基于雨量光线传感器的雨刮灯光智能控制系统
2022-02-14 07:36韩庆福韩大伟范安军徐成竹张龙中
汽车电器 2022年1期
韩庆福, 韩大伟, 范安军, 徐成竹, 张龙中
(北京福田戴姆勒汽车有限公司, 北京 101400)
1 前言
随着车辆智能辅助驾驶应用程度的提高, 人们对车辆自动化控制的要求也越来越高。 针对车辆传统雨刮系统,通过人为判断前挡风玻璃承受落雨量之模糊程度, 再以手动方式调整雨刷对应的操作开关, 在某些场景下, 手动操作雨刮控制系统有可能会使驾驶员手忙脚乱, 有可能会给车辆的行驶安全带来隐患。 因此, 车辆智能雨刮、 灯光控制系统, 对车辆行驶安全尤为重要。
车辆自动雨刮系统可以免除驾驶员手动操作雨刮开关的麻烦, 有效提高行车的安全性及汽车雨刮系统的可靠性;车辆自动灯光控制系统免除驾驶员手动操作灯光开关的麻烦, 当车辆进入车库、 隧道等光线变暗的地方时, 自动灯光感应系统将自动开启车灯, 出来光线变亮的地方时将自动关闭车灯。 为此, 加装自动雨刮、 灯光系统, 为目前各主机厂的开发方向, 且自动雨刷系统也将为车辆智能辅助驾驶提供基础条件。
2 系统设计方案
基于雨量光线传感器开发的雨刮、 灯光智能控制系统(图1), 包括雨量光线传感器 (以下简称RLS)、 车身控制器、 仪表、 雨刮电机、 雨刮连杆系统、 雨刮组合开关、 灯光组合开关、 前照灯和后尾灯。 雨刮组合开关、 灯光组合开关与车身控制器的输入口相连接, 雨量光线传感器通过LIN线与车身控制器相连接, 仪表通过CAN总线与车身控制器相连接, 雨刮电机、 前照灯和后尾灯与车身控制器的输出口相连接。

