
拖拉机自动导航变曲度路径跟踪控制
2022-02-15 01:06吴才聪吴思贤陈智博杨卫中翟卫欣
农业工程学报 2022年21期
吴才聪,吴思贤,文 龙,陈智博,杨卫中,翟卫欣
·农业装备工程与机械化·
拖拉机自动导航变曲度路径跟踪控制
吴才聪,吴思贤,文 龙,陈智博,杨卫中,翟卫欣
(1. 中国农业大学信息与电气工程学院,北京 100083; 2. 农业农村部农机作业监测与大数据应用重点实验室,北京 100083)
针对当前拖拉机自动导航曲线跟踪控制精度不能满足生产需要的问题,该研究提出一种基于前轮转角前馈补偿策略的变曲度路径跟踪控制方法。综合考虑农机作业速度和目标路径曲度对前视距离的影响,通过调整前视区域和计算预瞄点,动态调整前视距离和前轮转角前馈量,在追踪预瞄点的过程中,利用农机与目标路径偏差设计变曲度路径跟踪模糊控制器,通过实时调整拖拉机前轮转角补偿量减小稳态误差。以DF2204无级变速拖拉机为试验平台,设计并研发了自动导航系统,开展21组变曲度路径跟踪控制试验。试验结果表明,拖拉机以1.0、1.5、2.0和3.0 m/s速度行驶时的平均绝对误差的平均值分别为2.7、2.7、3.3和4.0 cm,均方根误差的平均值分别为3.4、3.7、4.6和5.0 cm,满足农业生产需求。所提方法可有效提高农机曲线路径跟踪精度,减少漏耕,提高农田利用率。
拖拉机;自动导航;路径跟踪;变曲度;前视距离;模糊控制
0 引 言
农机自动导航技术可有效提高农机作业精度与作业效率[1-3]。目前,农机自动导航的直线跟踪精度可达到±2.5 cm,满足农机直线路径作业要求,但在曲线路径特别是变曲度曲线路径作业方面,由于路径曲率变化导致跟踪效果较差[4],会造成明显的漏耕,导致土地浪费。不规则农田和坡耕地分布较广[5],亟需提高农机变曲度路径跟踪控制精度以适应机械无人化生产。
路径跟踪控制是实现农机自动导航技术的关键[6],国内外已有众多学者开展了大量研究,其中纯追踪控制算法(Pure Pursuit,PP)是一种模拟人工驾驶过程的几何路径跟踪控制方法,是农业机械自动导航技术中常用的控制算法。前视距离作为纯追踪算法的唯一输入参数,对农机的路径跟踪效果起到至关重要的作用。Netto等[7]分析了前视距离与车速的关系,提出了前视距离与车速的二次函数方程,但在农业场景下农机作业速度较低,车速与前视距离的耦合性较弱,对不同速度的农机作业任务适应性较差。黄沛琛等[8]使用BP神经网络实现动态调整前视距离改进纯追踪算法,仿真验证方法可行,但该方法需要大量的训练样本,需要对不同种类农机的起始位姿样本进行训练,难以在田内实际应用,具有一定局限性。唐小涛等[9]提出了一种基于模糊自适应纯追踪模型的农业机械直线路径跟踪方法,以横向误差和速度作为模糊控制器的输入,前视距离作为输出,但该方法忽略了前方目标路径曲度对车辆行驶状态的影响,跟踪误差大,很难快速修正。Nagasaka等[10]在固定转弯半径的前提下,利用航向误差实现了农机的地头转弯路径跟踪,但该方法由于决策量较少,在直线与掉头曲线衔接处出现超调现象,不适用于曲度多变的曲线路径跟踪。张华强等[11]通过粒子群算法(Particle Swarm Algorithm,PSO)根据实时横向跟踪误差动态确定前视距离,提高了拖拉机自动导航的直线跟踪精度,但不适合曲线作业。陈无畏等[12]构建了速度和前视距离与路径弯曲度之间的二次函数,但忽略了速度与前视距离之间的耦合关系。李革等[13]针对曲线路径跟踪对纯追踪算法进行改进,提出了前视距离与速度等变量的线性关系,插秧机以1 m/s速度行驶时,曲线平均跟踪误差为9.6 cm;Yang等[14]提出一种基于最优预瞄点的路径跟踪控制方法,拖拉机以1 m/s行驶时,曲线平均跟踪误差为6.7 cm,均不满足精准作业要求[15]。
为了提高拖拉机自动导航技术在不规则田块或坡耕地行驶时的变曲度路径跟踪精度,本文提出一种基于前轮转角前馈补偿策略的拖拉机自动导航变曲度路径跟踪控制方法,通过改进纯追踪算法,综合考虑拖拉机行驶速度与目标路径弯曲度动态调整前视距离,利用拖拉机与目标路径的实时位置误差设计模糊控制器,通过模糊控制算法对前轮转角进行补偿,并通过田间试验验证该方法的有效性。
1 材料与方法
1.1 拖拉机运动学建模
本研究采用的东风DF2204拖拉机为前轮转向、四轮驱动。假设拖拉机在田内或机耕道的路径跟踪过程中行驶速度较低,行驶路面起伏程度较小,转向车轮转角一致,忽略轮胎的侧偏特性,车辆航向角速度即为车辆横摆角速度,则可将拖拉机简化为二轮车模型。以正北方向为轴正方向,正东方向为轴正方向建立惯性坐标系,得到图1所示拖拉机在惯性坐标系下的运动学模型。

