“医生-患者”双赢局面。
6 结语
近年来医疗机器人受到世界各国的广泛重视,未来还有很大的发展空间,跟踪、了解领域内研究热点,能够帮助研究主体机构了解新兴动向,还能为决策部门提供有效信息。本文通过4 个独立指标的分析,对八大科技强国的科技发展水平进行评估,不同国家的研究各有特点,欧美国家注重跨机构、跨国别的交流合作和高质量成果的产出,亚洲国家更偏向于独立研究;欧美国家注重专利质量,中国在专利数量方面占据优势,但在专利质量的把控方面还有很大的提升空间。
近些年来,全球医疗机器人市场规模增长迅速,手术机器、康复机器人发展迅猛,各种细分领域的医疗机器人也逐渐运用于医疗服务。随着数字化、智能化的不断深入融合和多应用场景需求的增加,医疗机器人无疑是未来前景一片广阔的“蓝海”,我国利益相关者需深刻认识到当前我国在该赛道尚有不足,需不断巩固自身优势、填补短板,在这片“蓝海”占有一席之地。
猜你喜欢
水运工程(2022年7期)2022-07-29 08:37:38
青年生活(2019年23期)2019-09-10 12:55:43
传感器世界(2019年4期)2019-06-26 09:58:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08
少儿科学周刊·儿童版(2015年4期)2015-06-17 03:37:19
中共南宁市委党校学报(2015年4期)2015-02-28 11:48:10
中国音乐教育(2014年7期)2014-02-06 21:46:15
杭州科技(2013年5期)2013-03-11 16:40:59