图1 雨刮灯光智能控制系统
雨量光线传感器采集计算雨量大小、 光照强度大小,转化成雨刮指令及灯光开启指令通过LIN总线发送给车身控制器, 车身控制器根据雨刮指令进行自动雨刮的相关控制动作, 同时根据雨刮组合开关的手动雨刮指令信号进行雨刮的间歇、 低速、 高速的动作。 车身控制器根据灯光开启指令进行自动灯光的相关控制, 开启位置灯和近光灯, 同时根据灯光组合开关的手动灯光指令进行位置灯、 近光灯或远光灯的相关控制, 以实现雨刮、 灯光的自动和手动控制。 仪表显示雨刮灯光控制系统的相关零部件故障, 以提醒用户及时地进行维护。
3 技术方案
3.1 雨量光线传感器的开发
3.1.1 自动灯光请求功能原理
自动灯光功能请求的实现, 通过使用环境光敏二极管感知外界环境光的变化情况, 随着外界光线的变化, 环境光敏二极管采样电压也随之变化, RLS根据采样电压判定外界的环境光光照强度, 并根据程序的控制策略向车身控制器发出相应的位置灯、 近光灯照明指令信号。
自动灯光请求功能系统框图如图2所示。
图2 自动灯光请求框图
自动灯光请求功能应能识别的环境有以下几种, 见表1。
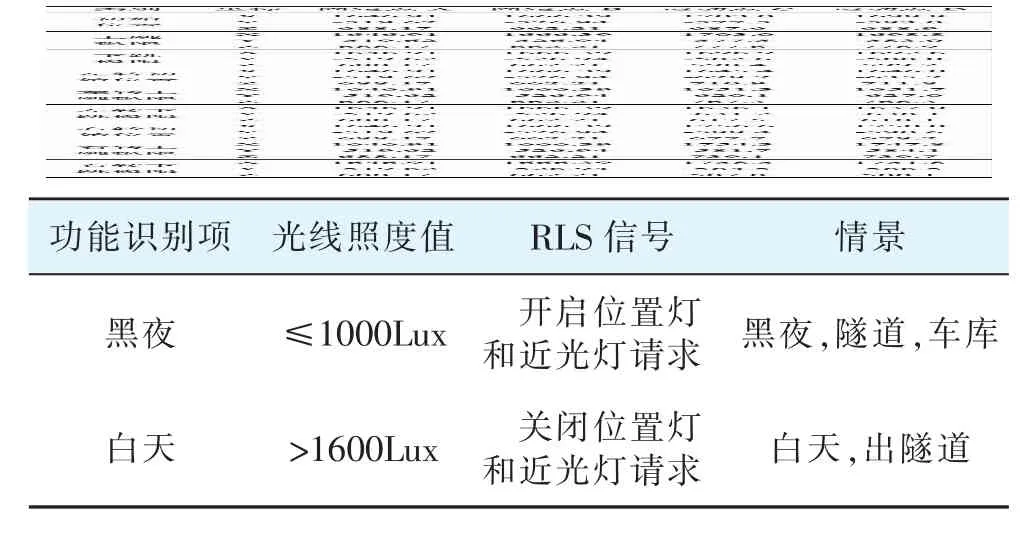
表1 场景识别
自动灯光请求功能控制策略: ①RLS光照模块能正确识别白天、 隧道、 车库和黑夜等几种情况; ②RLS光照模块感知到可见环境光亮度≤1000Lux时, 且延续时间大于1s时, 并且自动前照灯AUTO开关信号有效时, RLS通过LIN总线发送位置灯和近光灯开启指令信号, 请求车身控制器点亮近光灯和位置灯; ③RLS光照模块感知到可见环境光亮度>1600Lux时, 且延续时间大于5.5s时, 并且自动前照灯AUTO开关信号有效时, RLS通过LIN总线发送位置灯和近光灯关闭指令信号, 请求车身控制器关闭位置灯和近光灯。
3.1.2 自动雨刮请求功能原理
红外发光二极管 (LED) 发出红外线经过光学元件整理形成一定入射角度的平行光束, 红外线会在挡风玻璃内表面产生全反射, 反射的红外线经过另一端光学元件聚焦到红外光敏二极管 (PD) 上。 玻璃表面干燥的情况下, 默认为发射管发出的光线是平行入射到挡风玻璃上被最大化地反射回来, 通过光学元件汇聚后由PD接收。 当挡风玻璃外表面有雨滴时, 入射到挡风玻璃上的光线被部分散射掉,反射后PD接收的光线变少, 雨量越大则反射回来的光线越少。 通过与挡风玻璃干燥情况下接收的光线比较, 就可以得出目前挡风玻璃上水量的多少, 进而可以判断出不同的雨量模式。 自动雨刮请求功能系统框图见图3。

图3 自动雨刮请求框图
自动雨刮请求功能详述: RLS通过光学元器件来实现感知玻璃上的水汽, 当RLS自动雨刮请求功能激活后, RLS雨量模块通过光学元器件来识别小雨、 中雨、 大雨等不同的降水形式。 然后雨量传感器根据感知的水量, 通过LIN总线发送相应的刮水速度指令信号给车身控制器, 车身控制器根据刮水速度指令信号控制雨刮电机执行相应的动作,实现自动雨刮功能。
不同雨量对应的雨刮动作指令以及刮水速度指令信号的值如表2所示。

表2 刮水状态识别
1) 雨刮停止: 雨刮处于停止位置, 只要检测到雨量,无论小雨、 中雨、 大雨, 首先进入雨刮间歇点刮。
2) 雨刮点刮: RLS雨刮刮水速度指令间歇输出1。 如果在5s的间隔时间内, 只有小雨, 则维持在雨刮点刮中。当检测到中雨时, 开始计数间隔刮次数。 根据灵敏度的不同 (由低到高), 点刮3次后进入雨刮周期刮刷, 期间若检测到中雨则直接进入连续低速刮刷。
3) 雨刮周期刮刷: 间隔时间根据车速和灵敏度值 (默认值为3), 期间若检测到中雨则直接进入连续低速刮刷。
4) 雨刮低速连续刮: RLS雨刮连续输出1。 点刮模式遇到中雨进入低速连续刮。 周期刮模式遇到中雨进入到低速连续刮。 5s内检测到无中雨, 则退回至补刮。
5) 雨刮高速连续刮: RLS雨刮连续输出2。 低速连续刮模式遇到大雨, 进入高速连续刮模式。 5s内检测到无大雨, 则退回至雨刮低速连续刮。
3.2 自动前照灯和自动雨刮组合开关的开发
3.2.1 带AUTO挡的雨刮组合开关 (图4)

