煤矿井下掘进设备智能防撞及人员安全预警系统
2022-02-12 11:43赵振华
山西焦煤科技 2022年12期
赵振华
(山西焦煤 机械电气有限公司, 山西 太原 030024)
煤矿井下掘进工作面设备较多,设备之间交替作业,往来穿梭,且掘进设备体积较大,司机视觉盲区也大,司机无法直接观察到盲区内的设备与人员,在设备行进过程中容易发生碰撞、碾压等事故。因此,研制人员安全防碰撞系统尤为重要。随着智慧矿山技术的不断发展,井下掘进设备具备智能防碰撞功能成为必然要求,本文提出了一套基于毫米波雷达前防撞原理以及热成像原理的掘进设备智能防撞及人员安全预警系统,主要实现设备主动避害、人员闯入报警以及监测预警等功能,具有双向防护、高清成像以及速度补偿等特点。
1 智能防撞及人员安全预警系统技术原理
1.1 毫米波雷达前防碰撞技术
毫米波雷达防碰撞主要采用线性调频测距和相位法测角度原理。线性调频测距主要是通过电磁波从雷达系统到目标间往返传播的时间内,发射信号的频率已发生变化,根据两者的差频可以实现目标测距调制雷达发射信号,通过测量差拍频率测量距离,即差拍-傅立叶体制原理,利用测定频率按频率调制信号规律变化的发射信号和回波信号之间的频率差来确定目标的距离速度信息[1].
相位法测角度用于对前方障碍物角度检测,利用多个天线所接收回波信号之间的相位差进行测角。设在θ方向有一远区目标, 则到达接收点的目标所反射的电波近似为平面波。由于两天线间距为d, 故它们所收到的信号由于存在波程差ΔR而产生一相位差φ.
式中,λ为雷达波长,用相位计进行比相, 测出其相位差φ, 就可以确定目标方向θ.
1.2 热红外高清成像技术
红外热成像技术运用的是斯特藩定律,即当在特定温度下,由于物体材料、表面特性存在细微差别,导致物体辐射系数差异,进而导致被测物体与背景的辐射度存在差异,通过信号处理把差异放大,在特定显示器中显示,就能得到被测物体的红外热成像图。其原理为当目标温度高于绝对零度,自发的向外辐射能量,这种能量以红外线的形式表现出来,通过光学系统对目标物体的红外辐射进行汇聚成像,经红外探测器将目标物体的红外辐射转换成电子信号,再将电子信号通过电子信息处理,最终显示出红外热图[2-3],热成像流程示意图见图1.

