
基于机器视觉的番茄横径测量技术研究
2022-02-13 11:48:51曾令培张廷婷庞智
机电信息 2022年3期
曾令培 张廷婷 庞智


摘要:为了实现番茄的智能包装,通过机器视觉获取番茄横径,分析横径数据,完成分类包装通道包装膜大小的设定。基于机器视觉的番茄横径测量过程包括图像采集、预处理、横径提取、数据分析。番茄图像采用图像采集系统获取;图像预处理通过灰度转换、去除椒盐噪声、边缘提取、阈值处理、二值化与形态学处理完成;横径提取选用最小外接矩形法和最小外接圆法获取番茄图像的最大横径长;横径数据分析获取不同包装通道包装膜大小设定值。试验结果表明,采用最小外接矩形法提取到的数据优于最小外接圆法;分类通道设置包装膜参数为68.00 mm、88.50 mm、102.00 mm,能完成不同尺寸大小的包装。基于机器视觉的番茄横径测量技术为分类包装提供了包装膜参数基础和依据。
关键词:机器视觉;番茄;横径;包装膜参数
中图分类号:TS206;TP391.41 文献标志码:A 文章编号:1671-0797(2022)03-0068-04
DOI:10.19514/j.cnki.cn32-1628/tm.2022.03.020
0 引言
包装在鲜果贮藏、运输、货架期都起到了重要作用,不仅能在很大程度上减少鲜果的染病腐烂,同时也是提高鲜果商品价值和扩大销量的重要技术措施之一[1]。番茄一直都是以原始状态上市,对于番茄的包装处理较少,鲜果番茄在各大商场基本都是采用浅托盘多个番茄保鲜膜包装,这种包装还停留在人工阶段,因此,番茄的智能自动化包装成为亟待解决的问题。
番茄横径是番茄尺寸大小的重要特征,通过番茄横径的获取可以精确地进行番茄自动化包装分级通道的分级,设定分类包装通道包装膜的大小。目前,对于传统的番茄测量方法有较多研究成果,但基于机器视觉进行番茄横径检测、设定智能分类包装膜尚未有人研究。鉴于此,本研究针对基于机器视觉的番茄横径测量选用最小外接矩形法与最小外接圆法进行对比,提取番茄横径尺寸,从而设定合适的番茄分类包装膜参数,实现番茄的智能包装。
