
基于人工智能的火电机组负荷频率自抗扰控制系统
2022-02-14 11:17赵晋宇赵磊何志明郭健
电子制作 2022年2期
赵晋宇,赵磊,何志明,郭健
(国家电投集团内蒙古白音华煤电有限公司坑口发电分公司,内蒙古锡林郭勒盟西乌珠穆沁旗,026299)
0 引言
我国经济社会的发展和人们的日常生活离不开火电行业,火电行业是社会发展的动力,火电发电是我国的主要电源。火电发电的燃料以煤为主,一般电力行业会将煤放入锅炉中进行燃烧,保证燃烧的化学能可以转化为热能,通过汽轮机将热能转化为机械能,最终通过发电机将机械能转化为电能,这就是电能产生的主要过程。火电机组负荷频率是影响电能质量的一个重要因素,火电机组的负荷频率的变化情况影响电力系统的稳定性,为了保障电力系统能够正常运行,需要设计一个火电机组负载频率自抗扰控制系统,降低火电机组负荷频率的波动幅度。传统的火电机组负荷频率自抗扰控制系统构建的模型不稳定,在建模时参数存在一定的偏差,导致控制效果不佳。根据传统系统存在的问题,设计一个全新的自抗扰控制系统,将人工智能技术运用到火电机组自抗扰控制系统中,能够准确测量火电系统运行的参数值,可以将各项指标控制在正常范围值之内。人工智能技术融合了多项高新技术,普遍运用在经济政治决策和控制系统中,通过计算机的软硬件模拟某些智能行为,使智能行为满足人们的需求,研究基于人工智能的火电机组负荷频率自抗扰控制系统。
1 基于人工智能的火电机组负荷频率自抗扰控制系统硬件设计
由于基于人工智能的火电机组负荷频率自抗扰控制系统主要依托计算机实现,系统的硬件主要包括内存储器、CPU、磁盘和自抗扰控制器等多个硬件,系统的内存储器主要是存放火电系统运行时各个指标的参数数据,系统的磁盘具有输出和输入功能,是数据传输的通道。具体的系统硬件组成结构如图1所示。
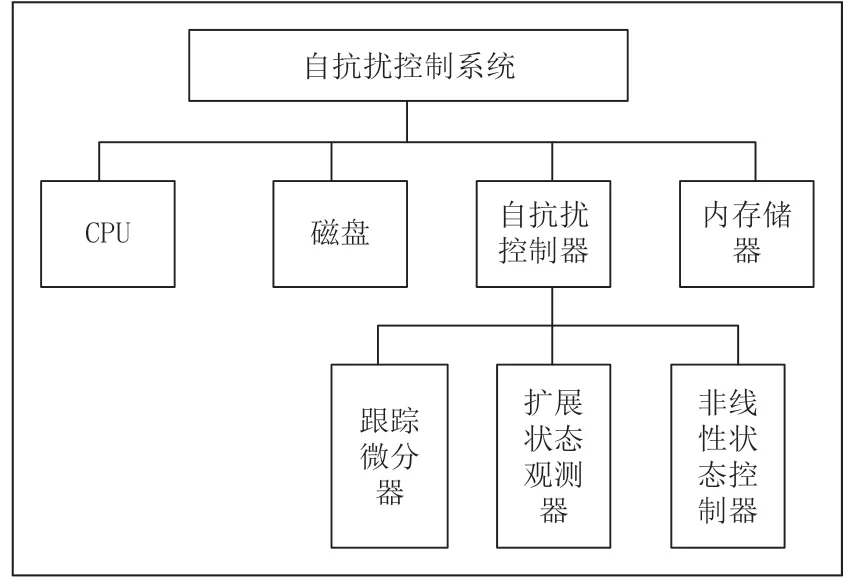
图1 自抗扰控制系统硬件结构
自抗扰控制系统的硬件是系统的核心部分之一,硬件的性能能够影响系统的整体运行效果,在设计时,选择性能好并且灵活性强的硬件。火电机组负荷频率自抗扰控制系统根据具体的火电系统运行情况进行升级优化,灵活性较强的硬件设施便于自抗扰控制系统的优化。其中自抗扰控制器是硬件结构的核心部分,具有三个子控制器,每一个控制器的控制作用均不相同,跟踪微分器能够控制负荷频率发出的信号,扩展状态观测器能够有效估计未知运行干扰因素,非线性状态控制器将控制对象的干扰因子进行串联,分析每个干扰因子之间的关系。采用自抗扰控制器采集每一个干扰因子,分析干扰因子的数据特征,基于人工智能的火电机组负荷率自抗扰控制系统的硬件设计为系统运行提供了一个稳定的运行环境。
2 基于人工智能的火电机组负荷频率自抗扰控制系统软件设计
■2.1 设置负荷频率数据采集模式