注:δ1为前轮转角,(°);θ为车辆航向角,(°);A为车辆前轮中心;B为车辆后轮中心;v为车辆速度,m·s-1;L为车辆轴距,m;R为转向半径,m;α为车辆前视角,(°);Ld为车辆后轴中心与预瞄点的距离,m。
在惯性坐标系中,(x,y)为车辆二轮车模型前轮坐标,(x,y)为车辆二轮车模型后轮坐标。由图1几何关系可得二轮车模型前轮转角为
考虑前后轮几何约束及运动学约束可得拖拉机的运动学模型为

1.2 纯追踪控制器设计
1.2.1 纯追踪控制算法
纯追踪控制算法是移动机器人典型的横向控制方法。该方法以二轮车模型为基础,以车辆后轴中心为切点、车辆纵向方向为切线,通过调整前轮转角1,使车辆沿着一条圆弧轨迹线到达预瞄点。
根据图1几何关系有:

通过前视距离L确定前视角,进而由公式(3)计算出前轮转角1。前视距离是纯追踪控制算法的一个重要参数,前视距离设置是否合理直接影响路径跟踪水平。前视距离设置过长,跟踪轨迹会更平滑,但在曲线转向处会存在转向不足或转向过度的情况;前视距离设置过小,车辆会在短时间内根据预瞄点频繁调整前轮转角,影响车辆行驶的稳定性。前视距离L可表示为与车速相关的线性函数:

式中Lmin为最小前视距离,m;min为最小车速,m/s;为前视距离系数。
公式(4)将速度作为调整前视距离的直接因素,而拖拉机在田间机耕道或不规则田块作业时,目标路径崎岖多弯,车辆常以较低速度行驶,仅依赖车速而忽略行驶道路的曲度对前视距离的影响,对目标路径的跟踪不够精确。
基于已有研究[16-19],以公式(4)为基础,本文提出综合考虑目标路径弯曲度和车辆自身行驶位姿等因素确定前视距离:先根据农机的参数、实时位置、车速等确定前视区域,然后对前视区域内所有路径点的曲度求和表征目标路径的弯曲程度,根据弯曲程度计算预瞄点,从而确定前视距离L和前视角,最后基于纯追踪控制算法计算出前轮转角前馈量。
1.2.2 前视区域及预瞄点的确定
驾驶员在驾车行驶时,会注视目标路径的一段范围,这段范围被称为前视区域(图2)。
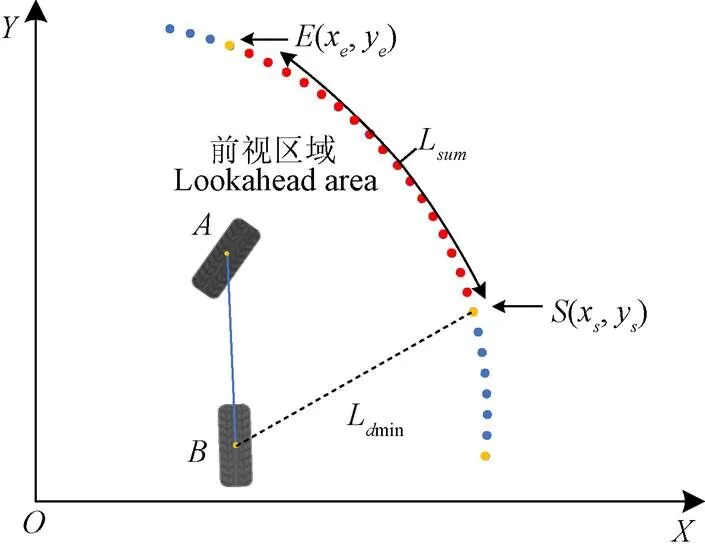
注:S(xs,ys)为前视区域起点;E(xe,ye)为前视区域终点;Lsum为前视区域积分长,m;Ldmin为最小前视距离,m。
前视区域起点(x,y)由最短前视距离Lmin确定,为拖拉机前进方向上与农机后轮中心距离大于Lmin的最近路径点。前视区域的长度L将根据当前车速进行动态调整。车速越快、道路越平缓,前视区域越广,相反前视区域越小,结合上述分析,并参考文献[20],提出前视区域积分长度的计算公式为