1 番茄图像采集系统
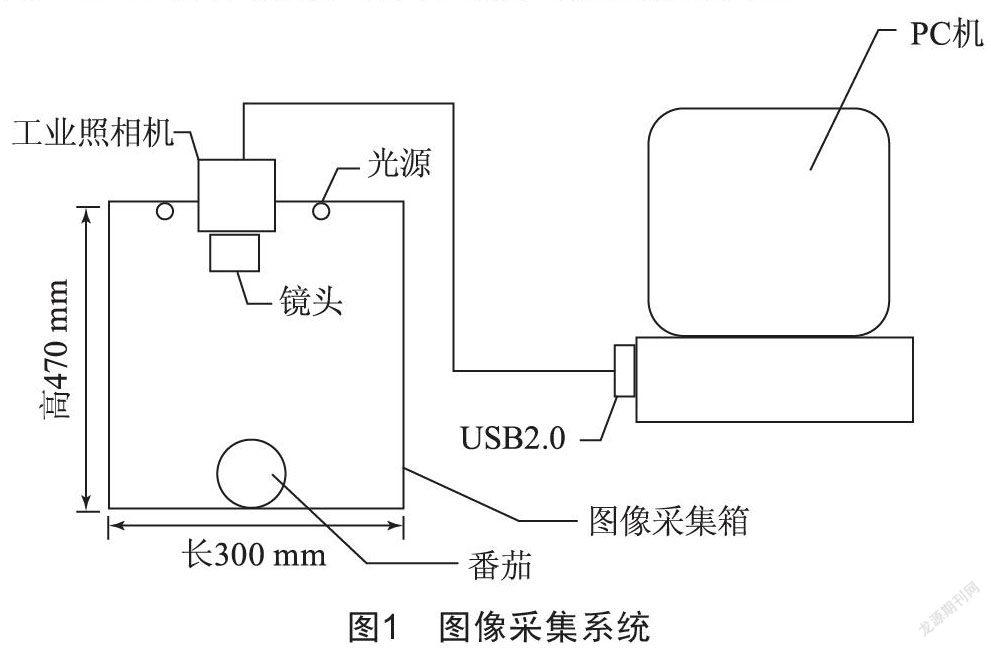
番茄图像采集系统主要由采集箱、工业照相机、镜头、光源、PC计算机组成,如图1所示。采集箱尺寸为300 mm×250 mm×470 mm,采集箱内壁涂上无反光黑漆。CMOS照相机选用Teledyne Lumenera Lw115,其分辨率为1 280×1 024,帧率为30 fps,光学格式为1/3″,镜头接口为cs,图像传感器为Sony IMX 035。镜头选用精工SSE0612N,其焦距为固定焦距6 mm,镜头到拍摄面的距离约为422.70 mm。照相机装置在拍摄箱顶部中间位置,环形LED灯围绕照相机。工作时相机通过USB2.0数字接口向PC提供实时拍摄的彩色图像,PC计算机采用Matlab软件获取图像,完成图像数据处理。
2 番茄图像预处理
番茄图像预处理主要完成图像获取、复原、增强、分割、分析工作。过程包括图像灰度化、中值滤波器去噪声、阈值分割、二值化与形态学处理,如图2所示。
2.1 图像灰度化
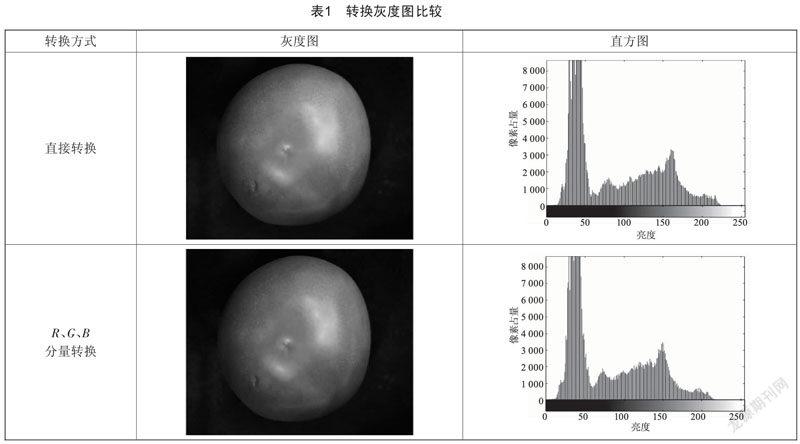
图像灰度化是将彩色图像转化为黑白图像处理,处理后的图像中只含亮度信息,不含彩色信息。Matlab通过USB3.0高速数字接口提取到的图像格式为“bmp”,针对图像格式选用了两种方法得到图像的灰度图。方法1,直接通过函数rgb2gray将彩色照片转换为灰度图像;方法2,提取图像中的R、G、B分量,三者分别表示图像中的红色、绿色、蓝色分量,通过公式V=1/3(R+G+B),转换得到灰度化图像,如表1所示。
如表1所示,两种方法得到的图像差异不大,其图像直方图形状、范围基本一致。直方图的差异在于第二次波峰处,直接转换方法下得到的直方图第二次波峰出现在亮度161处,亮度值位置的像素占量为3 279;R、G、B分量转换方法得到的直方图第二次波峰出现在亮度149处,亮度值位置的像素占量为3 475。同时,直接转换方法下得到的直方图截止范围出现在亮度223处,亮度值位置的像素占量为95;R、G、B分量转换方法下得到的直方图截止范围出现在亮度215处,亮度值位置的像素占量为57。
