预测式公交信号优先控制方法研究
2022-02-09 00:30吴楠
交通科技与管理 2022年1期
吴楠
摘要 公交信号优先控制是实现公交优先的重要技术手段,在分析现有公交优先控制策略的基础上,文章提出一种新的基于预测的信号优先的方法——预测式公交信号优先。首先用模型预测车辆到达交叉口的时间,然后根据预测结果,依次小幅调整后续相位的配时,使得在车辆到达交叉口时正好显示绿灯。这种方法由于加入了预测模型,所以给予信号系统充分的时间调整配时,所以信号调整会更平滑,避免仓促调整所带来的过大延误。
关键词 预测式;公交信号;优先控制
中图分类号 U491.54 文献标识码 A 文章编号 2096-8949(2022)01-0021-03
0 引言
公交信号优先可以分为被动式和主动式,早期以被动式公交优先为主。随着检测和控制技术发展,主动式公交信号优先逐渐成为主流,这种方法需要安装检测装置和优先请求装置,最常见的主动式公交优先策略是绿灯延长和绿灯早显。绿灯延长是当公交车辆靠近交叉口时,如果此时的信号显示为绿灯,则延长绿灯直至公交车辆离开交叉口。而绿灯早显是指当公交车辆靠近交叉口时,如果此时的公交车辆方向上的信号显示为红灯,则缩短其他方向的绿灯显示时间,使得公交相位及早到来。
1 预测式公交信号优先方法介绍
预测式信号优先通过在交叉口上游一段距离设置前置检测器,从检测器所在的位置开始实施预测式信号优先控制。由于采用GPS定位连续跟踪测量车辆位置,所以该检测器可以是虚拟的。只是在车辆经过此检测器所在位置时,即开始预测到达时间并逐步进行相位调整[1]。
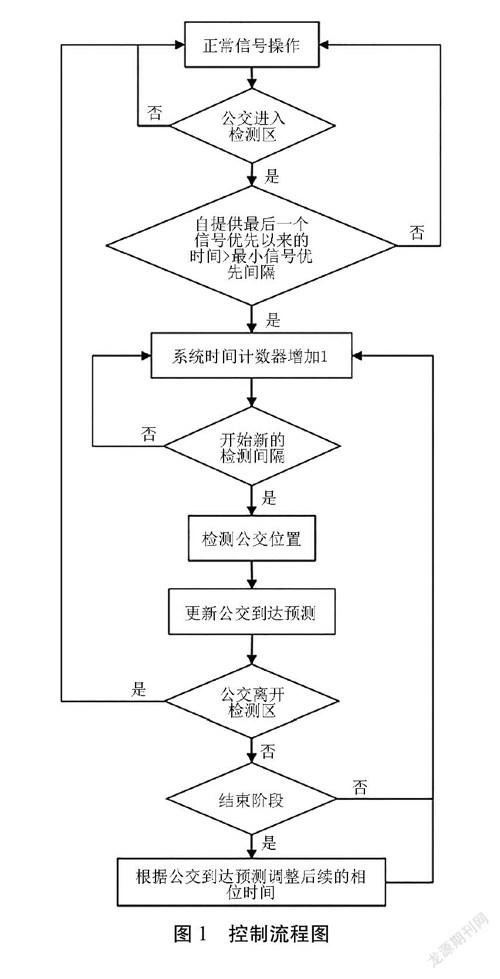
控制流程如图1所示。首先,定义前置检测器与交叉口之间的道路段落是检测区。利用公交车载的GPS系统,隔一段时间检测一次公交车辆位置(例如5 s),根据车辆位置判断是否有公交车辆处在检测区内。如果有的话,考虑是否满足最小公交优先间隔限制(指距离上一次实施公交信号优先的时间间隔不能太短,防止频繁打断正常信号),如果满足的话,根据车辆的位置信息预测到达交叉口的时间并根据预测调整信号配时。值得注意的是,车辆现状位置隔一段时间更新一次,预测和信号配时调整方案也要跟着更新。