式中min_sum为前视区域的最小积分长,m;max_sum为前视区域的最大积分长,m;,为预设常数,根据实车试验确定。
预瞄点是驾驶员在前视区域内选取的要追踪的路径点。结合上文分析可知,纯追踪控制算法跟踪性能的关键在于预瞄点的选择。研究表明[21],目标路径弯曲程度越大,前视距离越小,由此可得预瞄点应更靠近前进方向前视区域起点的位置。根据这一思想,确定预瞄点首先要确定目标路径弯曲度。目标路径弯曲度的计算原理图见图3。

注:M(xm,ym)、Q(xq,yq)和P(xp,yp)为前视区域内相邻的3个路径点;βi是MQ相对于QP的夹角,(°)。
将前视区域的目标路径离散成若干个路径点,用折线将相邻路径点连接,相邻折线的夹角β为相邻路径点方向角的改变量,前视区域的路径弯曲度定义为

式中为前视区域内的折线数量,数值由前视区域内离散路径点的数量确定。
相邻折线间的夹角β由公式(7)计算:

前视距离L随路径弯曲度变化而变化,即预瞄点在前视区域内距前视区域起点的曲线长度L随目标路径弯曲度变化而变化:
式中min、max为的最小和最大值,为预设常数。
为了确保预瞄点随路径弯曲度变化而连续变化,的取值应与L的最大值相对应,则有

L确定后便可在前视区域内确定预瞄点,进而确定前视距离L与车辆前视角,再根据公式(3),即可得出车辆前轮转角前馈量1。
1.3 模糊控制器设计
由于纯追踪控制算法在追踪预瞄点的过程中没有考虑农机当前位姿与参考路径的误差,可能会导致农机行驶过程中存在稳态误差,因此需要进一步改进跟踪控制算法。本研究设计一种基于模糊控制算法的模糊控制器实现对农机前轮转角的补偿,既考虑车辆的当前位置误差,又考虑前方目标路径弯曲度对转向的影响,进而提升跟踪精度。本文选用二维模糊控制器确定前轮转角补偿量δ:先计算农机实时位置与目标路径的横向误差与航向误差作为模糊控制器的输入量,模糊控制器对输入量进行模糊化处理,利用模糊规则进行模糊推理,最后进行反模糊化输出前轮转角补偿量δ。
前轮转角δ、前轮转角前馈量1与前轮转角补偿量δ满足以下关系:

1.3.1 输入输出变量模糊化
以横向误差e和航向误差e作为模糊控制器的输入,前轮转角补偿量δ作为输出。首先对输入、输出变量进行模糊化处理。其中e、e、δ的论域由试验确定。
1)横向误差e。基本论域为[−12 cm,12 cm],量化等级为{−12 cm,−8 cm,−4 cm,0 cm,4 cm,8 cm,12 cm}={NB,NM,NS,ZO,PS,PM,PB},量化因子取1。
2)航向误差e。基本论域为[−6°,6°],量化等级为{−6°,−4°,−2°,0°,2°,4°,6°}={NB,NM,NS,ZO,PS,PM,PB},量化因子取1。
3)前轮转角补偿量δ。基本论域为[−3.6°,4.8°],量化等级为{−3.6°,−2.4°,−1.2°,0°,1.2°,2.4°,3.6°}={NB,NM,NS,ZO,PS,PM,PB},量化因子取1。
本研究中输入输出量的隶属函数均选择三角隶属度函数。横向误差e与航向误差e计算方法[22]如图4所示。

