油菜精量联合直播机随速播种控制系统设计与试验
2022-02-08 13:30廖庆喜张青松王宝山杜文斌
农业机械学报 2022年12期
廖庆喜 吴 崇 张青松 王宝山 杜文斌 王 磊
(1.华中农业大学工学院, 武汉 430070; 2.农业农村部长江中下游农业装备重点实验室, 武汉 430070)
0 引言
油菜精量播种技术具有节种、省工和增效等优点,已成为油菜机械化播种的主要发展趋势,其核心是根据农艺要求提供均匀的种子流,为种子发芽、光水肥气充分利用提供良好条件[1-3]。
国内外对精量播种技术的研究主要集中在排种器的结构设计和参数优化[4-5],目前有多种性能稳定、播种精度高的排种器在生产实践中应用[6-7]。传统油菜播种机多采用地轮驱动排种器,搭配手动变速箱调节播量及播种粒距[8-9],但由于田间工况复杂、机具工作振动大,高速作业时易出现地轮打滑、悬空,链条跳动等现象,对播种质量有较大影响[10-14]。且通过手动变速箱调节播量,使播量仅能在固定挡位调节,难以满足不同种植农艺要求及作业速度下对播量精准调控的要求。
为实现高速精量播种与播量精准调节,学者对排种器的驱动及测速方式进行了广泛研究[15-17]。多采用电驱动,地轮编码器[18-19]、卫星定位模块[20]或地速雷达等方式测速,实际应用中各种测速方式的适宜测速区间具有明显差异,无法保证不同工况及不同速度下的测速准确性。
针对以上问题,本文设计一种基于地轮编码器和北斗信号接收器(简称北斗接收器)两种测速方式的随速播种控制系统。以2BFQ系列油菜精量联合直播机为平台,搭载不同类型排种器,通过微信小程序[21]设置播种作业参数并显示系统作业信息,利用差压变送器获取负压输送头处实时负压以判断吸附种子状态,STM32主控器自动选择速度源,生成电机控制指令并驱动电机转动,满足随速精量播种要求,为油菜播种机随速控制系统结构优化提供参考。
1 系统整体设计和工作原理
油菜随速播种控制系统主要由STM32主控器、蓝牙模块、微信小程序交互端、北斗接收器、地轮编码器、差压变送器及驱动模块等组成,其整机结构如图1所示,控制系统结构如图2所示。

图1 整机结构示意图Fig.1 Structural diagram of whole machine1.地轮编码器 2.差压变送器及负压输送头 3.48V转24V模块 4.步进电机驱动器 5.主控器 6.48V电源 7.北斗接收器 8.5V USB供电模块 9.蓝牙模块 10.排种驱动模块
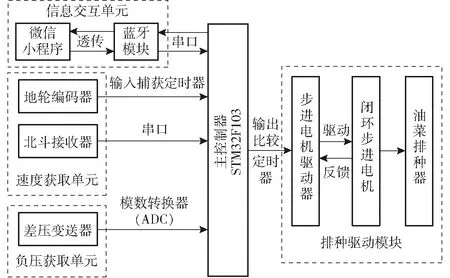
图2 控制系统结构框图Fig.2 Structural diagram of control system
系统初始工作时,蓝牙模块进入透传模式使主控器与小程序建立连接,用户通过微信小程序设置播种参数信息,地轮编码器、北斗接收器及差压变送器同时进入工作状态,主控器最先读取差压变送器的负压信号,若负压达到吸附种子临界负压则开展播种作业,打开电机使能开关,读取地轮编码器和北斗接收器的速度信号,根据速度信号与设定好的参数信息生成电机控制指令,使STM32的定时器通过PWM模式产生目标频率的脉冲,脉冲进入电机驱动器经过电流环和速度环等PID运算,控制步进电机快速响应,以目标转速驱动排种轴转动。拖拉机变速工作时,主控器自动选择地轮编码器与北斗接收器中较准确的速度源以驱动电机。若负压输送头处负压未达到临界负压,则主控器停止发送电机驱动脉冲,停止读取速度信号,并持续监测和判断负压值,实现随拖拉机前进速度调整排种轴转速,达到精量播种的目的。
