基于空谱注意力机制及预激活残差网络的高光谱图像分类算法
2022-02-10 12:06:34袁芊芊谢维信
信号处理 2022年12期
袁芊芊 谢维信
(1.深圳大学ATR国防科技重点实验室,广东深圳 518060;2.广东省智能信息处理重点实验室,广东深圳 518060)
1 引言
高光谱图像中包含了丰富的光谱和空间信息,在对地观测研究领域起着重要作用,在军事及民用领域也都有着重要的应用。高光谱图像数据具有波段多、波段宽度窄、光谱分辨率高的特点,但同时也有着特征维度高的缺点。由于其具有的高维特性,容易导致分类器的性能下降,这种现象称为“休斯(Hughes)”效应。此外,由于高光谱图像数据的密集光谱采样,高光谱波段中的相关光谱信息通常是高度相关的,高度冗余的信息也会影响高光谱图像分类的性能。
为了获得好的分类效果,提取的特征应该具有表示性强、判别性好的特点,特征工程对高光谱图像分类起着关键的作用。传统的高光谱图像分类使用基于手工特征的机器学习技术[1-2]。近年来,深度学习逐渐兴起,各种各样的深度学习模型得以开发[3]。随着深度学习技术的发展,基于深度学习的高光谱图像分类在方法和性能上取得了显著进展。
当前深度学习领域中最广泛应用的高光谱图像数据分类工具是卷积神经网络(Convolutional Neural Network,CNN)模型。它在处理图像分类问题方面的优越性,体现在其可从原始图像中学习、提取和表示隐藏的、复杂的和非线性的特征的能力[4]。在过去几年里,研究人员提出了许多可从高光谱图像数据中捕获复杂特征的深度学习算法,以深入理解和利用丰富的空谱特征[5]。其中三维卷积神经网络(3D-CNN)可以同时提取光谱信息和空间信息,这种光谱空间融合模型考虑了来自高光谱图像数据立方体的光谱特性和空间信息,基于此可以发展出多种多样的策略和架构来进行光谱空间信息的处理[6-7]。
He 等人[8]提出的残差网络(Residual Network,ResNet)是深度学习中应用最广泛的骨干网络架构之一,并且在高光谱图像分类任务中也得到了应用。ResNet 已被证明在处理空间光谱数据中的冗余信息方面是有效的[9]。光谱和空间残差块可以有区别地学习和提取高光谱图像中丰富的光谱空间信息,其中残差块通过恒等映射连接三维卷积层,以促进梯度更好地反向传播[10-11]。残差网络已逐渐成为许多高光谱图像分类算法的主要特征提取架构[12-13]。例如,Wang等人[14]提出了一种高光谱多尺度ResNet,通过更好地利用不同尺度的可用信息来改进简单的残差模型。此外,孟月[15]提出了一种3D-ResNet 分类模型,可以更充分地提取高光谱图像中的空谱特征,从而进一步提高分类精度,但在数据输入分类模型前需要借助虚拟样本来增加训练样本的数量。Wang 等人[16]提出了一种深度可分离的全卷积残差网络,其中残差学习和深度可分离卷积可以缓解梯度消失和过拟合的问题,但配合使用的区域增长方法需要额外的计算成本,因此需要花费大量时间,且在同一类像素相隔很远的情况下性能欠佳。Mei等人[17]提出了一种级联残差胶囊网络(Cascade Residual Capsule Network,CRCN),残差模块用于学习光谱维度中的高级光谱特征和处理空间相邻类别的高光谱图像立方体之间的光谱相似性,但CRCN的架构相当复杂,有待继续改进。总的来说,在高光谱图像的处理方面,目前的一些残差网络及其变体或改进,在网络结构方面还需要进一步发展,如何在性能改善的同时不增加模型复杂度也是值得进一步研究的问题。
新的CNN 架构设计是比较困难的,因此Hu 等人转而关注通道关系,提出了可在原有的基础CNN架构上集成的即插即用的“挤压和激发”(Squeezeand-Excitation,SE)块[18],显式地将通道注意力机制集成到骨干网络(backbone)中,以辅助获取特征之间的通道相关性,提升骨干网络的性能。Hu等人还把通道注意力模块实例化地集成到VGG、Inception和ResNet 等骨干网络中,并在二维图像分类任务中取得了一定的效果。高光谱图像数据中包含了高度冗余的信息,这会影响高光谱图像分类的效果。因此,注意力机制有助于模型选择性地关注具有判别性的信息并忽略冗余信息[19-20]。高光谱图像立方体中不同的光谱带和空间位置具有不同的判别能力,如果充分探索,这些先验信息将有助于提高CNN的学习能力。沿着这个方向,Hang等人[21]提出了一种用于高光谱图像光谱空间分类的注意力辅助CNN 模型,在每个卷积层中都加入了注意力模块,使CNN 专注于更具辨别力的通道和空间位置,同时抑制了不必要的通道和空间位置,但也相应增大了模型的复杂度。而杨晴[22]将注意力模块集成到常用于语义分割任务的经典骨干网络U-Net 上,提出了一种空间注意力网络来学习高光谱图像高频区域的信息,但模型的泛化性有待提高。Qu 等人[23]提出了三重注意力并行网络,且应用了一种三重注意机制过滤每个子网络的特征图,以获得更多的空谱信息和更重要的特征通道,但捕获的特征在类不平衡的情况下鲁棒性不足。Zhai 等人[24]提出了基于双重注意力的多级一维卷积神经网络,分层挖掘局部通道相关性,利用轻量级的子空间注意模块来学习互补的跨通道依赖关系,然而提取的特征的判别性还可以进一步增强。总的来说,在高光谱图像的处理方面,目前用于辅助骨干网络的注意力机制还存在不足,其辅助捕获的特征的判别性和鲁棒性还有待提高。
针对上述问题,为了获取表示性高、判别性好的特征,提高分类模型的性能,本文提出了一种基于空谱注意力机制及预激活残差网络的高光谱图像分类算法。该方法是一种基于光谱空间的深度卷积神经网络改进的特征学习方法。首先,设计了基于空谱注意力机制的空谱特征提取模块,以利用注意力机制引导特征提取,更有效地利用高光谱图像的光谱和空间信息对特征进行重校准,为空谱特征在后续联合学习时能专注于更具辨别力的通道和空间位置提供保证。其次,设计了基于预激活残差网络的空谱特征联合学习模块,其中预激活残差网络改进了原始残差构建块的网络结构,从而能在空谱特征联合学习时获得表示性更强的深层特征。实验结果表明,提出的算法在Indian Pines、Kennedy Space Center 以及 University of Pavia 等不同的数据集上都能获得更好的分类性能,表明该算法在获得判别性更强的光谱空间特征表示方面的有效性和鲁棒性。
2 方法介绍
2.1 基本框架
本文所提出的基于空谱注意力机制及预激活残差网络的高光谱图像分类的框架如图1所示。该框架中,高光谱图像的空间邻域块X∈RH×W×C是网络的输入。首先,利用基于空谱注意力机制的空谱特征提取模块,从X中提取重校准的空谱特征;其次,利用基于预激活残差网络的空谱特征联合学习模块,进行重校准的空谱特征的联合学习,获得鉴别性更强的深层空谱特征表示;最后,对获得的深层空谱特征表示进行平均池化处理,并通过全连接层以获得最终的分类图。