由此可见,控制方法的重点主要是预测车辆到达交叉口时间以及根据预测来调整信号相位时间。
预测到达时间的方法采用Tan提出的“线性回归历史模型”和“自适应模型”融合预测算法。该算法融合了公交车自动定位系统记录的历史行程时间数据和实时公交车位置数据,估计公交车到达交叉口的时间。该算法经检验认为可以满足信号优先控制的精度要求[2]。
(1)
其中=融合预测算法预测的公交车辆到达时间;
=历史数据算法预测的公交车辆到达时间;
=实时数据算法预测的公交车辆到达时间;
标准差,由历史数据得出;
标准差,由实时数据得出。
但预测总存在一定的误差,该文引入“预测窗”的概念来应对误差的影响,将预测到达时间设置为一个时间区间“预测窗”而不是一个“时间点”。时间窗是以预测到达时间点为中点,往前和往后各推一个预测模型的标准差的一个时间段:
(2)
2 仿真验证
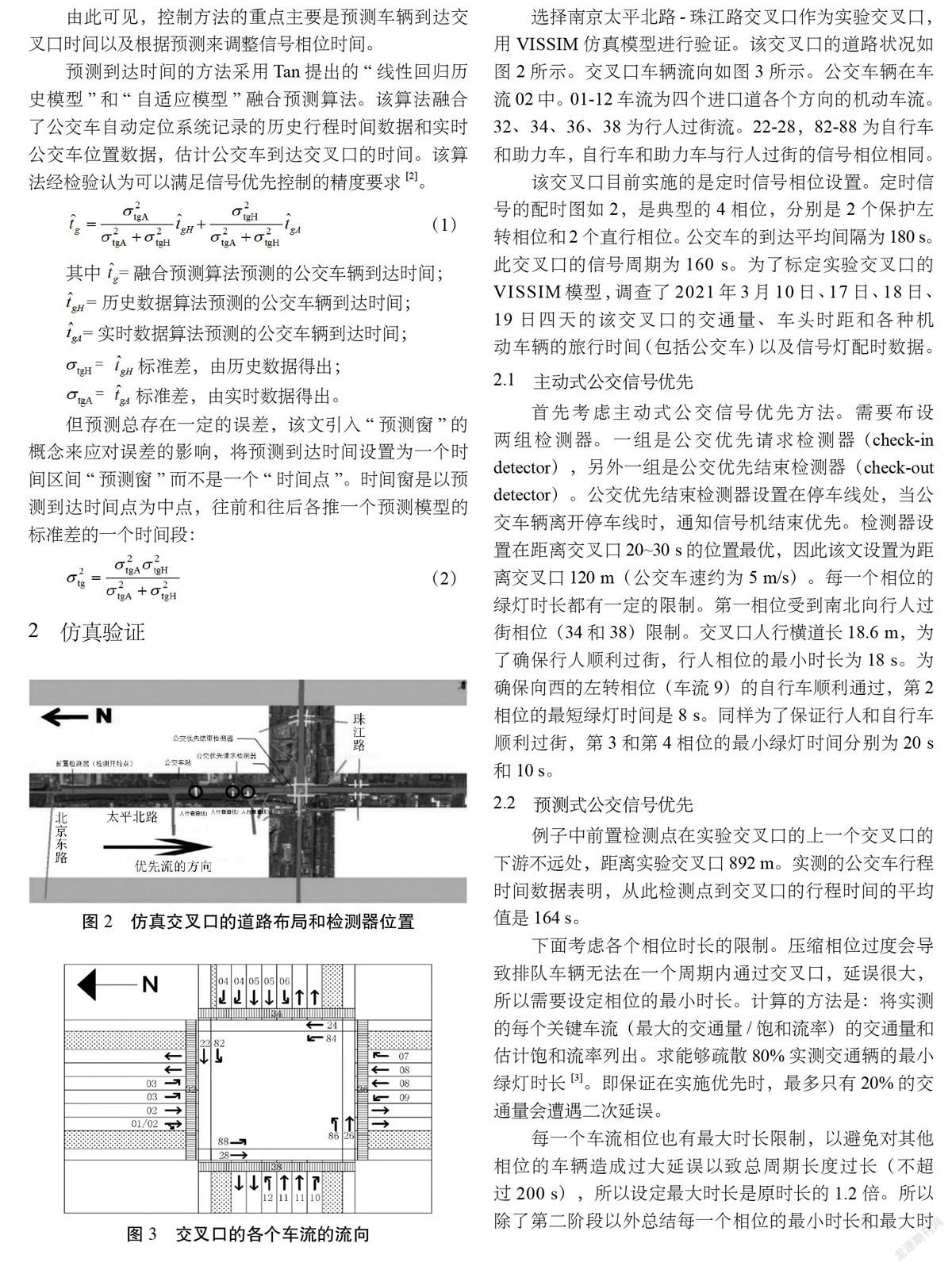
选择南京太平北路-珠江路交叉口作为实验交叉口,用VISSIM仿真模型进行验证。该交叉口的道路状况如图2所示。交叉口车辆流向如图3所示。公交车辆在车流02中。01-12车流为四个进口道各个方向的机动车流。32、34、36、38为行人过街流。22-28,82-88为自行车和助力车,自行车和助力车与行人过街的信号相位相同。
该交叉口目前实施的是定时信号相位设置。定时信号的配时图如2,是典型的4相位,分别是2个保护左转相位和2个直行相位。公交车的到达平均间隔为180 s。此交叉口的信号周期为160 s。为了标定实验交叉口的VISSIM模型,调查了2021年3月10日、17日、18日、19日四天的该交叉口的交通量、车头时距和各种机动车辆的旅行时间(包括公交车)以及信号灯配时数据。
2.1 主动式公交信号优先