2 系统硬件设计
2.1 信号处理模块
主控器选用意法半导体公司生产的基于ARMv7架构的32位Cortex-M3内核的STM32F103VET6单片机。该单片机拥有512K flash、64K SRAM,最高运行频率72 MHz;同时拥有多路模数转换器、定时器及通信接口,可以满足高性能、低功耗及低成本的设计要求。
2.2 信号采集模块
2BFQ系列油菜精量联合直播机搭载一器双行正负气压组合式精量排种器,为获取播种作业状态,采用佛山一众传感仪器有限公司生产的YZ1301型差压变送器采集负压输送头负压。
地轮编码器采用欧姆龙自动化有限公司生产的E6B2 CEZ1X型旋转增量编码器[22]。
北斗接收器采用杭州中科微电子有限公司生产的ATGM332D型北斗定位模块。
系统采用智能手机作为人机交互设备,通过蓝牙(HC-08型)与主控器搭建信息通路。
2.3 排种器驱动模块
电机是排种器驱动模块的核心工作部件,目前常用于电驱排种的为直流无刷电机[14]。相较于直流无刷电机,闭环步进电机内置加减速算法,低频特性良好、控制简单、精度高、响应快、无累积误差、具有1.5倍过载能力,能够适配常见油菜精量排种器10~60 r/min的转速范围,满足随速播种时频繁调速要求,提高播种精度。
排种器驱动模块主要由步进电机及减速器、步进电机驱动器、传动通轴、链轮及链条组成,以驱动一器双行正负气压组合式油菜精量排种器为例,结构如图3所示。

图3 排种器驱动模块Fig.3 Seed metering device drive module1.86HBS120型步进电机 2.行星减速器 3.十字万向节联轴器 4.一器双行正负气压组合式油菜精量排种器 5.传动通轴 6.1∶1传动链
2BFQ系列油菜精量直播机设计播量为2 250~3 750 g/hm2,播种粒距为30~80 mm[23],排种盘型孔数为50,取目标播种粒距为50 mm,为达到12 km/h的作业速度,则排种盘转速需为80 r/min。根据最大作业速度和株距要求,选择减速器传动比为10,则步进电机驱动扭矩[24]为
(1)
式中M1——电机驱动扭矩,N·m
K——电机安全系数,取2
M2——作业时排种轴最大负荷,N·m
μ1——链轮传动比,取1
μ2——减速器传动比,取10
利用芜湖艾瑞特机电设备有限公司ATRITER BME-006型数显力矩扳手测得排种轴的启动扭矩为9.8 N·m,平稳转动扭矩为7.4 N·m。由式(1)计算得电机驱动扭矩为1.48 N·m,选用杭州步科机电有限公司生产的86HBS120型步进电机,在800 r/min时仍可保持3.1 N·m的扭矩,满足作业要求;选用步科HBS860H型闭环步进电机驱动器,该驱动器可实现电机的速度环、电流环、位置环的三环控制,系统控制响应快、精度高。
2.4 硬件系统电路