图1 基于空谱注意力机制及预激活残差网络的高光谱图像分类框架Fig.1 Hyperspectral image classification framework based on spatial-spectral attention mechanism and pre-activation residual network
2.2 基于空谱注意力机制的空谱特征提取模块
使用注意力机制的各种模块,由于其架构精简,效果良好,且属于即插即用的模块,便于集成到骨干网络中,在卷积神经网络得到了广泛应用。其中SE 块[18]以通道域为注意力域,旨在学习一个权重,以表示层或通道内激活的相对重要性,但忽略了空间信息。而卷积块注意模块(Convolutional block attention module,CBAM)[25]与SE 相比,同时关注了空间域和通道域这两个注意力域,在全局平均池化的基础上多了一个全局最大池化,在空间注意力部分,将两个池化相加激活后再对原特征进行加权,然而,使用最大池化会导致在保留局部信息方面的效果较差。而Roy等人[26]提出的通道挤压和空间激励块(Channel Squeeze and Spatial Excitation Block,sSE )则是通过卷积生成投影张量,作为对于空间位置的所有通道的线性组合表示,然后把投影通过激活再用于加权原特征,能更好地保留相关局部信息。本文借鉴SE 块和sSE 块,针对高光谱图像数据,设计了基于空谱注意力机制的空谱特征提取模块。其中,注意力机制分为光谱注意力以及空间注意力两个部分,用于三维卷积神经网络,分别从光谱和空间维度两个方面提供注意力特征图。该机制可以有效地帮助网络抑制相关性不强的特征,关注重要特征,从而增强网络对特征的表征能力,提高网络的分类性能。
本文设计的基于空谱注意力机制的空谱特征提取模块如图2所示。把从原始高光谱图像中选取的三维图像邻域块X作为模块的输入,对X使用卷积核大小为1 × 1 × 7、输出通道数为C'的三维卷积,得到光谱特征,对X使用卷积核大小为3 ×3 × 1、输出通道数为C''的三维卷积,得到空间特征,两个特征的定义如下:
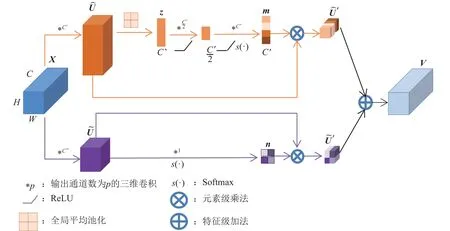
图2 基于空谱注意力机制的空谱特征提取模块示意图Fig.2 The structure of spatial-spectral feature extraction module based on spatial spectrum attention mechanism

其中,*表示三维卷积操作,W和b分别表示卷积层的权重和偏置,Fspectral变换用于提取光谱特征,Fspatial变换用于提取空间特征。在卷积过程中,为了实现维度匹配,使用了零填充方式进行边界填充,这有利于提取图像边缘部分的特征,防止信息丢失。
对于光谱特征,为了学习紧凑的特征表示和在特征图中捕获光谱通道间的相互依赖关系,首先利用全局平均池化操作来计算关于光谱特征的通道级的描述子Z∈Rc×1:

其中,Zc'表示Z的第c'个元素,H表示光谱特征的底部矩形的高度,W表示光谱特征的底部矩形的宽度,ui,j∈。
然后,为了更好地对光谱信息的相关性进行拟合,描述子Z经过一个全连接层(使用三维卷积实现),同时使用ReLU 函数激活,将Z的特征维度由C'降低为C'/2。维数的压缩同时减少了参数的开销,也更有利于模型的收敛。
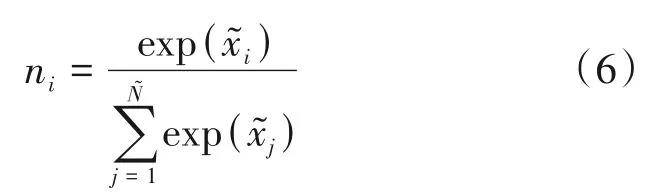
之后再经过一个全连接层进行升维,恢复到之前的维度C'。同样地,再次经过ReLU 函数激活后,得到的特征记为x',输入Softmax 函数计算权重分布。Softmax函数公式[27]如下:

其中,x'表示输入的特征向量,N表示输入的特征向量的维数。Softmax 函数把输入的N维特征向量中的每个元素进行指数变换,得到N个大于0的数值,再除以它们的和,得到N个概率值作为权重。
应用Softmax 函数可计算关于光谱通道的一个权重分布,得到光谱注意力向量m,公式如下:

其中,mi是光谱注意力向量m的第i个元素,表示输入的特征向量的维数。
最后,将光谱注意力向量m通过元素级乘法加权到光谱特征上,得到光谱注意力加权后的重校准特征,公式如下:

对于空间特征,利用三维卷积操作对其光谱通道维进行压缩,得到一个空间信息的紧凑特征表示,记为然后,把紧凑特征表示输入Softmax 函数,计算空间权重分布,得到空间注意力向量n,公式如下:
其中,ni是光谱注意力向量n的第i个元素,表示输入的特征向量的维数。
最后,空间注意力向量n通过元素级乘法加权到空间特征上,得到空间注意力加权后的重校准特征,公式如下:

得到重校准特征和重校准特征后,对它们使用特征级加法进行拼接,从而得到最终的基于空谱注意力机制进行重校准的空谱特征V,公式如下:

利用空谱注意力机制对特征进行重校准,能够获取高光谱图像光谱信息的全局与局部相关性,以及空间信息的上下文相关性,有助于在后续联合学习时选择性地关注更具判别性的信息并忽略高光谱图像数据包含的冗余信息,从而提高网络产生的特征表示的质量,提高网络的分类性能。
2.3 基于预激活残差网络的空谱特征联合学习模块
在众多深度学习模型当中,ResNet 及其变体[8,28-31]是深受关注的卷积神经网络,通过跳跃连接可以很好地处理消失梯度问题。为了在网络中前后传播信息,原始的ResNet 通过将残差块深度叠加在一起而形成。原始的基本残差块(basic block)的网络结构如图3所示。

图3 原始的基本残差块示意图Fig.3 The structure of the original basic residual block
在原始的基本残差块的网络结构中,信号进入分支前没有经过标准化处理,在网络训练过程中,其分布会逐渐发生偏移或者变动,这造成了学习困难;而信息传播的最直接的路径(由图3中大的橙色箭头表示)上也没有应用正则化,容易产生过拟合现象,限制了模型的学习能力。而Duta等人[31]提出了I-ResNet,这是ResNet 的改进版本,对ResNet 的网络层的信息流、残差构建块结构和投影快捷方式作出了改进,并在二维图像分类任务中取得了效果。本文在I-ResNet中改进残差构建块结构的基础上,针对高光谱图像数据,设计了基于预激活残差网络的空谱特征联合学习模块,通过进一步改进预激活残差网络中的残差构建块网络结构来促进特征学习,从而获得了更具鉴别性的深层光谱空间特征表示。
模块的结构如图4所示。模块的输入为基于空谱注意力机制重校准的空谱特征V。该模块由预激活的光谱特征学习残差块(a)、refactor 层和预激活的空间特征学习残差块(b)先后级联构成。两个残差块具有相似的结构,均由若干个BN 层、ReLu 层、Conv3D 层构成,其不同之处在于三维卷积核的大小,残差块(a)中卷积核大小为(1,1,7),残差块(b)中卷积核大小为(3,3,1)。与原始的基本残差块(图3)相比,预激活的残差块主要有以下三点不同。其一,在第一个卷积层前加入了BN 层和ReLu层作为预激活单元,通过预激活单元对输入分支的信号做标准化处理,把输入值的分布恢复为更稳定的分布,这种稳定的信号作为输入使得模型更易于优化。其二,针对高光谱图像数据的特性将卷积层由二维卷积改为三维卷积,便于光谱特征和空间特征的联合学习。其三,将分支的最后一个BN 层移动到应用加法操作进行信号合并之后,使得全信号经过正则化后再通过ReLU 层进行激活,避免产生过拟合现象,提升了模型的特征学习能力。
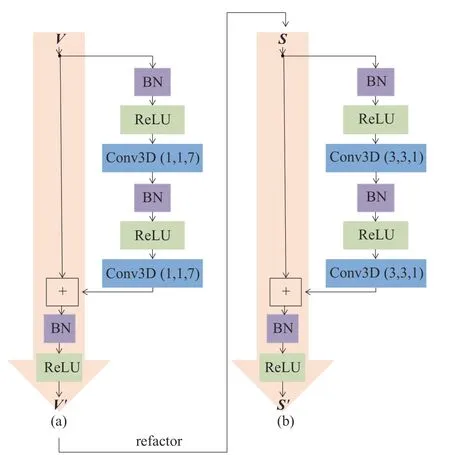
图4 基于预激活残差网络的空谱特征联合学习模块示意图Fig.4 The structure of spatial-spectral feature joint learning module based on pre-activated residual network
具体地,重校准的空谱特征V先经过预激活的光谱特征学习残差块(a),得到空间信息聚焦的光谱特征V',公式如下:

其中,Fres_spectral表示一个可学习的残差映射函数,表示Fres_spectral中所有的BN 层及Conv3D 层中可训练的参数。
然后经过refactor 层进行重构,将特征V'转换为适合下一残差块(b)输入的形式。refactor 层在转换特征的同时,也压缩了特征V'的维度,从而有效地减少了网络训练的参数。最后,将refactor层输出的转换后的特征S输入预激活的空间特征学习残差块(b),得到光谱信息聚焦的空间特征S',公式如下:

其中,Fres_spatial表示一个可学习的残差映射函数表示Fres_spatial中所有的BN层及Conv3D层中可训练的参数。
上述基于预激活残差网络的空谱特征联合学习模块中,预激活残差块一方面对进入分支的信号进行了标准化处理,通过稳定输入值的分布使得模型易于优化;另一方面在信息传播的最直接的路径(由图3 中大的橙色箭头表示)上应用了BN 层对全信号作正则化处理,避免了过拟合现象的产生。同时,预激活残差网络中构建了级联的三维卷积核大小不同的两个预激活残差块以处理高光谱图像数据。可以看出,预激活残差网络改进了原始残差构建块的网络结构,从而能在利用注意力机制重校准的空谱特征的联合学习时获取更多含有丰富的深层细节信息的特征表示,这些从高光谱图像数据中捕获的深层特征判别性更强,有利于提高分类器的分类性能。
2.4 网络训练
在基于预激活残差网络的空谱特征联合学习模块之后,使用平均池化层将提取的含有深层光谱空间信息的三维特征图转换为特征向量。最后,利用具有Softmax 函数的全连接层根据高光谱图像中土地覆盖类别的数量进行分类。全连接层作为一个分类器,可以将特征向量由特征空间映射到样本标记空间。通过采用常用的多分类交叉熵函数作为Loss 函数,计算预测向量和真值标签向量y之间的误差。网络训练的参数则通过反向传播交叉熵函数的梯度进行更新。通过参数更新,可以合理地调整特征图对分类结果的影响。多分类交叉熵函数的公式为:

其中,L表示batch_size 的大小,J表示土地覆盖类别的总数。
所有的权值都是随机初始化的,并使用Adam优化器学习三维光谱-空间滤波器组的权值。该优化器可以平滑地反向传播由损失函数生成的网络梯度流。学习率设置为0.0001,batch_size 设置为16,每次运行200 个epochs。整个过程重复5 次,以报告平均精度和标准偏差。
3 实验与分析
3.1 实验设置
为了验证本文提出的算法的有效性,在三个著名的高光谱图像分类基准数据集:印度松(Indian Pines,IP)、肯尼迪太空中心(Kennedy Space Center,KSC)以及帕维亚大学(University of Pavia,UP)上进行了分类实验。实验中,从数据集中随机挑选部分数据作为训练集,剩余的用于测试,一共进行5次实验,并计算标准差。
实验采用了总体分类精度(Overall Accuracy,OA)、平均分类精度(Average Accuracy,AA)和Kappa系数等指标,以评估模型的分类性能。其中,OA 表示在总的测试样本中正确分类样本所占的比例;AA表示每一类的分类准确率的平均值;Kappa 系数是基于混淆矩阵计算的衡量分类精度的指标,用于检验网络模型生成的分类图与给定的地面标记模板的一致性,它的值通常落在0~1 间,越接近1 表明分类精度越高。
将提出的算法与传统算法以及具有代表性的一些基于深度学习的高光谱图像分类算法进行比较,对比算法包括MLR[32]、LSTM[33]等传统算法以及ResNet[8]、MS-3DNet[34]、SSRN[10]、DPyResNet[35]、ENL-FCN[36]和A2S2K-ResNet[37]等深度学习算法。对比算法与提出的算法均使用10%的数据作为训练集,剩余的90%用于测试。并且,为了进一步验证提出的算法中空谱注意力机制以及预激活残差网络的有效性,使用5%的数据作为训练集,剩余的95%用于测试,其他实验设置保持不变,进行消融实验。实验从原始高光谱图像数据中选取大小为9 × 9 ×B的三维图像邻域块作为输入,其中B为光谱维数。实验平台的配置为GTX1080Ti 显卡以及Linux操作系统,并基于Pytorch深度学习框架实现。
3.2 实验数据集
IP 数据集是由AVIRIS 传感器在印第安纳州西北部的印度松测试现场获取的场景,由145x145 像素和224 个波段组成,其中有效波段200 个。此场景是较大场景的子集,一共有16个农作物类别。
KSC 数据集是由AVIRIS 传感器在佛罗里达州肯尼迪太空中心拍摄获取的场景,一共包含了224个波段,经过水汽噪声去除后还剩下176 个波段。此场景的几何分辨率为18 米,一共有13 个类别,代表了此场景中的各种土地覆盖类型。
UP 数据集是由ROSIS 传感器在意大利北部帕维亚上空进行的一次飞行比赛中获得的场景,由610x340 像素和103 个波段组成。此场景的几何分辨率为1.3米,一共有9个地物类别。
3.3 实验结果分析
本文提出的基于空谱注意力机制及预激活残差网络的高光谱图像分类算法与8种对比算法模型在IP、KSC 和UP 数据集上的分类结果分别如表1~表3 所示。图5~图7 则分别给出了提出的算法与6种深度学习对比算法在IP、KSC 和UP 数据集上的高光谱图像分类图。
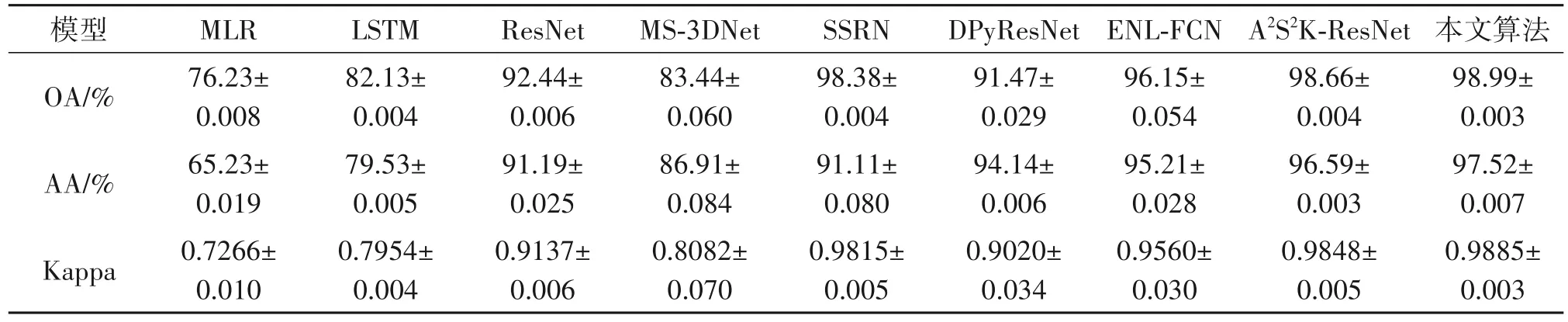
表1 不同算法模型在IP数据集上的分类结果Tab.1 Classification results of different algorithm models for IP dataset
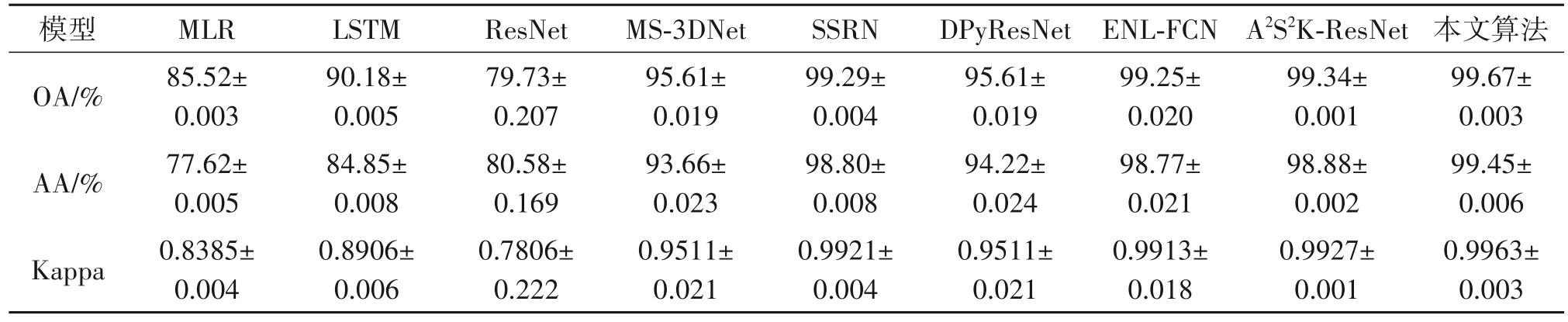
表2 不同算法模型在KSC数据集上的分类结果Tab.2 Classification results of different algorithm models for KSC dataset