首先根据实际的火电机组负荷运行状态,设置相应的火电机组负荷运行数据采集模式,通过运行模式反馈的参数值,判断火电机组负荷运行是否处于稳定状态。火电机组负荷频率的数据能够有效反馈火电系统的运行效果和运行质量,采集精准的火电机组负荷频率数据尤为重要。我国火电系统一般采用低负荷运行方式,火电机组的调峰深度值处于一个额定负荷状态,调峰的范围一般在660~270MW之间,如果火电机组的调峰值处于一个正常范围内,能够有效降低运行负荷运行成本。火电机组负荷每一种运行程序都会产生一定的数据,各个指标参数也会发生一定的变化,需要根据数据的特点设置不同的数据采集模式,提高采集数据的精准性。采集的运行参数数值如表1所示。
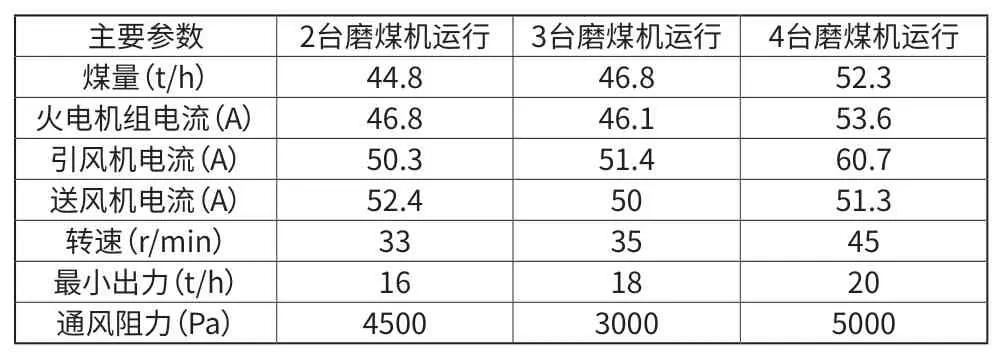
表1 火电机组运行参数数据
由表1可知,火电系统在发电时,一般会采用多个磨煤机运行,不同型号的磨煤机进行组合时,各个参数指标就会发生一定的变化,火电系统的动能也会随之产生变化。上表的指标参数数据表示火电机组在正常运行中的各个参数指标,系统的数据采集模式需要采集每一个阶段的实时数据,如果火电机组负荷运行受到干扰因素的影响,指标数据会发生变化,控制系统可以根据数据的变动,排查火电机组的干扰因素。火电机组负荷运行是整个火电系统的核心部分,负荷的频率波动情况表示整个火电系统运行的情况,系统中设置的负荷频率数据采集模式,负荷频率波动时,可能产生的数据类型不同,数据类型包括文本数据和数值数据等多种形式,控制系统中数据采集模式需要根据数据的类型进行转化。数据是整个控制系统的运行基础,需要数据作为控制支撑,数据能够真实反映火电系统的运行情况、火电内部各个机组之间的关系以及受干扰程度,控制系统将采集数据进行筛选、处理和分析,最终控制系统会根据分析出来的实际情况实施控制。火电机组负荷频率波动幅度是系统数据采集模块的中心,它关系整个电力的质量,数据采集模式的设置为系统的软件设计提供了一个很好的基础,能够确保数据的稳定性和准确性。
■2.2 基于人工智能构建火电系统线性模型
在进行火电机组负荷自抗扰控制系统设计时,采用人工智能技术构建火电系统线性模型,用线性模型解决火电机组负荷频率波动幅度的问题。火电系统的线性模型实际是为了稳定控制器,通过控制器控制火电机组各个负荷频率,现阶段的自抗扰控制系统由于系统性能较差,操作比较复杂,导致控制器在控制时,会出现不稳定的情况。为了提高火电机组负荷频率自抗扰控制系统的性能,采用先进的人工智能技术提高控制系统的性能,保证系统的稳定性。通过构建的线性模型解决控制器中的参数值,能够优化控制器结构。首先判断线性观测器对总干扰的估计误差数值,如公式(1)所示。

在公式(1)中,Q表示总干扰估计误差数值,W表示控制过程的实际输出值,R表示观测出来的虚拟控制量,E表示监测控制时间,F表示实际控制值。自抗扰系统在对负荷频率监控时,采集数据受到外界因素的影响造成一定的干扰,在分析结果时,产生一定的偏差,此时需要计算出误差值,误差值越精准,控制系统的控制效果就会更加明显。利用人工智能技术能够为火电机组负荷频率自抗扰控制系统提供系统动力,全面考虑控制系统的运行速度与监测质量的关系,对系统进行全面的描述,系统的运行速度可能会影响系统的自抗扰控制能力。利用函数计算出系统动能和势能的差值,差值是保证系统稳定运行的基础,动能和势能差值如公式(2)所示。