图4 带AUTO挡的雨刮组合开关
1) 开关置于OFF挡时, 雨刮系统关闭。
2) 当开关操作到 “AUTO” 时, 雨刮系统根据指令,自动执行低速、 间歇、 或高速雨刮控制; 当雨量光线传感器故障时, “AUTO” 挡可切换成 “INT” 挡功能执行。
3) 当开关操作到 “LO” 时, 雨刮低速控制。
4) 当开关操作到 “HI” 时, 雨刮高速控制。
3.2.2 带AUTO挡的灯光旋钮开关 (图5)

图5 带AUTO挡的灯光旋钮开关
1) 开关置于OFF挡时, 全部灯光熄灭。
2) 当开关操作到“AUTO” 时, 除远光灯、前雾灯和后雾灯, 近光灯和位置灯自动控制。
3) 当开关操作到“位置灯” 时, 位置灯亮起, 在该位置上可以操作前、 后雾灯, 将旋钮上拉4mm, 前雾灯亮起, 在这基础上再拉4mm, 前、 后雾灯同时亮起。
4) 当开关操作到 “近光灯” 时, 位置灯与近光灯同时亮起, 在该位置上可以操作前、 后雾灯, 将旋钮上拉4mm,前雾灯亮起, 在这基础上再拉4mm, 前、 后雾灯同时亮起。
3.3 车身控制器的功能开发
根据雨量光线传感器采集处理的数据, 车身控制器根据雨刮、 灯光指令进行自动雨刮、 自动灯光控制, 其应用层控制逻辑如下。
车身控制器应用层的自动雨刮控制模块 (图6) 用于接收来自雨刮组合开关的AUTO挡、 雨刮低速、 雨刮高速、 雨刮间歇时间调节和雨刮喷淋的开关信号, 控制雨刮系统自动和手动操作; 自动灯光控制模块 (图7) 用于接收来自灯光组合开关的AUTO挡、 位置灯、 近光灯、 远光灯和雾灯的开关信号, 控制灯光系统的位置灯和近光灯的自动和手动操作。
图6 自动雨刮控制模块

图7 自动灯光控制模块
1) 自动雨刮工作逻辑: 点火钥匙开关拨至ON挡, 雨刮组合开关拨至AUTO挡时, 当接收到雨量光线传感器发送的CAN信息刮水速度指令连续为1时, 则车身控制器控制雨刮系统低速连续刮水; 当接收到雨量光线传感器发送的CAN信息刮水速度指令为2时, 则车身控制器控制雨刮系统高速连续刮水; 当接收到雨量光线传感器发送的CAN信息刮水速度指令周期性为1时, 则车身控制器控制雨刮系统间歇刮水; 当刮水速度指令为0时, 雨刮刮水停止。 若在刮刷过程中, 雨量光线传感器发生故障时, 保持上一次刮水状态, 直至下一次上钥匙电复位。 同时, 仪表显示雨量光线传感器故障, 提醒用户切换到手动雨刮操作。
2) 自动灯光工作逻辑: 点火钥匙开关拨至ON挡, 灯光组合开关拨至AUTO挡时, 当接收到位置灯和近光灯工作指令均为01b时, 则车身控制器应立即驱动位置灯和近光灯工作。 若在工作过程中, 雨量光线传感器发生故障时,保持上一次灯光状态, 直至下一次上钥匙电复位。 同时,仪表显示雨量光线传感器故障, 提醒用户切换到手动灯光操作。
4 总结
在手动雨刮操作的基础上, 增加雨刮AUTO挡开关, 从而增加了自动雨刮系统控制, 可根据不同的场景, 选择控制方式, 自动雨刮控制系统可以减少驾驶行驶期间分心操作动作, 确保玻璃落雨刮除保持干净。 在手动组合开关的基础上, 增加灯光AUTO开关, 从而增加了自动灯光控制,根据光照度的环境场景变化, 实现了灯光的自动控制。 智能雨刮、 灯光控制系统给驾驶员带来了极大的驾驶舒适性,同时也提升了车辆驾驶的安全性。