表3 不同算法模型在UP数据集上的分类结果Tab.3 Classification results of different algorithm models for UP dataset
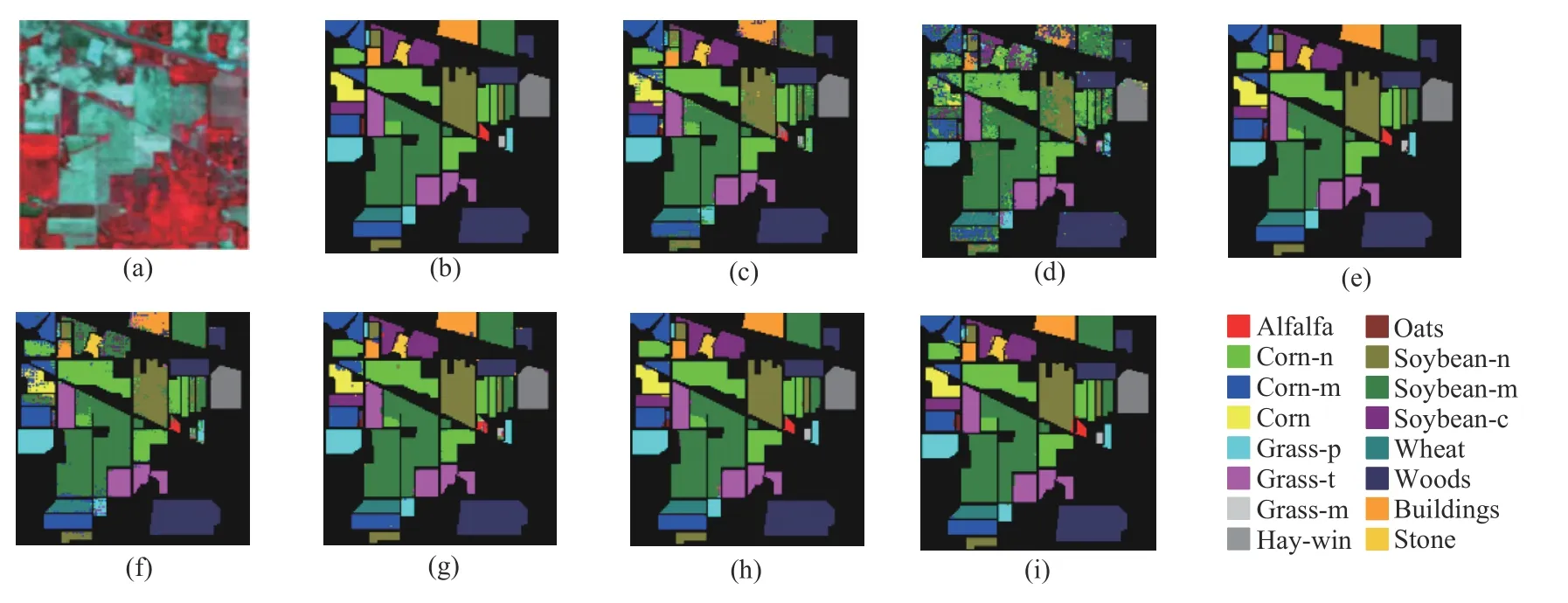
图5 IP数据集分类图,(a)伪色彩图像,(b)地面标记模板,(c)ResNet,(d)MS-3DNet,(e)SSRN,(f)DPyResNet,(g)ENL-FCN,(h)A2S2K-ResNet,(i)本文算法Fig.5 Classification map of IP dataset,(a)False-color composite image,(b)Ground truth,(c)ResNet,(d)MS-3DNet,(e)SSRN,(f)DPyResNet,(g)ENL-FCN,(h)A2S2K-ResNet,(i)Proposed algorithm
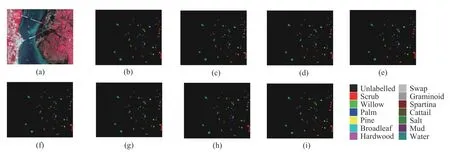
图6 KSC数据集分类图,(a)伪色彩图像,(b)地面标记模板,(c)ResNet,(d)MS-3DNet,(e)SSRN,(f)DPyResNet,(g)ENL-FCN,(h)A2S2K-ResNet,(i)本文算法Fig.6 Classification map of KSC dataset,(a)False-color composite image,(b)Ground truth,(c)ResNet,(d)MS-3DNet,(e)SSRN,(f)DPyResNet,(g)ENL-FCN,(h)A2S2K-ResNet,(i)Proposed algorithm
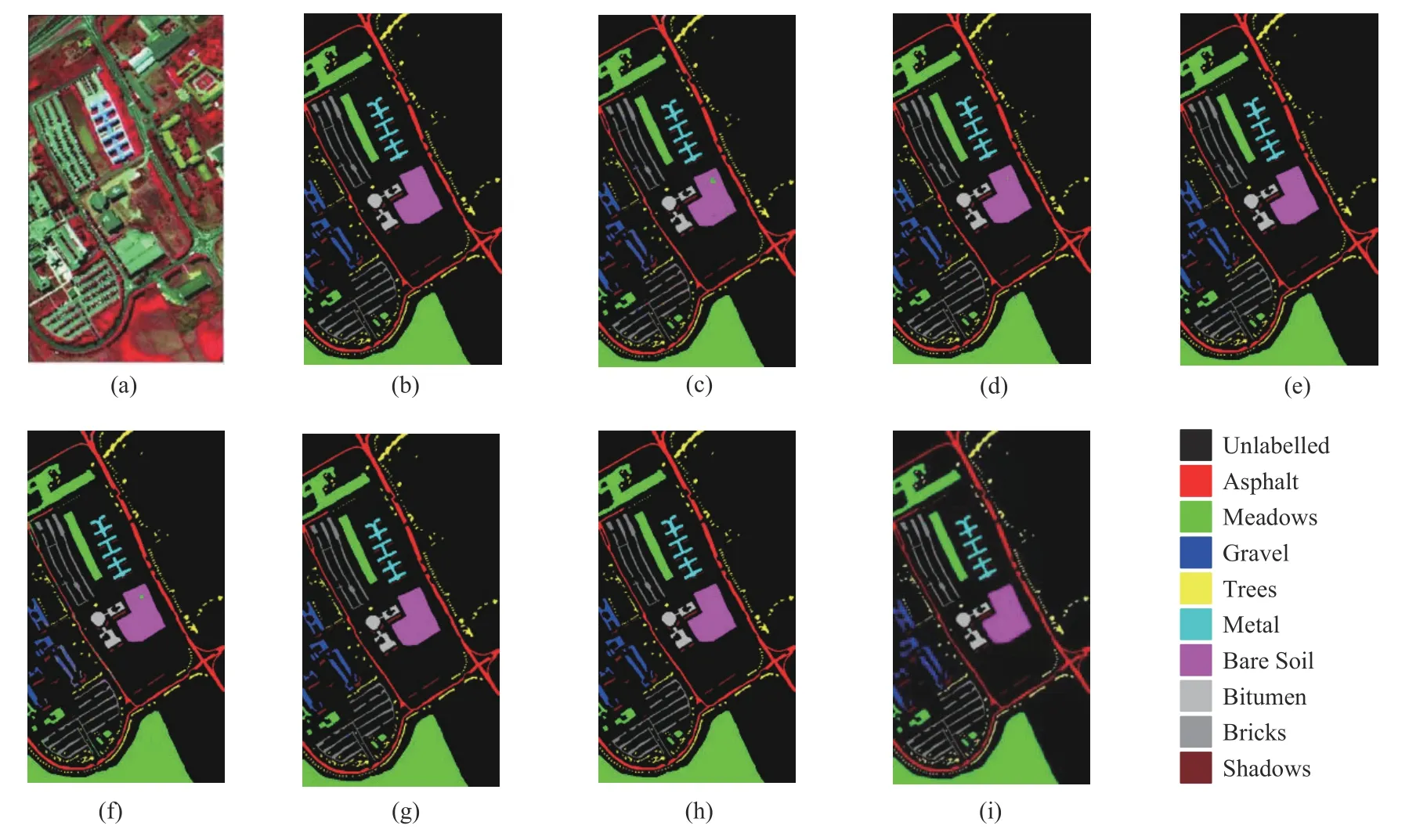
图7 UP数据集分类图,(a)伪色彩图像,(b)地面标记模板,(c)ResNet,(d)MS-3DNet,(e)SSRN,(f)DPyResNet,(g)ENL-FCN,(h)A2S2K-ResNet,(i)本文算法Fig.7 Classification map of UP dataset,(a)False-color composite image,(b)Ground truth,(c)ResNet,(d)MS-3DNet,(e)SSRN,(f)DPyResNet,(g)ENL-FCN,(h)A2S2K-ResNet,(i)Proposed algorithm
从表1~表3 可以看出,在三个数据集上,本文算法的分类结果在OA、AA 和Kappa 上均优于8 种对比算法。其中,在IP 数据集上分类准确率提升最多,在UP 数据集上分类准确率提升最少。这与训练数据的标记样本数量有关,UP数据集的标记样本数量是最多的,原来的一些算法在10%的有限训练样本下,UP数据集上的分类结果都几乎达到了99%以上,所以可提升空间有限。而IP 数据集的标记样本数量最少,尤其是其中的第9 类(图5 中的Oats),仅包含20 个标记样本,所以该数据集更具挑战性,可提升空间更大。不同算法在IP 数据集的第9 类(Oats)的单类分类精度如表4 所示。从表4 可以看出,本文算法与MLR、LSTM、ResNet、MS-3DNet、SSRN、DPyResNet、ENL-FCN 以 及A2S2K-ResNet 相比,在Oats 类的分类精度上分别提高了78.45%、30.31%、23.18%、17.34%、27.76%、17.35%、11.79%和9.75%。