图1 热成像流程示意图
2 智能防撞系统技术路线及方案设计
本文研究的掘进设备智能防撞及人员安全预警系统主要包括毫米波雷达传感器装置、高清热成像仪、声光报警器以及集成式控制显示装置等。
2.1 毫米波雷达系统设计
雷达传感器装置采用矩阵式天线,通过ECU处理单元对雷达高频信号采样,并由自适应滤波器去除杂波干扰信号;使用嵌入式开发技术,采用CAN总线控制自动识别、校准雷达信号以及控制信号方法,雷达信号采集单元和ECU信号处理单元提取前方障碍物的相对速度、相对距离及相对角度信息,并将这些信息发送给信号控制单元,通过信号控制管理平台对发送来的信息进行计算,实现人员及设备精准测距功能[4]. 毫米波雷达前防撞系统技术路线图见图2.
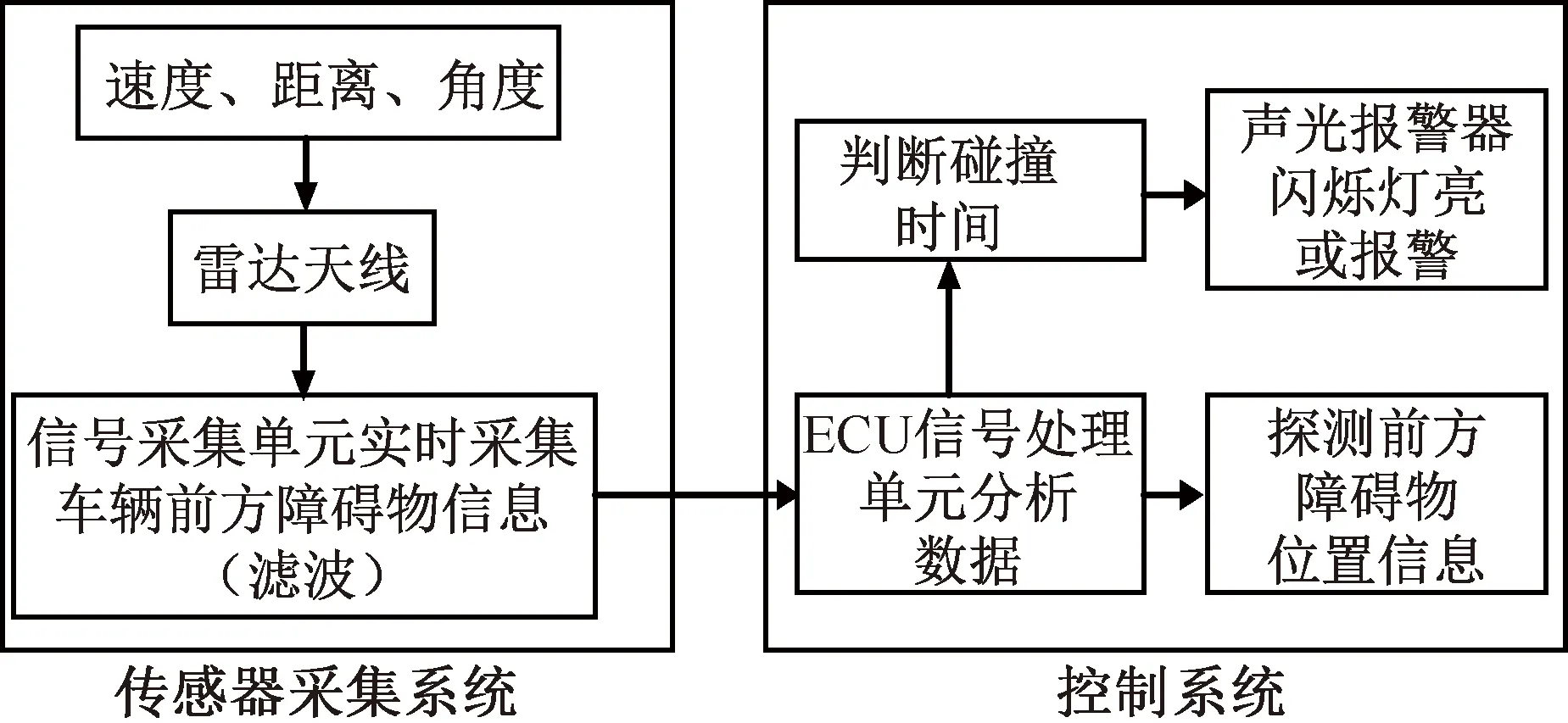
图2 毫米波雷达前防撞系统技术路线图
2.1.1 通讯电路设计
毫米波雷达主控制电路包括微计算机控制电路、雷达信号调试电路及信号校准电路、输入按钮电路、输出速度脉冲电路、CAN总线控制电路、ECU信号处理电路、485输出功能电路、稳压电路以及功率电路等,主要功能见表1.
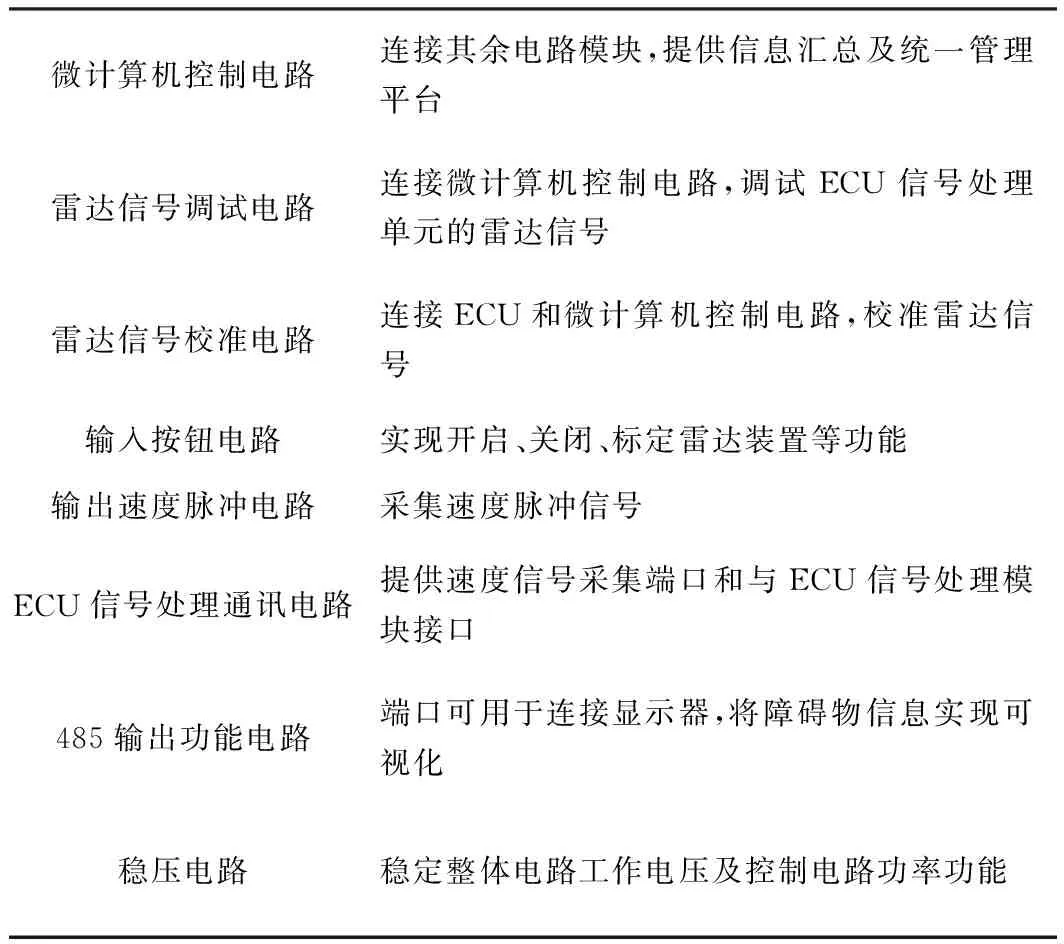
表1 电路主要功能表
2.1.2 制动技术设计
掘进设备增加电磁制动阀块,实现在碰撞前设备自动制动措施。毫米波雷达系统制动控制流程图见图3. 系统通过单片机控制雷达信号通讯以及电磁阀的通断,通过判断碰撞时间采取报警或紧急制动。该系统设定碰撞时间的临界值为2 s,雷达信号采集单元获取设备运行信息,包括行驶速度v0、障碍物速度v1、相对距离R及相对角度θ.