在上述公式中,T表示动能和势能的差值,Y表示自抗扰控制系统的动能,U表示自抗扰系统的势能。火电系统构成的部件相对比较复杂,火电机组负荷频率波动的幅度也会受到各个部件运行的影响,需要分为不同的阶段进行自抗扰控制,将火电系统根据运行的模式和运行特点分成多个运行区域,对每一个区域实行实时监控。自抗扰控制系统是将火电机组负荷频率控制在恒定的频率范围之内,并且保证在负荷运行的条件下,火电系统能够按照计划运行。基于人工智能构建的线性模型是将影响火电机组负荷频率的因素进行整合,统计出每一个因素影响的误差值或者每一个运行流程产生的误差值,线性模型能够有效计算出精准的误差值。基于人工智能构建的线性模型能够有效监测出火电机组负荷运行的实时数据和历史数据,充分挖掘出部分潜在数据,为计算误差值提供依据,构建的线性模型能够满足火电机组负荷运行条件,一旦负荷运行发生故障,系统就会及时启动控制功能,将运行的指标参数控制在正常范围内,能够有效提升火电系统运行效率。
■2.3 遗传算法控制火电机组负荷频率
设计的火电机组负荷频率自抗扰控制系统采用遗传算法对火电机组负荷频率进行控制,遗传算法是对遗传算子进行数学分析,转化为数学函数问题。遗传算法在火电机组负荷频率自抗扰系统中起到一个优化的作用,保障系统能够有效对负荷运行频率进行控制,达到最优的控制效果。遗传算法是以生物进化论理论为基础,将生物进化论理论过程通过数学的表达方式进行描述,其中遗传算法提出适者生存的概念,主要作用是在运算过程中保留最优目标值,将多个目标值进行转化,形成一组新的表达形式,计算出每一组中的最优解,将每组的最优解进行重新排列整合,最终得到全局最优解。将影响火电机组负荷频率波动幅度的因素作为遗传算法中的初始化种群,需要对影响因素进行适应度评价,得出一个适应度评价指标。从这些影响因素因子中选择出适应度较好的因子,每个因子会根据运行的实际情况进行交叉和变异,通过一系列操作,这些因子会产生出新因子,进行迭代计算,通过不断地反复计算最终得到最优结果。火电机组负荷在运行的过程中,可能会受到很多因素的影响,需要在这些因素中选取适应度最好的因素,将因素看成是遗传算法中的个体,算出初始群中个体能够被选中的概率,计算的概率公式如公式(3)所示。

在上述公式中,将初始化种群的大小用n表示,每一个个体的适应度值设置为A,P表示初始群中个体能够被选中的概率。公式(3)中的描述,采用的是适应度比例方法进行个体选取,还可以采用随机遍历抽样法和分层抽样方法进行选取,选取出来的个体进行交叉转换。在遗传算法的基础上,采用基本粒子群算法,对系统的空间区域进行划分,将目标控制空间看成是一个空间维度,空间中的粒子群体可以用公式(4)表示。

在上述公式中,G表示粒子群,D表示单个粒子,i表示粒子数量,计算出每一个粒子的空间维度向量值,如公式(5)所示。