表4 不同算法模型关于IP数据集的Oats类的单类分类精度Tab.4 Single-class classification accuracy of different algorithmic models on the Oats of IP dataset
从图5~图7 可以看出,本文算法所产生的分类图与地面标记模板相比,分类错误的像素点更少。在最具挑战性的IP数据集的分类图(图5)中可以观察到,与图5(c)~(h)相比,图5(i)把第9 类(Oats)错误分类为其他类别的像素点更少。
因此,综合在OA、AA 和Kappa 上的分类结果、在最具挑战性的IP 数据集的Oats 类上的单类分类精度以及分类图等实验对比结果可以看出,所提出的基于空谱注意力机制及预激活残差网络的高光谱图像分类算法可以更有效地获取判别性更强的特征,从而提升分类性能。
为了验证空谱注意力机制和预激活残差网络的有效性,构建了3 个对比网络模型,使用5%的数据作为训练集进行消融实验。三个对比网络模型分别是不包含空谱注意力机制的预激活残差网络(模型1)、包含空谱注意力机制的原始残差网络(模型2)以及本文提出的包含空谱注意力机制的预激活残差网络(模型3)。这三个网络模型在IP、KSC 和UP 数据集上的分类结果分别如表5~表7 所示。从表5~表7 中可以看出,在三个数据集上,本文算法(模型3)的分类结果在OA、AA 和Kappa 上均优于模型1 和模型2。与不包含空谱注意力机制的模型1 相比,本文算法(模型3)在三个数据集上的分类性能都有明显提升,表明空谱注意力机制的有效性。另外,与将预激活残差网络替换为原始残差网络的模型2 相比,本文算法(模型3)在标记样本数量充足的KSC、UP数据集上提升较少,在标记样本数量较少的IP 数据集上的分类性能提升明显,也表明了预激活残差网络的有效性。
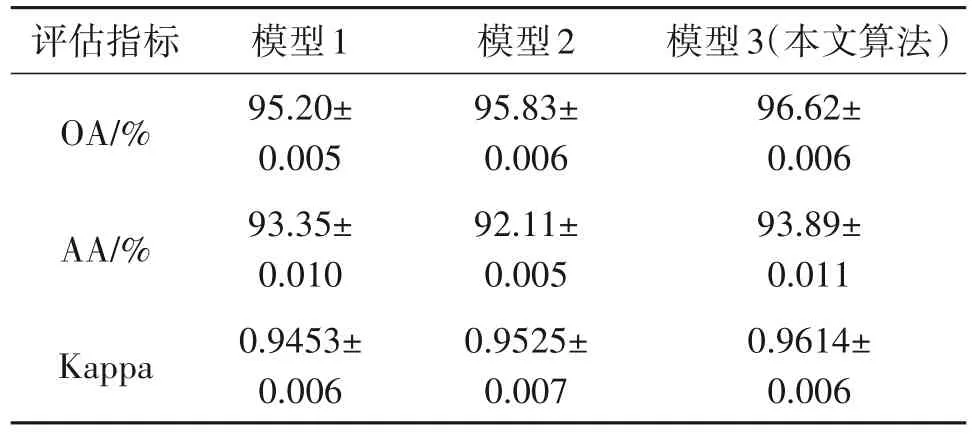
表5 不同网络模型在IP数据集上的分类结果Tab.5 Classification results of different network models on IP datasets
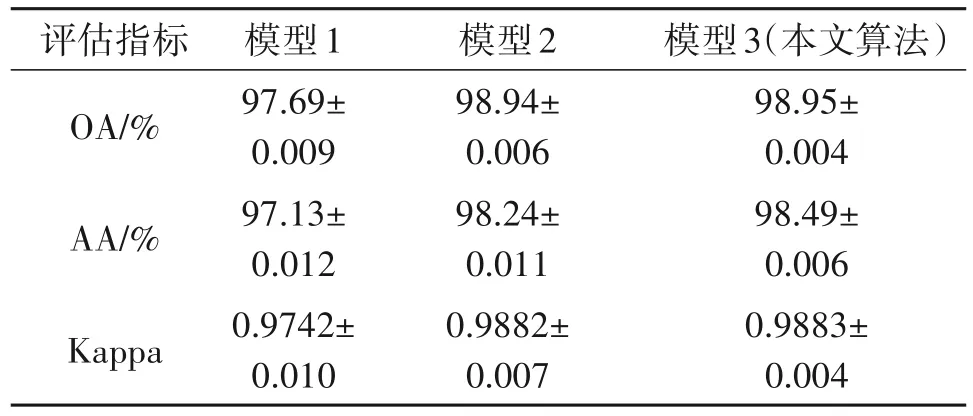
表6 不同网络模型在KSC数据集上的分类结果Tab.6 Classification results of different network models on KSC datasets