注:R(xr,yr)为目标路径点中距离车辆后轮中心的最近点;T(xt,yt)为目标路径点中距离车辆后轮中心的次近点;φ为RT与正北方向的顺时针夹角,(°);ec为横向误差,cm;eh为航向误差,(°);
车辆后轮中心到线的距离即为农机行驶过程中的横向误差e,根据式(11)计算。

1.3.2 模糊控制规则设计
模糊控制规则是将人工驾驶策略以及专家知识经验,利用模糊集合理论和语言变量转化为数值运算,进而利用计算机实现模糊自动控制[23]。
前轮转角自动补偿模糊控制规则的基本原则为:当农机与目标路径的横向误差为负值较大、航向误差为负值较大时,前轮转角补偿量应输出为正值较大。当农机与目标路径的横向误差为正值较大、航向误差为正值较大时,前轮转角补偿量应输出为负值较大。根据农机不同的位置状态共得出49条控制规则,见表1。

表1 前轮转角补偿量模糊控制规则
注:NB为负大;NM为负中;NS为负小;ZO为零;PS为正小;PM为正中;PB为正大;模糊语言描述为:横向误差为正大(PB)或负大(NB),航向误差为正大(PB)或者负大(NB),那么前轮转角为负大(NB)或者正大(PB)。
Note: NB is negative big; NM is negative middle; NS is negative small; ZO is zero; PS is positive small; PM is positive middle; PB is positive big; The fuzzy language is described as: if the lateral error is positive big (PB) or negative big (NB), and the heading error is positive big (PB) or negative big (NB), then the front wheel rotation angle is negative big (NB) or positive big (PB).
2 算法验证
2.1 试验平台
为验证变曲度路径跟踪算法,以DF2204无级变速拖拉机为试验平台开展导航试验。试验地点为北京市密云区河南寨。

1.导航天线 2.车载控制器 3.电动方向盘 4.华测组合导航 5.角度传感器
拖拉机为后轮驱动,阿克曼转向,轴距3.042 m,前轮轮距1.92 m,后轮轮距1.90 m,单边制动转向半径5 m,前轮内侧最大转角50°。工控机等车载控制器通过控制局域网(Controller Area Network,CAN)控制发动机、变速箱及液压提升系统。
GNSS导航系统为华测CGI-610,获取拖拉机的实时位姿信息。华测CGI-610内置高精度MEMS陀螺仪与加速度计,可提供准确的姿态和厘米级位置信息,定位精度10 mm,航向精度0.2°/(为双天线基线长),数据传输频率为25 Hz。GNSS天线安装在驾驶室顶部两侧,双天线相位中心连线与农机中轴线垂直。设备主机与农机固连,安装底面与农机驾驶室底面平行,主机坐标系三轴指向与农机车体坐标系三轴指向一致。
2.2 试验设置
试验在颠簸不平的旱地田块开展,通过人工驾驶拖拉机在田块边缘采集带有GNSS轨迹点序列的目标路径,通过数据可视化分析,将目标路径段分为变道曲线段、掉头曲线段、直线段及S曲线段。采样间隔设置为0.1 m。路径全长约为250 m。图6为采集轨迹点的可视化结果。

