
基于自适应模糊神经网络的污泥膨胀智能检测方法
2022-02-16 11:08钟麦英
山东科技大学学报(自然科学版) 2022年1期
张 璐,钟麦英
(山东科技大学 电气与自动化工程学院,山东 青岛 266590)
污水处理过程主要采用活性污泥法处理技术,以活性污泥为载体来吸附和氧化有机物,实现污染物的去除[1]。对于活性污泥法污水处理过程来说,良好的泥水分离效果是保证其高效稳定运行的关键。然而,被动接受的进水水质和进水流量、复杂的生化反应机理以及众多的影响因素导致活性污泥法污水处理过程中污泥膨胀现象频发[2]。污泥膨胀现象的发生不仅引起污泥持续流失,破坏出水水质,还会导致污水处理系统性能的下降和崩溃[3]。因此,有效检测污泥膨胀的发生、降低其危害已成为污水处理过程面临的难点问题。
为了实现污水处理过程中污泥膨胀的检测,一些基于机理模型的方法得到国内外学者的广泛关注[4-5]。基于机理模型的方法主要通过莫诺方程、活性污泥模型等分析污泥的沉降特性,获取表征污泥膨胀状态的相关信息。Vazquez等[6]通过分析微生物菌类的生长变化和污泥颗粒的形态特点,建立污泥颗粒大小与相关过程变量间的机理模型,完成对污泥颗粒状态的描述。Dominika等[7]基于活性污泥I号模型获取污泥沉降状态与底物浓度间的关系,实现污泥膨胀动态特性的获取。此外,韩红桂等[8]设计了一种基于丝状菌生长动力学的污泥容积指数简化机理模型,通过数据分析和统计方法校正机理模型参数,实现污泥容积指数的高效检测。虽然上述基于机理模型的检测方法能够实现对污泥膨胀状态的描述,但大多数机理模型检测方法均建立在微生物动力学基础上,检测模型结构复杂,模型参数难以根据动态的污水处理过程进行自适应调整,无法保证污泥膨胀检测效果[9-10]。
为了克服机理模型检测方法的不足,数据驱动检测方法已成为提高污泥膨胀检测效率的关键[11-12]。数据驱动检测方法主要利用图像信息或过程变量数据等获取污泥膨胀的关键特征信息,进而实现污泥膨胀检测。Mesquita等[13]通过显微镜获取丝状菌的形态图像信息,利用偏最小二乘方法分析丝状菌形态与污泥沉降之间的规律,实现丝状菌污泥膨胀的检测。Han等[14]研究了一种基于多元局部二次多项式回归的污泥容积指数检测方法,建立污泥容积指数与相关过程变量间的关系,完成污泥容积指数的检测。许玉格等[15]设计一种基于核函数的加权极限学习机故障检测方法,根据核函数的非线性映射实现数据线性可分,提高污水处理过程故障的检测精度。此外,一些基于自组织映射神经网络[16]、径向基神经网络[17]的污泥膨胀检测方法也得到了学者的广泛研究。上述数据驱动检测方法通过建立污泥容积指数等关键指标与相关过程变量间的非线性关系,实现污泥容积指数等的检测。然而由于实际污水处理过程运行环境的复杂性以及运行过程的时变性等,导致现有的数据驱动检测方法难以满足污泥膨胀在线准确检测的需求。因此,设计有效的污泥膨胀检测方法是亟需解决的难题。
针对上述难题,本研究提出一种基于自适应模糊神经网络的智能检测方法,实现污泥膨胀的准确判断。该方法的主要创新点为:构建一种基于自适应模糊神经网络的污泥膨胀检测模型,实时准确获取污泥膨胀的动态特性;设计基于智能检测模型平均绝对误差和标准差的多指标评价策略,实现污泥膨胀的准确判断。
1 污泥膨胀特性分析及问题描述
污泥膨胀是指由于丝状菌或菌胶团的过量生长导致活性污泥沉降速率缓慢、活性污泥絮体压缩恶化的状态。污泥膨胀可以分为丝状菌污泥膨胀和非丝状菌污泥膨胀,其中,丝状菌污泥膨胀是指丝状菌大量繁殖形成的一种网状结构,阻碍污泥絮体的正常沉降;非丝状菌污泥膨胀是指菌胶团的大量繁殖导致多聚糖类粘性物质的积聚,影响污泥的沉降。在实际污水处理过程中,90%以上的污泥膨胀都是丝状菌污泥膨胀,因此,将丝状菌污泥膨胀作为研究对象。