图3 毫米波雷达系统制动控制流程图
当v0>v1时,设备与前方障碍物发生碰撞时间t>2 s,蜂鸣器闪烁灯亮。
碰撞时间t≤2 s,制动安全距离Sbr 其中,λ为雷达波长,ΔR为波程差。 根据实际需求设置圆形报警范围,主要分为报警区和停机区,对应不同报警范围会有相应的声光报警信号与开关量信号输出,通过开关量信号控制设备停机等操作[5].掘进设备报警区域示意图见图4. 如图4所示,当人员进入设备报警区域时,声光报警器黄灯闪烁,发出“人员靠近请注意”的报警声,设备执行相应的避险动作;当人员进入设备停机区域时,声光报警器红灯闪烁,发出“人员危险请停机”的报警声,设备停机避险。掘进机司机在掘进机的报警区与停机区内属于免报警,但是掘进机司机进入其他设备的报警区域停机区时会正常报警。当两台设备相互靠近,其中一台设备进入另一台设备的报警区或停机区时,声光报警器发出相应的报警信号,并执行相应的避险动作,避免两台设备发生碰撞。 图4 掘进设备报警区域示意图 同时,为有效防止毫米波雷达探测系统发生误报的情况,掘进设备前段增加视频采集装置,掘进设备运行发生报警时,驾驶员可根据视频画面判断前方是否有人员来执行操作,防止误报警时影响设备正常运行。热成像系统安装示意图见图5,设备前端人员画面显示见图6. 热成像视频监控画面见图7. 图5 热成像系统安装示意图 图6 设备前端人员画面 图7 热成像视频监控画面 控制显示装置集成雷达采集到的人员信息以及热成像仪采集到的视频信息,通过LabView建立通讯模型,使用嵌入式开发技术,并通过协议控制将采集到信号实现数模转换,由自适应滤波排除干扰信号,实现设备附近3 m内的障碍物精确定位[6]. 为验证掘进设备智能防撞及人员安全预警系统的可靠性,分别对毫米波雷达装置和热成像仪进行试验分析,主要通过基线测长系统设备,准确精度为U=(0.5+0.5L) um、k=2,测试环境温度为20 ℃,固定雷达装置,移动金属小车平移,人员横穿探测范围,记录信号并观测报警情况,测试结果见表2. 表2 测试结果表 根据上述实验数据可知,该系统可实现3 m内有效探测,系统成像清晰,比目前多数安全防撞探测装置精度高,2 m范围内可实现报警,进一步提高系统的安全性。 本文研制的煤矿井下掘进设备智能防撞及人员安全预警系统,属煤矿井下提高掘进设备安全及工作面人员安全的技术领域。它是针对煤矿井下掘进工作面设备较多、可见度低等情况,设计的一种高精人员定位及视频监控系统,集成了毫米波雷达探测技术和热成像技术的优点,实现了掘进设备前方人员定位以及侧后方人员设备的视频实时监控,大幅度地提高了人员、设备的安全性。同时,该技术也是煤矿实现智能化采掘、智能控制等的关键技术,是实现煤矿生产中“机械化换人、自动化减人”目标的关键技术手段。2.2 热成像系统设计




2.3 控制及显示系统设计
3 智能防撞系统试验分析

4 结 语
猜你喜欢
消费电子(2022年7期)2022-10-31
中国交通信息化(2022年3期)2022-06-01
现代仪器与医疗(2021年4期)2021-11-05
通信电源技术(2020年11期)2020-09-07
小哥白尼(趣味科学)(2018年12期)2018-12-18
汽车工程师(2018年1期)2018-07-13
电子技术与软件工程(2016年23期)2017-03-06
中国公路(2017年13期)2017-02-06
汽车维护与修理(2016年3期)2016-02-28
民用飞机设计与研究(2015年3期)2015-12-07