图6 采样路径
在相同曲度路径下,车速设定为1.0 m/s,将本研究提出的控制算法与固定前视距离的纯追踪算法进行对比试验。文献[24]提出前视距离略大于轴距时有较好的跟踪效果,结合试验农机机身参数,对比试验中固定前视距离L依次设定为2.0、3.5和5.0 m。
Lmin参照农机前轮轮距设定为2 m,min设定为目标路径前视区域弯曲度之和的最小值,max设定为目标路径前视区域弯曲度之和的最大值。经试验调参min设定为0.5 m/s,max设定为4.0 m/s,min_sum与max_sum分别设定为0.8、2.2 m。根据公式(7)计算参数为0.4,为0.6。
2.3 试验结果与分析
图7为农机以1.0 m/s的速度行驶时本文控制方法与3种固定前视距离的纯追踪控制方法的跟踪轨迹及局部放大图。图8为1.0 m/s速度下各控制方法的横向误差变化。图9、图10分别为农机在1.0 m/s速度下使用本文控制方法的前视距离随目标路径弯曲度的变化曲线和前轮转角前馈量与补偿量的变化曲线。表2、表3分别为固定前视距离的纯追踪算法和本文控制算法在1.0 m/s速度下的横向误差统计结果。
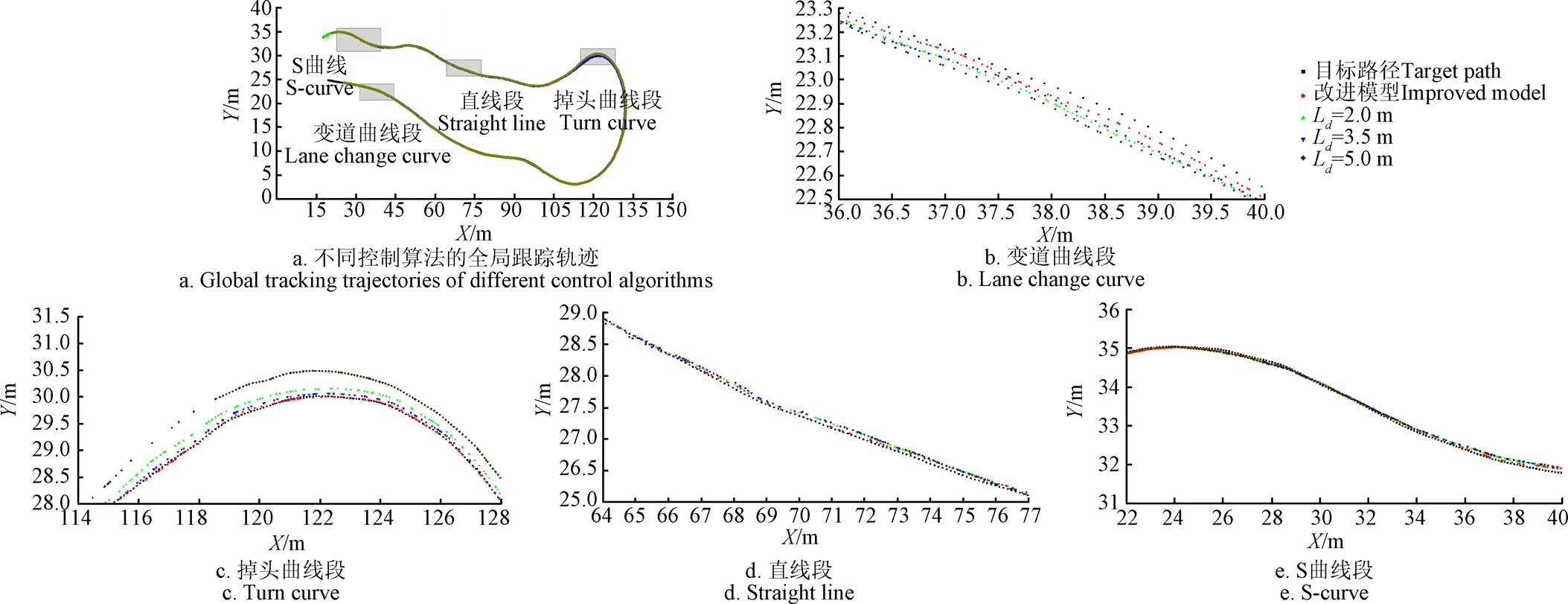
图7 跟踪轨迹及局部放大图

图8 不同控制算法的横向误差

图9 前视距离随前视区域曲度的变化

图10 前轮转角前馈量与补偿量在行驶过程中的变化
由图7、图8可以看出,本文考虑目标路径弯曲度的跟踪控制方法均优于固定前视距离的纯追踪算法。在行驶速度为1.0 m/s的变曲度路径跟踪过程中,考虑目标路径弯曲度控制算法的平均绝对误差为2.7 cm,最大横向误差为10.8 cm,均方根误差为3.4 cm。固定前视距离为2.0、3.5和5.0 m的平均绝对误差平均值分别为7.1、5.6和11.8 cm,最大横向误差平均值分别为25.2、18.9和55.7 cm,均方根误差平均值分别为5.5、4.9和19.4 cm。试验结果表明,本文算法各项指标均优于固定前视距离的纯追踪控制算法,其中均方根误差平均值较3种固定前视距离的纯追踪控制算法分别降低了38.18%、30.61%和82.47%,均降低30%以上,有效提高了路径跟踪精度。由图9看出,本文算法能根据目标路径道路弯曲度自主调整前视距离,前视距离在1.8~3.2 m之间自适应调整,对目标路径具有一定范围内的预测性。由图10可以看出,在农机行驶的全过程中,本文算法能根据实时位置误差对前轮转角进行补偿,实时调整农机位姿,减少行驶误差。