污泥容积指数(sludge volume index,SVI)是反映丝状菌污泥膨胀状态的关键评价指标之一,其标准测定方式为混合液(1 L)经过30 min静沉形成的活性污泥容积(mL)与混合液(1 L)中悬浮固体干重(g)的比,具体可表示为污泥沉降比(sludge volume rate,SV)与混合悬浮液固体浓度(mixed liquor suspended solids,MLSS):
(1)
其中:SV是污泥沉降比,mL/L;MLSS为混合悬浮液固体浓度,g/L。通过其计算能有效反应活性污泥的沉降性能。
由于丝状菌种类的多样性以及生成过程的差异性,影响SVI值的因素较多,不仅受丝状菌生长率μf的影响,也与污泥负荷(organic load rate,F/M)密切相关,有:
(2)
其中:μm是丝状菌最大比生长率;SS和KS分别为底物浓度与底物饱和系数;SO和KO分别为溶解氧浓度与溶解氧饱和系数;SN和KN分别为氮浓度与氮饱和系数;SP和KP分别为磷浓度与磷饱和系数;s1、s2、s3和s4分别是开关函数的选择指数,其取值为0或1。
F/M=QSS/VX。
(3)
其中:Q是污水进水量,V是曝气池容积,X是混合液生物量浓度。此外,根据文献[14]可知,SVI也受到一些非生物量,如温度T、pH值和污泥停留时间SRT等的影响。综上,影响SVI的主要因素包括F/M、SO、MLSS、SN、SP、T和pH,具体可描述为:
SVI=f(F/M,SO,MLSS,SN,SP,T,pH)。
(4)
其中:f( )是未知的非线性函数,用于描述SVI与相关影响因素间的关系。为了实现SVI的检测,下面构建SVI检测模型,设计SVI评价指标。
2 污泥膨胀智能检测方法
2.1 基于自适应模糊神经网络的智能检测模型设计
为了实时获取污水处理过程SVI的动态特性,设计一种基于自适应模糊神经网络的智能检测模型(adaptive fuzzy neural network based intelligent detection, AFNN-ID)。模糊神经网络可充分利用模糊系统和神经网络的优势,基于模糊规则描述污泥膨胀特性,并利用神经网络的学习能力来提高模糊系统的自适应能力,进而实现SVI与相关影响因素间关系的准确描述。
以F/M,SO,MLSS,SN,SP,T和pH为输入,设计一个多输入单输出的模糊神经网络智能检测模型,其基本拓扑结构如图1所示。

图1 模糊神经网络智能检测模型拓扑结构图Fig. 1 Topological structure diagram of fuzzy neural network-based intelligent detection model
由图1可见,所设计的多输入单输出模糊神经网络智能检测模型共包含4层:输入层、径向基(radial basis function,RBF)层、规则层和输出层。输入层个数由SVI相关影响因素个数确定,具体可描述为:
xi(t)=ui(t)。
(5)
其中,ui(t)是t时刻第i个输入(i=1,2,…,7),则x(t)=[x1(t),x2(t),…,x7(t)]=[F/M(t),SO(t),MLSS(t),SN(t),SP(t),T(t), pH(t)]是输入层的输出向量。
RBF层的主要功能是实现输入层数据的模糊化,该层共包含10个神经元,其个数由经验法确定,具体可描述为:
(6)