差压变送器接24 V电源,信号输出线经降压后连接主控器PC3引脚,通过ADC(模数转换器)获取输入电压,进而转化为风压信号;蓝牙模块与北斗接收器由主控器供电,分别通过UART4(串口4)和USART2(串口2)与主控器进行数据交互;步进电机驱动器接48 V电源,PULL+接主控器PA11引脚,主控器的TIM1在输出比较模式下通过PA11向驱动器传输脉冲驱动电机转动。
3 系统软件设计
本控制系统的软件主要由主控端硬件驱动程序和交互端微信小程序组成。主控端硬件驱动程序基于Keil uVision5开发,采用C语言编程。交互端微信交互小程序基于微信开发者程序进行开发,采用JavaScript语言编程。
3.1 主控端硬件驱动程序
主控端硬件驱动程序的主要功能是与交互端进行信息收发同时接收各传感器信号进行分析计算,并通过定时器输出电机控制信号,其整体流程如图4所示。系统与交互端保持通信,监听控制参数的更新,同时根据各传感器信息、交互端控制参数等计算出电机控制指令,生成特定频率的PWM波实时控制电机转速。

图4 主控端整体流程图Fig.4 Program flow chart of overall control system
3.1.1蓝牙模块配置
使用AT指令将蓝牙模块配置为从机模式,此模式下可被上位机搜索和连接;为了保证田间恶劣工况下的连接稳定性及传输距离,将波特率配置为9 600 b/s;主控器供电后,蓝牙模块进入透传模式。
3.1.2负压信号获取
差压变送器工作时输出的电压与测得的负压成正比例关系,则
AV=1.221AI
(2)
式中AV——测得的负压,Pa
AI——输入电压对应的数字量
在负压输送头的基础上添加3个和气室联通的宝塔头,封闭其中2个宝塔头,变送器负压管与未封闭宝塔头连接以获得负压,如图5所示。
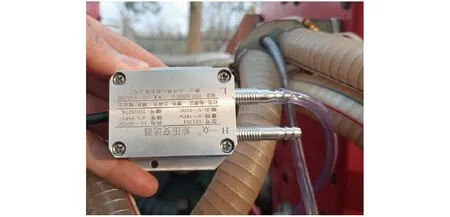
图5 差压变送器及负压输送头连接方式示意图Fig.5 Diagram of differential pressure transmitter and negative pressure delivery head connection method
利用深圳市聚茂源科技有限公司生产的标智GM511型手持式差压计在台架和田间两种条件下测得播种机负压输送头处能够吸附种子的临界负压为1 477 Pa。因此当AV≥1 477 Pa时,主控器拉高电机使能,打开PWM波生成定时器进行电机控制;若AV<1 477 Pa,主控器拉低电机使能,持续读取负压值并与临界负压对比判断。
3.1.3地轮编码器速度获取
地轮编码器与地轮通过链传动连接,如图6所示。

图6 地轮编码器装配图Fig.6 Diagram of ground wheel encoder assembly
利用主控器中定时器的输入捕获功能对编码器A和B两相的脉冲信号进行采集,用两个变量h和c分别记录脉冲数和圈数,编码器每产生4 000个脉冲定时器产生一次中断,每增加一个脉冲则h+1,每产生一个中断则c+1。通过另一个定时器以固定时间间隔t触发中断并计算此时间内的平均速度,计算后h与c清零。则拖拉机前进速度vE为
(3)
式中vE——地轮编码器测得机具前进速度,km/h
k——速度单位转换系数,取277.78