表2 固定前视距离的纯追踪算法跟随变曲度路径的横向误差
考虑到拖拉机在田内作业的实际情况,不同的作业任务行驶速度不同,在1.5、2.0和3.0 m/s的速度下开展3组试验,横向误差统计结果如表3。

表3 不同行驶速度的横向误差统计结果
试验结果表明,本文提出的考虑目标道路弯曲度的跟踪控制算法能够适应多种作业速度场景,其中3.0 m/s速度下的最大绝对值误差均值控制在19.9 cm,平均绝对误差平均值为4.0 cm,均方根误差均值为5.0 cm,表明该导航控制算法具有较好的导航效果[15],对不同农机作业速度有着较好的适应性。
3 结 论
1)针对拖拉机传统跟踪控制算法在曲线路径下作业精度低、速度适应性较差的问题,本研究针对前轮转角提出一种前馈-补偿策略的路径跟踪控制方法,以传统纯追踪控制方法为基础,通过农机行驶速度动态调整前视区域,根据前视区域的道路弯曲度计算预瞄点,从而动态确定前视距离,通过纯追踪模型计算前轮转角前馈量,再利用模糊控制器通过农机当前位置的横向和航向误差实现对前轮转角的补偿。
2)行驶速度为1.0、1.5、2.0和3.0 m/s时的最大跟踪误差分别为10.8、16.8、16.4和19.9 cm,平均绝对误差分别为2.7、2.7、3.3和4.0 cm,均方跟误差平均值分别为3.4、3.7、4.6和5.0 cm。
[1] Lowenberg-DeBoer J, Huang I Y, Grigoriadis V, et al. Economics of robots and automation in field crop production[J]. Precision Agriculture, 2020, 21(2): 278-299.
[2] Kelc D, Stajnko D, Berk P, et al. Reduction of environmental pollution by using RTK-navigation in soil cultivation[J]. International Journal of Agricultural and Biological Engineering, 2019, 12(5): 173-178.
[3] 刘兆朋,张智刚,罗锡文,等. 雷沃ZP9500高地隙喷雾机的GNSS自动导航作业系统设计[J]. 农业工程学报,2018,34(1):15-21.
Liu Zhaopeng, Zhang Zhigang, Luo Xiwen, et al. Design of automatic navigation operation system for Lovol ZP9500 high clearance boom sprayer based on GNSS[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(1): 15-21. (in Chinese with English abstract)
[4] 徐广飞,陈美舟,金诚谦,等. 拖拉机自动驾驶关键技术综述[J]. 中国农机化学报,2022,43(6):126-134.
Xu Guangfei, Chen Meizhou, Jin Chengqian, et al. A review of key technology tractor automatic driving[J]. Journal of Chinese Agricultural Mechanization, 2022, 43(6): 126-134. (in Chinese with English abstract)
[5] Hameed I A, la Cour-Harbo A, Osen O L. Side-to-side 3D coverage path planning approach for agricultural robots to minimize skip/overlap areas between swaths[J]. Robotics and Autonomous Systems, 2016, 76: 36-45.
[6] 吴才聪,王东旭,陈智博,等. SF2104拖拉机自主行驶与作业控制方法[J]. 农业工程学报,2020,36(18):42-48.
Wu Caicong, Wang Dongxu, Chen Zhibo, et al. Autonomous driving and operation control method for SF2104 tractors[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(18): 42-48. (in Chinese with English abstract)
[7] Netto M, Blosseville J M, Lusetti B, et al. A new robust control system with optimized use of the lane detection data for vehicle full lateral control under strong curvatures[C]//2006 IEEE Intelligent Transportation Systems Conference. Toronto, 2006: 1382-1387.
[8] 黄沛琛,罗锡文,张智刚. 改进纯追踪模型的农业机械地头转向控制方法[J]. 计算机工程与应用,2010,46(21):216-219.
Huang Peichen, Luo Xiwen, Zhang Zhigang. Control method of headland turning based on improved pure pursuit model for agricultural machine[J]. Computer Engineering and Applications, 2010, 46(21): 216-219. (in Chinese with English abstract)
[9] 唐小涛,陶建峰,李志腾,等. 自动导航插秧机路径跟踪系统稳定性模糊控制优化方法[J]. 农业机械学报,2018,49(1):29-34.
Tang Xiaotao, Tao Jianfeng, Li Zhiteng, et al. Fuzzy control optimization method for stability of path tracking system of automatic transplanter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(1): 29-34. (in Chinese with English abstract)
[10] Nagasaka Y, Saito H, Tamaki K, et al. An autonomous rice transplanter guided by global positioning system and inertial measurement unit[J]. Journal of Field Robotics, 2009, 26(6/7): 537-548.
[11] 张华强,王国栋,吕云飞,等. 基于改进纯追踪模型的农机路径跟踪算法研究[J]. 农业机械学报,2020,51(9):18-25.
Zhang Huaqiang, Wang Guodong, Lü Yunfei, et al. Agricultural machinery automatic navigation control system based on improved pure tracking model[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(9): 18-25. (in Chinese with English abstract)
[12] 陈无畏,李进,王檀彬,等. 视觉导航智能车辆的路径跟踪预瞄控制[J]. 机械工程学报,2008,44(10):277-282.