2.2 中值滤波器去噪声
一般情况下,图像采集及传输过程中不可避免地容易产生一些噪声,例如椒盐噪声。选用中值滤波器去除椒盐噪声,中值滤波选取大小为m×n窗口中被干扰的图像中值,利用中值公式很好地保留了图像的边缘,去除椒盐噪声效果也较好。
2.3 阈值分割
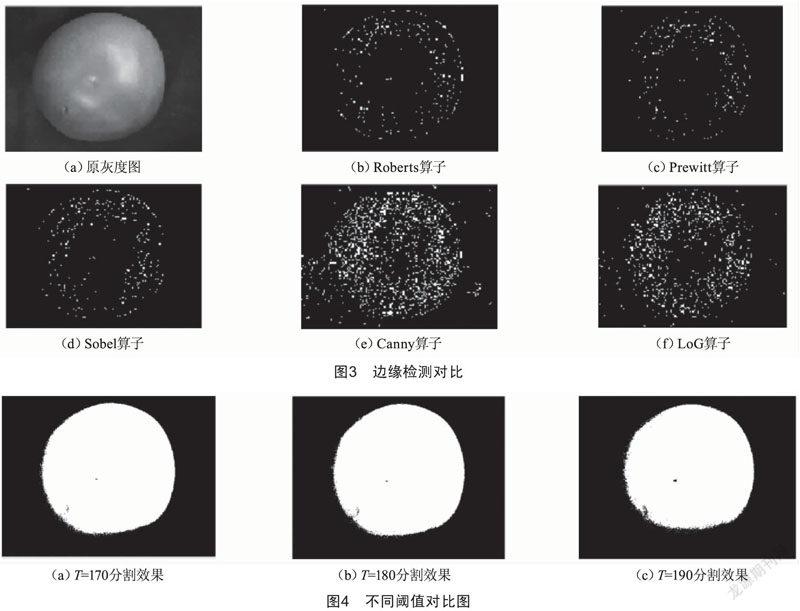
图像分割技术中边缘分割技术通过待测物与其背景的特征差异性实现边缘检测,常常使用微分算子(Roberts、Prewitt、Sobel)、Canny算子、LoG算子进行边缘检测,如图3所示。5种算法处理效果相近,基本都可以得到番茄的边界,但检测出来的边界较粗,需要做进一步的圖像处理。Roberts、Prewitt、Sobel算子处理后图像效果差距不大,Roberts算子得到的图像效果边缘最清晰,产生孤立的点最少。Canny和LoG算子处理后的图像,额外产生了许多孤立的点。本研究采用Roberts算子进行边缘分割。
工业测量中,当背景取与目标体对比较大的单一色时,采用阈值分割效果较好,故图像分割中采用阈值分割法[2]。通过原图直方图寻找合适的阈值,原图直方图中两个波峰相距较远,在色彩灰度范围170~200之间出现波谷,分别取T=170、T=180、T=190作为全局阈值比较。取T=170时,番茄的分割图像边界不够明显,图像左下角出现边缘范围较宽的毛刺,图像内部出现较少孤立点;取T=190时,番茄图像的边界变得清晰,图像左下角毛刺范围逐渐增大,毛刺点变多从而颜色变深,图像内部出现更多孤立点;取T=180时,阈值分割效果最好。不同阈值对比图如图4所示。
2.4 二值化与形态学处理