在上述公式中,H表示整体粒子群空间维度向量值,K表示单个粒子向量值。可以将系统的区域空间进行划分成单个的目标区域,分析目标区域中的因子个体,采用遗传算法进行局部优化,最终可获得整体区域的最优解。采用遗传算法控制火电机组负荷频率,将频率波动的幅度控制在最小范围之内,能够及时控制其他干扰因素的影响,使控制系统的性能达到最优效果。
3 实验与分析
■3.1 实验准备
为检测基于人工智能设计的火电机组负荷频率自抗扰控制系统的性能,展开测试实验,本次实验分别采用传统系统和本文系统对火电机组负荷运行进行测试。首先选取某一个火电站,读取火电站运行时电机的主要参数值,电机主要参数如表2所示。
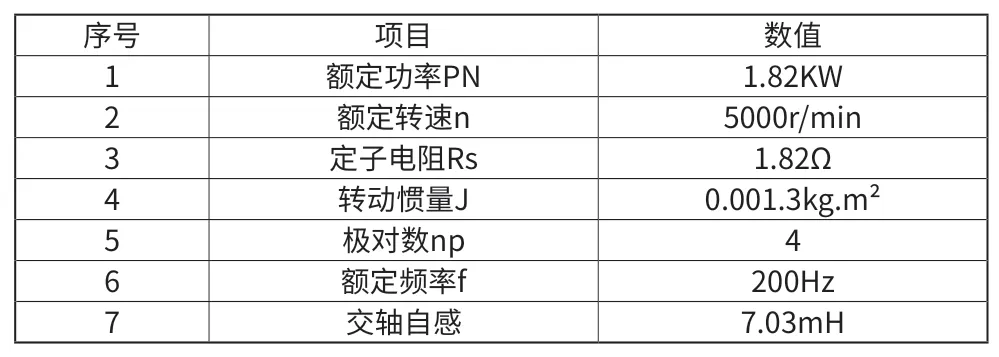
表2 电机主要参数
根据表2可知,为保证实验的准确性,设置参数指标一致的电机作为本次实验主要设备。在本文实验中选用两种参数值和性能一样的电机,将两个电机作为实验的研究对象,比较两种系统的控制响应时间。将影响火电机组负荷频率的因子一共分为10组,每一组都包含不同数量的干扰因子。
■3.2 实验结果
采用本文系统和传统系统对火电机组负荷运行进行控制,比较控制响应时间,将设置的10组干扰因子分别用T1、T2、T3、T4、T5、T6、T7、T8、T9、T10表 示,计算自抗扰控制系统分别控制这5组干扰因子的响应时间,控制响应时间如图2所示。

图2 控制响应时间结果
根据图2可知,在每组干扰因子数量相同的情况下,本文系统的控制响应时间比传统系统的控制响应时间更短,经计算,本文系统的平均控制响应时间为21s,传统系统的平均控制响应时间为33.2s,本文系统的控制响应时间比传统系统缩短12.2s,基于人工智能设计的火电机组负荷频率自抗扰控制系统控制响应的时间更快,能够及时做出控制反应,说明本文系统的运行性能效果更好。
4 结束语
本文研究基于人工智能设计的火电机组负荷频率自抗扰控制系统,能够有效控制火电机组负荷频率波动幅度,抗干扰能力好,保证火电系统能够正常运行。由于设置的自抗扰控制系统的参数种类较多,一旦参数指标发生偏差会影响整个控制系统,采用遗传算法解决自抗扰控制系统的稳定性。本文基于人工智能设计的自抗扰控制系统还存在一些问题,设置的自抗扰控制器参数种类较多,增加操作的难度,希望在下一次研究中简化控制器参数类型,降低操作难度,不断优化火电机组负荷频率自抗扰控制系统的性能。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
包装工程(2022年11期)2022-06-20
网络空间安全(2019年8期)2019-03-18
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03
智富时代(2018年4期)2018-07-10
智富时代(2018年4期)2018-07-10
科学家(2016年13期)2017-09-29
科技传播(2012年10期)2012-06-06