表7 不同网络模型在UP数据集上的分类结果Tab.7 Classification results of different network models on UP datasets
为了比较不同网络模型的复杂度,表8 给出了不同深度学习算法模型的参数量,即反向传播过程中更新的可训练权重参数的数量。对比表8中不同模型使用的参数量,可以观察到,ENL-FCN 使用的参数数量最少,而ResNet 需要的参数数量最多。提出的算法模型与SSRN、A2S2K-ResNet 模型使用的参数数量近似相同,但比SSRN 和A2S2K-ResNet 都要少,表明模型在分类性能提高的同时也保持了相似的模型复杂度。

表8 不同深度学习算法模型的参数量Tab.8 Parameters of different deep learning algorithm models
4 结论
针对基于深度学习的高光谱图像分类算法中提取的特征表示判别性不强而导致分类性能难以提升的问题,本文提出了基于空谱注意力机制及预激活残差网络的高光谱图像分类算法。本文算法以空间-光谱信息为基础,探究获取判别性更强的光谱空间特征表示的方法。所提出的基于空谱注意力机制的空谱特征提取模块可以有效地利用注意力机制捕获高光谱图像光谱信息的全局与局部相关性,以及空间信息的上下文相关性,从而对空谱特征进行重校准,为空谱特征在后续联合学习时能专注于更具辨别力的通道和空间位置提供保证。此外,所提出的基于预激活残差网络的空谱特征联合学习模块中,预激活残差网络改进了原始残差构建块的网络结构,从而能在注意力机制重校准的空谱特征的联合学习时捕获更具鉴别性的深层空谱特征,以提高分类器的分类性能。本文提出的高光谱图像分类算法在Indian Pines、Kennedy Space Center 以及 University of Pavia 这3 个数据集上进行了实验,实验结果表明,提出的算法可以有效提升高光谱图像分类性能,验证了算法在提取判别性更强的特征表示方面的有效性和鲁棒性。后续可考虑通过获取不同尺度上的空间-光谱信息对网络进行改进,以进一步提高获得的特征的鉴别性,提升高光谱图像分类的准确率。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31 08:58:58
网络安全与数据管理(2022年3期)2022-05-23 13:26:48
小雪花·成长指南(2022年1期)2022-04-09 18:39:41
北京航空航天大学学报(2020年10期)2020-11-14 09:26:02
自动化学报(2019年6期)2019-07-23 01:18:32
传媒评论(2017年3期)2017-06-13 09:18:10
第二课堂(课外活动版)(2016年2期)2016-10-21 16:58:54
中国光学(2015年5期)2015-12-09 09:00:28
河南科技(2015年8期)2015-03-11 16:23:52
食品工业科技(2014年23期)2014-03-11 18:18:54