在图4中可以看到T=180时的阈值分割效果,图像边缘不够清晰,图像左下角出现毛刺,图像内部出现孤立点。为了消除阈值分割图像中产生的毛刺和孤立点,采用二值图与形态学结合处理。数学形态学中的腐蚀、膨胀、开闭运算,在图像处理过程中各具特点。Matlab可以对图形进行算数、关系、逻辑运算,也可以运用形态学完成膨胀和腐蚀运算。数学形态学中的膨胀运算能扩大图像边界区域,填充图像边缘的毛刺和图像内部小孔;腐蚀运算能缩小图像区域边界,消除图像边缘处的噪声区域[3]。
3 番茄图像横径提取
经过以上处理后的图像,番茄果实部分呈白色,背景部分为黑色。对番茄图像的横径检测提取用到了两种不同的方法:最小外接矩形法和最小外接圆法。
3.1 最小外接矩形法提取番茄图像横径
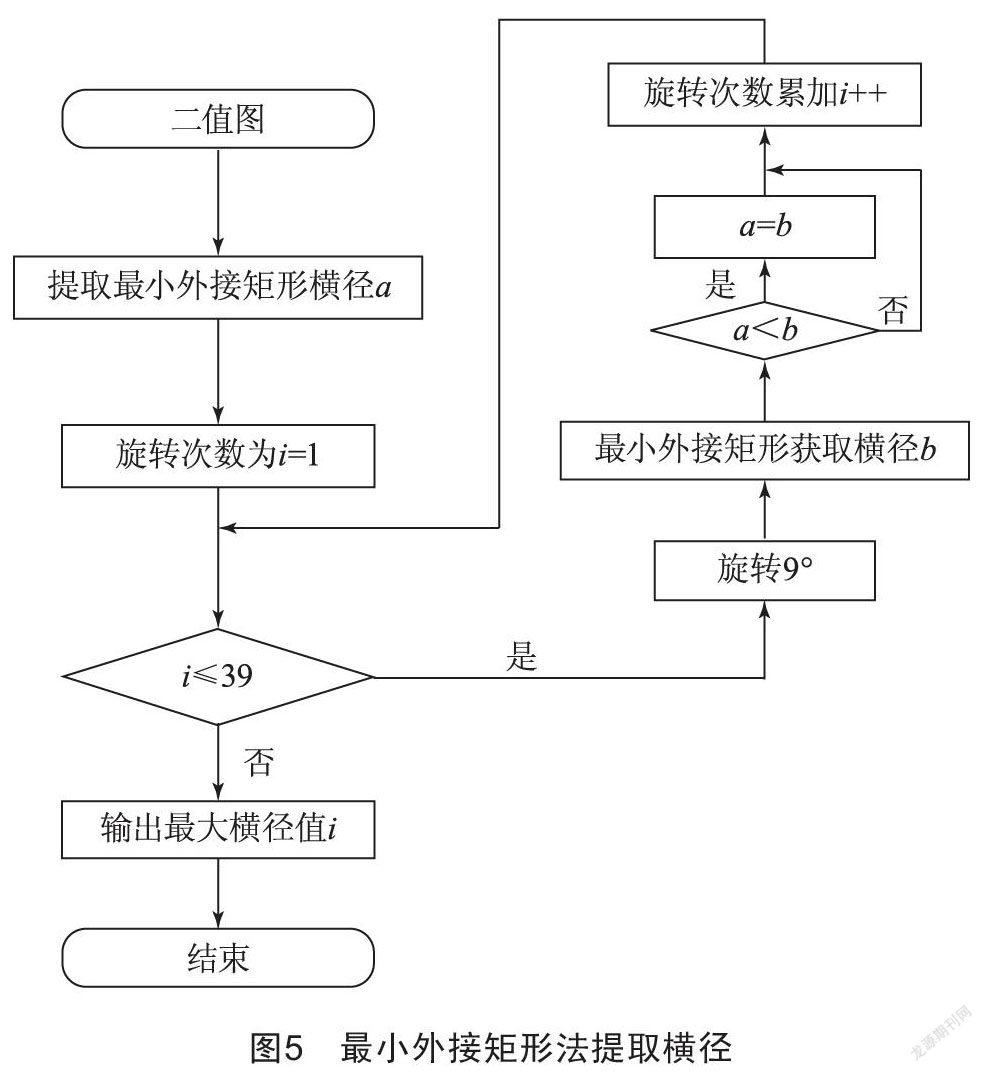
为了确定果实的外形大小,番茄图像采用最小外接矩形法提取,流程图如图5所示。
番茄二值图像中已经将白色、黑色区域分离,通过对行列像素不为1的点进行判断,取得图像边缘横坐标和纵坐标,完成最大坐标与最小坐标的横坐标、纵坐标的确定与计算。在Matlab中可以运用rectangle、boundingbox操作指令得到番茄的最小外接矩形,并返回其横径值。以上是单个番茄单次外接矩形的方法,对图像进行每次9°的图像旋转,旋转40次完成番茄图像的全部旋转;每完成一次旋转均计算番茄图像的最小外接矩形,得到40个外接矩形的40个横径值,比较出最大的横径值,即番茄外接矩形的最大横径。
3.2 最小外接圆法提取番茄图像横径
番茄是一种不规则的图形,其形状可以近似为圆形,选用最小外接圆法提取番茄图像横径,流程图如图6所示。
基于完成了二值化处理的图像,获取番茄图像最小外接圆,返回其半径,将半径转换成直径,即可得到番茄的最大横径长度。算法需判断番茄二值图中的连通区域,对图像每一个连通区域求质心,将质心作为最小外接圆的圆心,遍历各个像素点,计算像素点是否在番茄图像的半径内,如果不在半径内,则以当前像素点到质心的距离作为新的半径,从而类似迭代更新得到最小外接圆半径。