其中:θj(t)是t时刻RBF层第j个神经元输出,其为隶属度函数的乘积,θ(t)=[θ1(t),θ2(t),…,θj(t),…,θ10(t)]是t时刻RBF层的输出向量,cj(t)=[c1j(t),c2j(t),…,c7j(t)]是t时刻第j个神经元的中心,σj(t)=[σ1j(t),σ2j(t),…,σ7j(t)]T是t时刻第j个神经元的宽度。
规则层的主要作用是实现输入数据的模糊化推理,具体可描述为:
(7)
其中:vl(t)是t时刻规则层第l个神经元输出,规则层与RBF层神经元个数相等,v(t)=[v1(t),v2(t),…,vl(t),…,v10(t)]是t时刻规则层的输出向量。
输出层通过加权因子法实现SVI值的计算,具体可描述为:
(8)
其中:SVI(t)是t时刻输出层的输出,ω(t)=[ω1(t),ω2(t),…,ωl(t),…,ω10(t)]是规则层与输出层之间的权值向量。
为实现模糊神经网络智能检测模型参数ω(t),c(t)(c(t)=[c1(t),c2(t),…,c10(t)])和σ(t) (σ(t)=[σ1(t),σ2(t),…,σ10(t)])的自适应调整,设计一种基于二阶L-M的参数更新算法,实现模型参数的同时调整,加快计算速度。模型参数的更新公式可表示为:
Ξ(t+1)=Ξ(t)+(Η(t)+κ(t)I(t))-1·G(t),
(9)
其中:Ξ(t)是t时刻的参数向量,Ξ(t)=[ω(t),c1(t),c2(t),…,c10(t),σ1(t),σ2(t),…,σ10(t)],H(t)是拟海森矩阵,
Η(t)=JT(t)J(t),
(10)
其中J(t)是t时刻的雅克比向量。
(11)
(12)
(13)
(14)
(15)
(16)
其中,e(t)是t时刻SVI的检测误差,
e(t)=SVI′(t)-SVI(t),
(17)
其中,SVI′(t)是t时刻SVI的实际输出;I(t)是单位矩阵,用于避免矩阵求逆中的病态情况;G(t)是梯度向量,有
G(t)=JT(t)e(t)。
(18)
κ(t)是t时刻的自适应学习率,用于提高智能检测模型收敛速度,其计算方式为:
κ(t)=ξ(t)κ(t-1)。
(19)
其中,ξ(t)是t时刻学习率的调整系数,计算方式为:
ξ(t)=(εmin(t)+κ(t-1))/(εmax(t)+1)。
(20)
其中:εmin(t)和εmax(t)分别是拟海森矩阵H(t)的最小特征值、最大特征值,0<εmin(t)<εmax(t),0<κ(t)<1。
上述设计的模糊神经网络智能检测模型以及基于自适应二阶L-M算法的参数调整策略,能够实现污水处理过程SVI动态特性的实时获取。
2.2 污泥膨胀多指标评价策略设计
评价指标是检测污泥膨胀状态的主要依据,本研究根据智能检测模型输出误差分布特点建立多指标评价策略。智能检测模型输出平均绝对误差反映检测SVI与实际SVI间的大小差异,标准差反映检测SVI与实际SVI间的离散程度。基于检测SVI与实际SVI间的平均绝对误差以及标准差,建立多指标评价函数:
J1(t)=|SVI′(t)-SVI(t)|,
(21)
(22)
其中:t=1,…,T;J1(t)是t时刻的第一个评价指标,反映SVI检测输出与实际输出间误差的大小;T是测试样本的个数;J2(t)是t时刻的第二个评价指标,反映SVI检测输出与实际输出间误差的离散程度;N是测量样本的个数;mod(N, 2)是测量样本数N与2之间的余数,若N为偶数,则mod(N, 2)=0,若N为奇数,则mod(N, 2)=1;|N/2|表示对N/2向负无穷方向取整。多指标评价函数中的阈值主要取决于无污泥膨胀发生时输入变量对输出残差的最大影响,因此,利用无污泥膨胀时的运行数据,计算模型训练输出绝对误差最大值和标准差最大值,具体可表示为:
(23)
(24)
其中:t=1,…,S,S是训练样本的个数;J1,th(t)是J1(t)的阈值函数,为训练样本中模型输出绝对误差最大值;J2,th(t)是J2(t)的阈值函数,为训练样本中模型输出标准差的最大值。
若J1(t)超出阈值J1,th(t)或J2(t)高于阈值J2,th(t)时,则认为发生污泥膨胀故障,具体判定逻辑为:
J1(t)≤J1,th(t) 且J2(t)≤J2,th(t),t=1,…,S,正常;
(25)
J1(t)>J1,th(t) 或J2(t)>J2,th(t),t=1,…,S,污泥膨胀。
(26)
只有J1(t)和J2(t)同时小于其阈值时,认为无污泥膨胀现象发生。
基于多指标评价策略和评价指标阈值,通过式(25)~(26)所示的判定逻辑,能够实现污水处理过程污泥膨胀状态的在线检测。
基于所设计的智能检测模型和多指标评价策略,污泥膨胀智能检测算法可总结为:
1) 获取大量的无污泥膨胀运行数据,并将其作为训练样本;利用式(5)~(20)计算训练样本输出,获取训练样本输出的平均绝对误差和标准差,根据式(23)~(24)计算多指标评价策略的阈值。
2) 对于在线测试样本,根据式(5)~(20)计算测试样本输出,利用式(21)~(22)计算测试样本输出的平均绝对误差和标准差,将测试样本输出的平均绝对误差和标准差与其阈值进行比较,并根据式(25)~(26)的判定逻辑判断污泥膨胀现象是否发生。
3 实验结果及分析
为了验证所提出的AFNN-ID的有效性,利用从某活性污泥法污水处理厂获得的2018年运行数据对AFNN-ID方法进行测试,分别从智能检测效果和污泥膨胀检测效果两方面展开。
3.1 智能检测方法结果及分析
利用15天的无污泥膨胀数据进行验证,分别包括厌氧池的pH、T,曝气池的F/M、SO、SN、SP和二沉池的MLSS,其采集频率均为30 min/次,共720组无污泥膨胀数据,剔除异常数据后,剩余600组运行数据中500组运行数据作为训练样本,另外100组作为测试样本。基本的参数设置为:输入为7个,RBF层神经元个数为10个,输出为SVI,RBF层初始神经元初始中心值在(0,3.5)范围内随机生成,初始宽度在(0,1.2)范围内随机生成,初始学习率设为0.8。利用均方根误差(root mean square error,RMSE)和算法精度(model accuracy,MA)评价智能检测方法的性能
(27)
(28)
图2给出了AFNN-ID训练效果图,图3给出了智能检测模型训练RMSE,图4展示了智能检测模型测试效果图及测试误差。

图2 智能检测模型训练效果图Fig. 2 Training results of intelligent detection model
由图2可见,所设计的AFNN-ID能够实现污泥膨胀变化趋势的跟踪以及动态特性的描述,除少数训练样本外,智能检测模型训练误差基本保持在[-5,5]之间,表明所设计的智能检测模型能够实现污泥膨胀动态特征的实时获取。
由图3可见,智能检测模型最终训练RMSE可稳定在0.085左右,进一步验证了所提出的智能检测模型能以较小的误差跟踪污泥膨胀实际值,具有较好的训练效果。
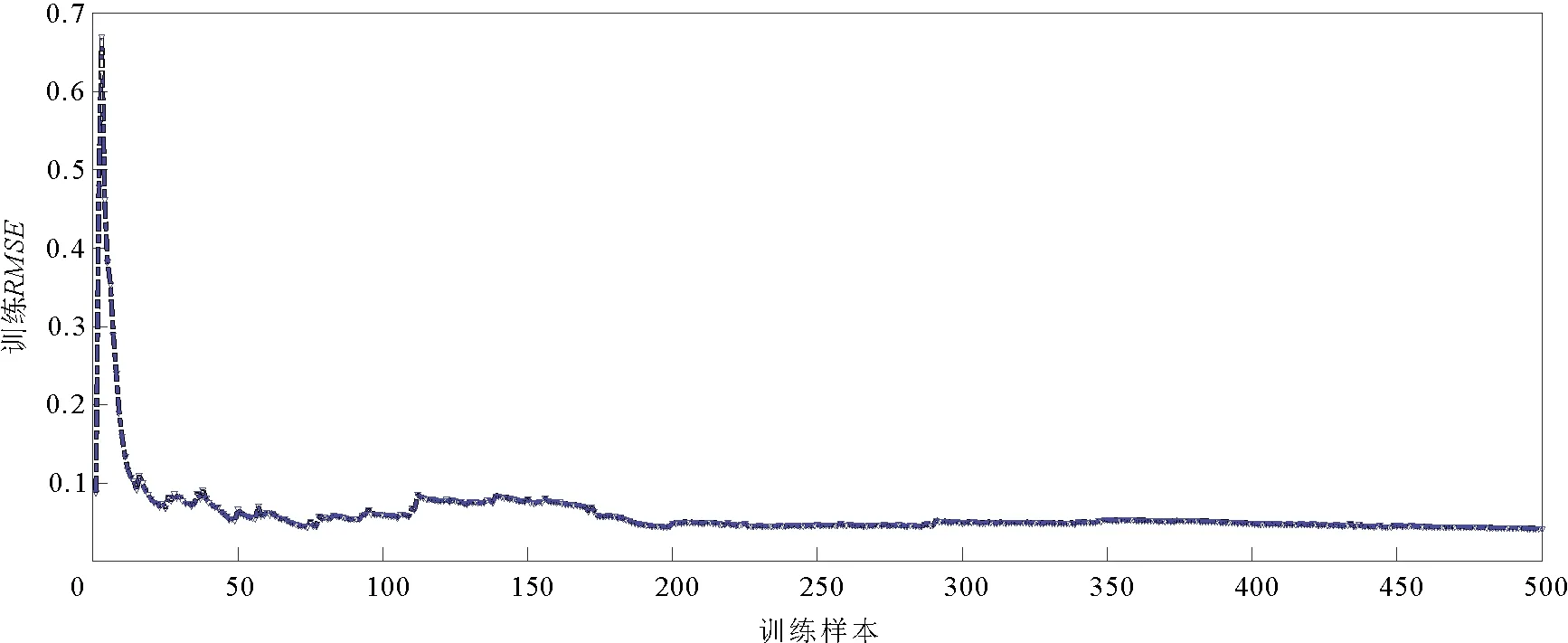
图3 智能检测模型训练RMSEFig. 3 Training RMSE of intelligent detection model