首先考虑主动式公交信号优先方法。需要布设两组检测器。一组是公交优先请求检测器(check-in detector),另外一组是公交优先结束检测器(check-out detector)。公交优先结束检测器设置在停车线处,当公交车辆离开停车线时,通知信号机结束优先。检测器设置在距离交叉口20~30 s的位置最优,因此该文设置为距离交叉口120 m(公交车速约为5 m/s)。每一个相位的绿灯时长都有一定的限制。第一相位受到南北向行人过街相位(34和38)限制。交叉口人行横道长18.6 m,为了确保行人顺利过街,行人相位的最小时长为18 s。为确保向西的左轉相位(车流9)的自行车顺利通过,第2相位的最短绿灯时间是8 s。同样为了保证行人和自行车顺利过街,第3和第4相位的最小绿灯时间分别为20 s和10 s。
2.2 预测式公交信号优先
例子中前置检测点在实验交叉口的上一个交叉口的下游不远处,距离实验交叉口892 m。实测的公交车行程时间数据表明,从此检测点到交叉口的行程时间的平均值是164 s。
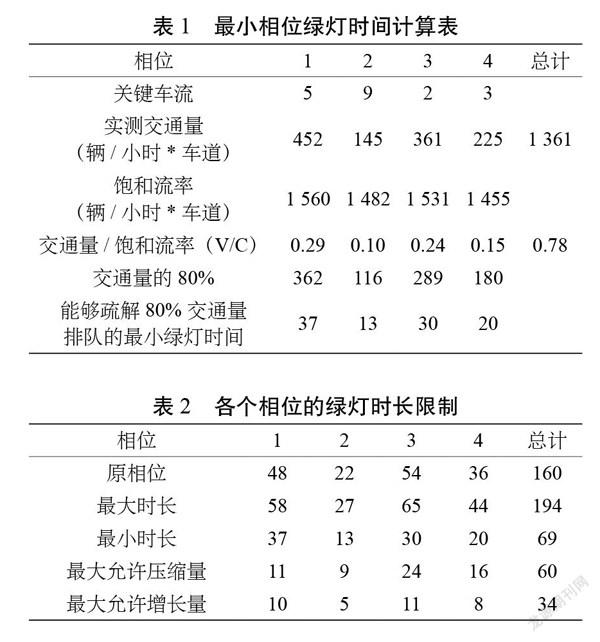
下面考虑各个相位时长的限制。压缩相位过度会导致排队车辆无法在一个周期内通过交叉口,延误很大,所以需要设定相位的最小时长。计算的方法是:将实测的每个关键车流(最大的交通量/饱和流率)的交通量和估计饱和流率列出。求能够疏散80%实测交通辆的最小绿灯时长[3]。即保证在实施优先时,最多只有20%的交通量会遭遇二次延误。
每一个车流相位也有最大时长限制,以避免对其他相位的车辆造成过大延误以致总周期长度过长(不超过200 s),所以设定最大时长是原时长的1.2倍。所以除了第二阶段以外总结每一个相位的最小时长和最大时长如表2。
用VISSIM自带的VAP模块自定义了预测式公交信号优先的策略。
2.3 两种策略的仿真比较
2.3.1 饱和度对公交车和非公交平均延误的影响
将预测式公交优先与传统无预测公交优先分别与无公交优先的情况进行比较。
无预测的公交优先对公交延误的减少效果是从42 s到19 s,大约为50%。并且随着饱和度的增加(从0.68增加到0.98),其他机动车和非机动车的延误显著增加,和无控制的情况相比,机动车延误最多要多25%。非机动车延误要多12%。可见对非公交交通的负面影响较大。
而通过实施预测式信号优先,公交车的延误大大降低了(85%),在高饱和度的情况下,公交延误降低的幅度也没有显著减少。同时机动车(非公交)和非机动车的延误没有明显变化(增加量小于10%),对非公交交通负面影响相对小很多[4]。