4 数据结果与分析
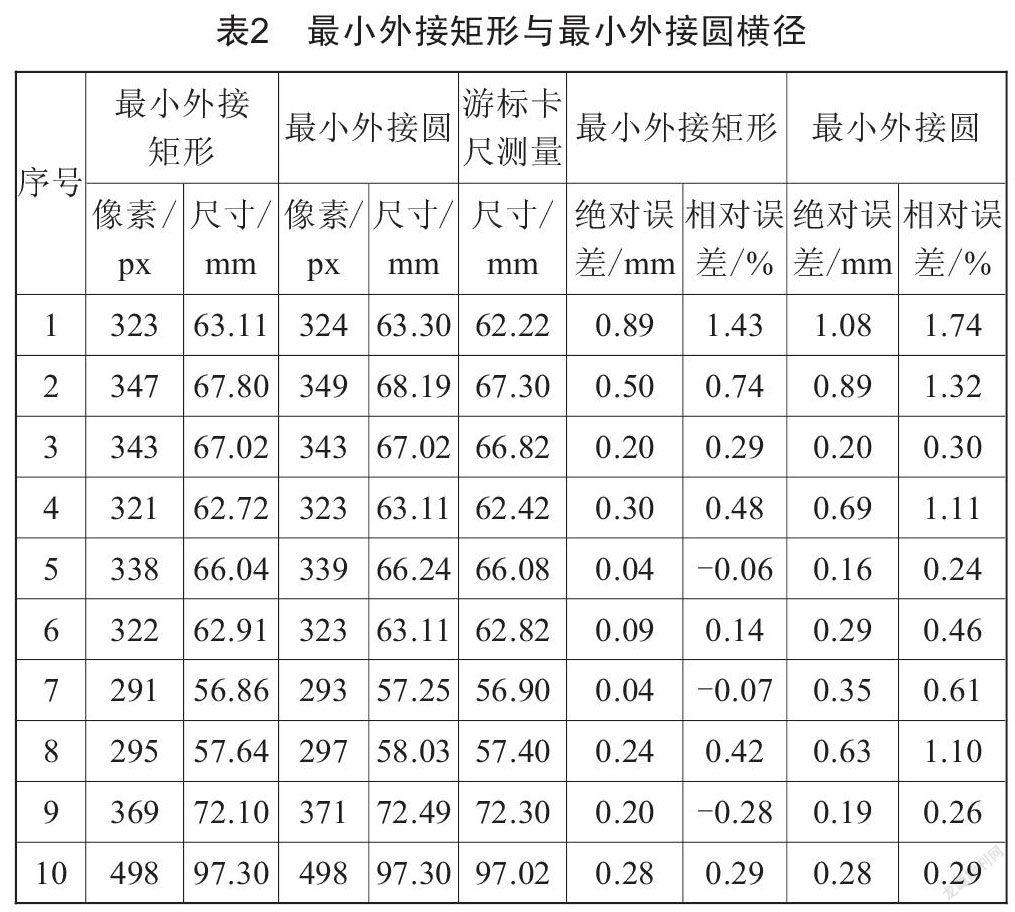
对不同时间段的三批次番茄进行抽样,抽出200个番茄。用最小单位为克、保留到小数点后两位精度的电子秤记录下番茄重量;用游标卡尺测量每一个番茄的最大横径4次,取平均值记录下最大横径值。同时,记录下视觉系统下采用最小外接矩形法和最小外接圆法处理的番茄的横径长度,对比游标卡尺获得的数据。现从200组番茄数据中随机抽取10组数据举例,最小外接矩形与最小外接圆横径如表2所示。
经过试验数据分析可知,最小外接矩形法测得的值跟游标卡尺测量的值较为接近,由于在测量时像素取的是整数部分,因而数据不够精确。分析最小外接圆法绝对误差、相对误差数据,测得的所有横径长度都比实际测得的横径长度要大。
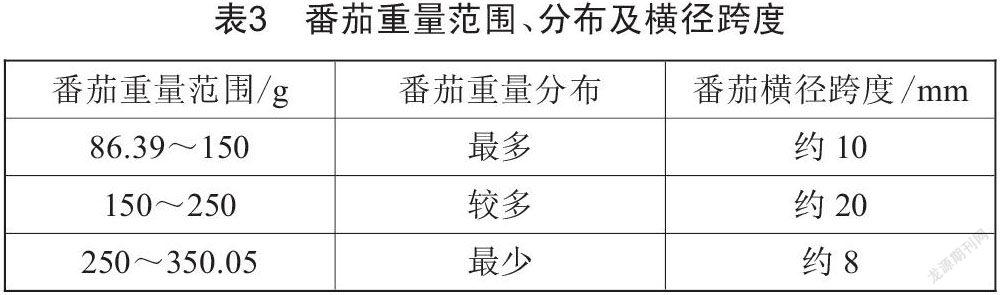
200组番茄中,番茄的重量情况为:100 g以下有24个,100~150 g有99个,150~200 g有34个,200~250 g有22个,250 g以上有21个。其中番茄重量最小为86.39 g,最大为350.05 g。游标卡尺测量的横径长度,最小番茄与最大番茄之间横径相差接近40 mm。在200组数据中,出现多组重量148.20 g与148.60 g的番茄,尺寸分别为72.30 mm与66.46 mm,番茄重量与尺寸大小不一定成正比。番茄重量范围、分布及横径跨度如表3所示。
根据以上数据,番茄包装过程中可以设定包装膜的长度,选择设置参数分别为68.00 mm、88.50 mm、102.00 mm。
5 结论
(1)通过图像采集系统获取番茄图像,经过灰度化、去除噪声、边缘分割、阈值分割、二值化与形态学处理后,直接运用形态学中腐蚀、膨胀处理的图像与运用形态学简单运算后再完成腐蚀、膨胀处理的图像相比,后者的处理效果远远好于前者。
(2)利用最小外接矩形法和最小外接圆法进一步提取番茄的尺寸,根据测量数据,最小外接矩形法所测数据跟游标卡尺直接所测数据更为接近。