Chen Wuwei, Li Jin, Wang Tanbin, et al. Preview control for road following of vision guided intelligent vehicle[J]. Chinese Journal of Mechanical Engineering, 2008, 44(10): 277-282. (in Chinese with English abstract)
[13] 李革,王宇,郭刘粉,等. 插秧机导航路径跟踪改进纯追踪算法[J]. 农业机械学报,2018,49(5):21-26.
Li Ge, Wang Yu, Guo Liufen, et al. Improved pure pursuit algorithm for rice transplanter path tracking[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(5): 21-26. (in Chinese with English abstract)
[14] Yang Y, Li Y, Wen X, et al. An optimal goal point determination algorithm for automatic navigation of agricultural machinery: Improving the tracking accuracy of the pure pursuit algorithm[J]. Computers and Electronics in Agriculture, 2022, 194: 106760.
[15] Bell T. Automatic tractor guidance using carrier-phase differential GPS[J]. Computers and Electronics in Agriculture, 2000, 25(1/2): 53-66.
[16] 杨阳阳,何志刚,汪若尘,等. 基于转角补偿的智能车辆循迹控制系统[J]. 仪表技术与传感器,2019(5):73-77.
Yang Yangyang, He Zhigang, Wang Ruochen, et al. Path tracking control system of intelligent vehicle based on steering angle compensation[J]. Instrument Technique and Sensor, 2019(5): 73-77. (in Chinese with English abstract)
[17] Wang J, Steiber J, Surampudi B. Autonomous ground vehicle control system for high-speed and safe operation[J]. International Journal of Vehicle Autonomous Systems, 2009, 7(1/2): 18-35.
[18] Shi B, Meng W, Liu H, et al. A normalized approach for evaluating driving styles based on personalized driver modeling[C]//Proceedings of SAE-China Congress 2014: Selected Papers. Berlin, Heidelberg, Springer, 2015: 433-444.
[19] Li G, Zhu F, Qu X, et al. Driving style classification based on driving operational pictures[J]. IEEE Access, 2019, 7: 90180-90189.
[20] 赵凯,朱愿,冯明月,等. 基于多点序列预瞄的自动驾驶汽车路径跟踪算法研究[J]. 汽车技术,2018(11):1-5.
Zhao Kai, Zhu Yuan, Feng Mingyue, et al. Research on path tracking algorithm of autonomous vehicles based on multi-point sequence preview[J]. Automobile Technology, 2018(11): 1-5. (in Chinese with English abstract)
[21] 邵明玺,辛喆,江秋博,等. 拖拉机后悬挂横向位姿调整的模糊PID控制[J]. 农业工程学报,2019,35(21):34-42.
Shao Mingxi, Xin Zhe, Jiang Qiubo, et al. Fuzzy PID control for lateral pose adjustment of tractor rear suspension[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(21): 34-42. (in Chinese with English abstract)
[22] 中国国家标准化管理委员会.自走式农业机械导航系统作业性能及评价方法(GB/T 37164—2018)[S]. 北京:中国标准出版社. 2018.
[23] 贾全. 拖拉机自动导航系统关键技术研究[D]. 北京:中国农业机械化科学研究院,2013.
Jia Quan. Study on Key Technology of Tractor Auto-navigation System[D]. Beijing: Chinese Academy of Agricultural Mechanization Sciences, 2013. (in Chinese with English abstract)
[24] Petrinec K, Kovacic Z, Marozin A. Simulator of multi-AGV robotic industrial environments[C]//IEEE International Conference on Industrial Technology. Maribor, Slovenia: IEEE, 2003, 2: 979-983.
Variable curvature path tracking control for the automatic navigation of tractors
Wu Caicong, Wu Sixian, Wen Long, Chen Zhibo, Yang Weizhong, Zhai Weixin
(1.,,100083,;2.,,100083,)
The current control accuracy of automatic navigation curve tracking in tractors cannot fully meet the production needs in modern agriculture.In this study, a tracking control system of variable curvature path was presented as the front wheel angle feedforward compensation. Firstly, a comprehensive evaluation was made on the influence of agricultural machinery operating speed and reference path curvature on the foresight distance. The lookahead area was then altered to compute the preview point, in order to realize the dynamic adjustment of the lookahead distance and the feedforward amount of the front wheel angle. Furthermore, the lookahead distance posed a significant effect on