2.3.2 不同优先策略下的公交车辆接受优先的比较
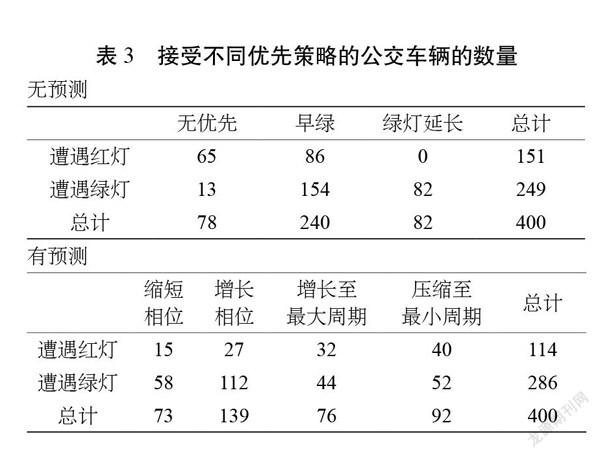
表3比较了不同优先策略下公交车辆接受优先的情况。
从表3可以看出,传统的无预测优先策略下,有一部分公交车(占总数的19.5%)无法得到优先,当然其中也包括正好在绿灯时间到达,不需要请求优先的,占总车辆数的3.3%,在接受早绿优先的车辆中,大部分车辆都遇到绿灯(占所有早绿的35.8%),少部分由于延长的绿灯时间不够而不能享受绿灯,绿灯延长策略中,由于优先检测器离交叉口较近,所以延长时间不可能超过相位3(公交相位)的最大绿灯时间。而预测式优先策略下,公交车都能享受到优先权。由于预测失败或者无法调整配时使预测窗完全落入绿灯中,在有些时候,仍有机会遇到红灯。但是总体而言,车辆在预测式优先下更多地遇到绿灯,所以延误减少了。
3 总结和展望
该文研究了预测式的公交信号优先的方法。这种方法是在传统的主动式公交信号优先在复杂交叉口实施过程中受到多种限制的条件下开发出来的,可以在不大幅增加其他交通方式延误的情况下,有效减少公交车在交叉口的延误。因为交叉口延误占公交行程时间的较大比重,并且由于随机到达,交叉口延误也是随机的。所以,减少交叉口的延误,实际上可以提高公交车运行时间的可靠性和乘客等待时间高度相关的运行时间的百分位值,例如95百分位值也会有大幅减少,乘客的等待时间也会相应减少。下一步研究可以考虑将单点的方法推广到整条线路甚至区域的公交线路,需要研究公交优先请求存在冲突的情况下如何处理,同时还可以尝试改进公交车到达时间预测来改善实施效果。
參考文献
[1]薛艳青.城市道路平面交叉口公交优先智能信号控制系统研究[J].交通工程,2020(5):74-78.
[2]许超然.考虑公交路权优先的信号协调控制研究[D].西安:长安大学,2019.
[3]吴皓,张海波.公交信号优先控制系统的应用与分析[J].电子世界,2018(17):113-115.
[4]张岩.基于公交优先的城市交叉口信号控制研究及仿真[D].大连:大连交通大学,2018.