(3)番茄在包装中可以通过对其横径大小的检测,分级进入番茄包装通道,通道中包装膜分别设定为68.00 mm、88.50 mm、102.00 mm,可以完成不同尺寸大小的包装。
基于机器视觉的番茄横径检测方法,可实现对番茄横径的获取,并通过横径分级使番茄进入不同包装膜通道,为智能包装的实现提供新的分级依据。当番茄传送过快时,应用本文方法提取横径的速度还需要提高,在今后的研究中,可以進一步将深度学习和神经网络算法与传送速度相结合,以提高番茄横径获取速度,改善当前研究中的不足。
[参考文献]
[1] 李莉,刘超超,李蕾,等.我国水果包装现状及问题启示[J].保鲜与加工,2016,16(2):105-107.
[2] 邓海霞.基于机器视觉的群体禽蛋大小检测方法研究[D].武汉:华中农业大学,2006.
[3] 徐冬.基于卷积神经网络的大豆病害识别研究[D].合肥:安徽大学,2018.
收稿日期:2021-12-02
作者简介:曾令培(1981—),男,四川资阳人,硕士,讲师,工程师,研究方向:自动化控制。
通信作者:张廷婷(1985—),女,四川隆昌人,硕士,工程师,研究方向:农业工程与信息技术。
猜你喜欢
中国防痨杂志(2022年6期)2022-11-25 00:36:00
小猕猴学习画刊(2022年12期)2022-02-06 03:00:52
今日农业(2021年21期)2022-01-12 06:31:52
今日农业(2020年23期)2020-12-15 03:48:26
江苏农业科学(2019年14期)2019-09-23 06:10:53
江苏农业科学(2017年7期)2017-05-23 23:49:32
科教导刊(2016年25期)2016-11-15 17:53:37
软件工程(2016年8期)2016-10-25 15:55:22
科技视界(2016年20期)2016-09-29 11:11:40
企业导报(2016年10期)2016-06-04 11:37:43