the speed of the vehicle. Specifically, the vehicle often traveled at a lower speed on the rugged and curved reference path, when the tractor was working on the field mechanized road or irregular fields. However, the lookahead distance was typically expressed as a linear function that related to the speed of the vehicle. The inaccurate tracking of the reference path was normally obtained due to the weak coupling, if only the speed of the vehicle without considering the curvature of the driving road on the lookahead distance. Therefore, the varying lookahead distance was proposed to depend on the curvature of the path. Meanwhile, the varying curve length of the preview point in the lookahead area was relative to the starting point of the lookahead area depending on the curvature of the reference path. Secondly, the steady-state error was often observed in the driving process of the agricultural machinery, because the pure pursuit algorithm failed to consider the deviation between the current pose and the reference path of the agricultural machinery, when tracking the preview point. An improved controller with the fuzzy control algorithm was designed to realize the compensation of the front wheel angle of agricultural machinery. Specifically, the lateral error and heading error of the agricultural machinery were used as the inputs of the fuzzy controller, and the compensation amount of the front wheel angle was used as the output. The sum of the feedforward and compensation amount of the front wheel angle were used as the control amount of the front wheel angle of the vehicle. This control amount considered the lateral error and heading error of the current position of the vehicle, together with the influence of the forward reference path on the steering of the agricultural machinery. The tracking accuracy was then greatly improved in the agricultural machinery. Taking the DF2204 continuously variable transmission tractor as the test platform, an automatic navigation system was developed to verify the practicability of the path tracking algorithm. 21 sets of variable curvature path tracking experiments were carried out in Beijing Miyun Experimental Field. The results indicate that the average absolute errors were 2.7, 2.7, 3.3, and 4.0 cm, and the average root errors were 3.4, 3.7, 4.6, and 5.0 cm, respectively, when the tractor moved at 1.0, 1.5, 2.0, and 3.0 m/s. The tracking control approach of variable curvature path in the autonomous navigation can be expected to effectively increase the tracking accuracy of agricultural machinery curve paths and the utilization rate of farmland.
tractors; automatic navigation; path tracking; variable curvature; lookahead distance; fuzzy control
10.11975/j.issn.1002-6819.2022.21.001
S147.2
A
1002-6819(2022)-21-0001-07
吴才聪,吴思贤,文龙,等. 拖拉机自动导航变曲度路径跟踪控制[J]. 农业工程学报,2022,38(21):1-7.doi:10.11975/j.issn.1002-6819.2022.21.001 http://www.tcsae.org
Wu Caicong, Wu Sixian, Wen Long, et al. Variable curvature path tracking control for the automatic navigation of tractors[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(21): 1-7. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2022.21.001 http://www.tcsae.org
2022-07-18
2022-09-09
国家重点研发计划项目(2021YFB3901302)
吴才聪,教授,博士生导师,研究方向为农机大数据、农机导航与位置服务。Email:wucc@cau.edu.cn
猜你喜欢
小学生学习指导·爆笑校园(2019年6期)2019-09-10
饮食保健(2019年2期)2019-01-12
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年1期)2017-11-24
中国社区医师(2017年4期)2017-01-21
红蜻蜓·低年级(2015年11期)2016-02-02
天津医科大学学报(2015年2期)2015-12-22
舰船科学技术(2015年8期)2015-02-27
中国自行车·骑行风尚(2014年4期)2014-10-10
中国中医药现代远程教育(2014年15期)2014-03-01