由图4可以看出,所设计的AFNN-ID能够获得较好的测试效果,测试误差分布在[-10,12]范围内,表明AFNN-ID可以有效描述污泥膨胀的动态特性,能够为其检测提供实时的状态信息。

图4 智能检测模型测试效果图及测试误差Fig. 4 Testing results and testing errors of intelligent detection model
为了进一步验证所提出的基于自适应模糊神经网络的智能检测模型(AFNN-ID)的优势,与其他4种 SVI检测模型:简化机理模型(simplified mechanism model, SMM)[8]、基于多元局部二次多项式回归模型(multivariate local quadratic polynomial regression, MLQPR)[14]、前馈神经网络检测模型(feed forward neural network-based model, FNNM)[19]和动态自回归模型(dynamic autoregressive model, DARX)[20]方法进行对比,结果如表1所示。
由表1可见,AFNN-ID能够获得较小的训练平均RMSE值0.085(输入输出样本反归一化前的平均RMSE)和测试平均RMSE值2.567(输入输出样本反归一化后的平均RMSE),均低于其对比检测模型。AFNN-ID的测试平均MA为94.23%,优于SMM、MLQPR、FNNM和DARX方法。由此可见,所设计的智能检测方法可以更有效地逼近实际SVI值,实现污泥膨胀特性的实时准确获取。

表1 不同检测模型性能对比Tab. 1 Performance comparison of different detection models
3.2 智能检测结果及分析
为了验证所设计的多指标评价策略的有效性,对100组运行数据(包含无污泥膨胀数据和污泥膨胀数据)进行检测。在设计的多指标评价策略中,J2指标中的测量个数N取10,J1,th和J2,th通过无污泥膨胀数据训练获得。存在污泥膨胀运行数据的具体检测效果如图5所示。
由图5可以看出,当出现污泥膨胀运行数据时,即运行数据超出正常范围(图5下图橙黄色线外)时,所设计的指标策略会超出其阈值范围,再次验证了所设计的智能检测方法的性能。
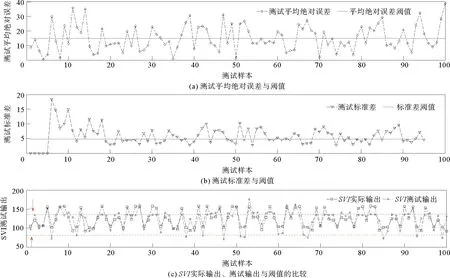
图5 AFNN-ID检测效果Fig. 5 Detection results of AFNN-ID
4 结论
针对污水处理过程污泥膨胀难以在线检测的问题,设计了一种基于自适应模糊神经网络的智能检测方法,实时获取污泥膨胀的动态特性,通过多指标策略评价污泥膨胀状态。实验结果表明,所设计的智能检测方法能够实现污水处理过程污泥膨胀特性的实时描述和状态的在线检测,能够为污泥膨胀抑制提供有效的参考信息。为了进一步提高污水处理过程污泥膨胀检测效率,在后续研究中,将研究基于运行机理和数据驱动融合的智能检测方法。
猜你喜欢
电子产品可靠性与环境试验(2022年4期)2022-09-01
军事文摘(2022年16期)2022-08-24
中国应急管理科学(2022年2期)2022-05-23
节能与环保(2022年3期)2022-04-26
建材发展导向(2022年2期)2022-03-08
今日农业(2021年20期)2021-11-26
当代化工(2020年11期)2020-12-17
当代化工(2019年8期)2019-12-13
当代化工(2019年12期)2019-01-14
建筑工程技术与设计(2015年20期)2015-10-21