μ3——地轮与编码器传动比,取11∶10
t——速度解算时间间隔,取0.2 s
φ——地轮直径,取541 mm
αc——测速误差修正系数
3.1.4北斗接收器速度获取
ATGM332D使用NMEA0183格式[25]输出定位的原始数据。通过中科微电子公司配套的上位机程序将模块的接收方式设置为仅接收北斗的卫星定位数据VTG帧;设置信号更新频率为5 Hz。VTG帧基本格式如下:
$BDVTG,Congt,T,Cogm,M,Sog,N,kph,K,mode*CS,
其中kph项为对地速度,获取kph段数据即可获得拖拉机实时速度vB,速度解析流程图如图7。
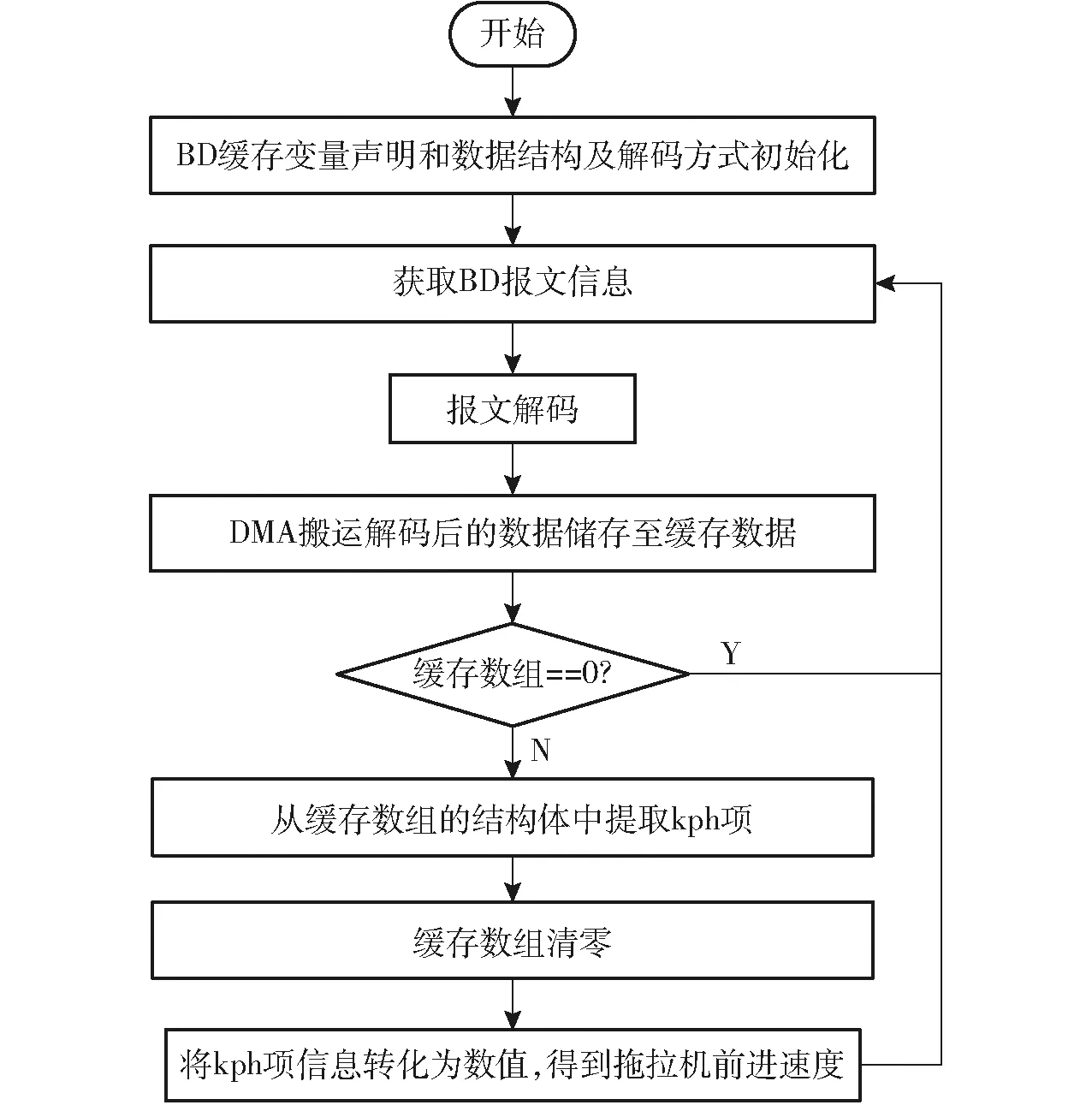
图7 北斗速度解析程序流程图Fig.7 Program flow chart of BDS speed analysis
3.1.5电机调速的数学模型
为实现随速播种控制,需电机与拖拉机前进速度动态匹配。步进电机靠脉冲驱动,本数学模型的目的是解算出所需脉冲频率。
脉冲频率与拖拉机前进速度的关系式为
(4)
式中Arr——定时器重装载值,通过TIM_SetAutoreload命令更改,以输出目标频率脉冲,调节电机转速
d——目标粒距,mm
m——排种盘型孔数
H——定时器时钟频率,取72 MHz
P——定时器预分频值,配置定时器时写入
n1——驱动器细分数
n2——电机旋转一圈所需步数,固定为200
αz——传动误差修正系数
v——拖拉机前进速度,km/h
3.1.6工作模式切换与控制
本系统有恒定转速播种和随速播种两种工作模式。其中系统处于随速播种模式时根据式(4)进行自动实时调速,进行随速播种作业;系统处于恒定转速播种模式时,排种器将被电机带动以恒定转速进行播种作业。
两种模式间可通过微信小程序设置目标粒距功能进行切换。目标粒距为正整数时,系统处于随速播种模式;目标粒距为0时,系统处于恒定转速播种模式。
恒定转速播种模式下通过微信小程序设置转速功能可向主控器传入目标转速n3,主控器内由
(5)
计算出相应Arr,生成脉冲驱动电机以定转速转动。
3.1.7随速播种模式速度源自动切换
当系统处于随速播种模式时启动速度源自动切换控制。
北斗接收器测得速度为vB,地轮编码器测得速度为vE,切换测速方式临界速度为vL。速度源v选择模式如表1。

表1 速度源切换逻辑Tab.1 Speed source switching logic
3.2 交互端微信小程序设计
3.2.1功能设计
人机交互端的主要功能是根据实际作业情况设置目标粒距、固定转速、排种盘型孔数、机具幅宽、传动比、地轮直径及滑移率7个设置参数;实时显示吸种负压、机具前进速度、排种轴转速、播种面积、播种量及工作模式6个显示参数。
3.2.2软件下载与界面设计
使用智能手机打开微信,在小程序界面搜索小程序全称“随速播种控制系统蓝牙交互软件”或简称“随速控制”即可找到,点击进入自动完成下载与安装,如图8所示。

图8 小程序下载界面与运行界面Fig.8 Diagram of applet download and running interface
进入程序首先进行蓝牙连接,完成后即可进行控制。
4 关键参数标定与数据分析
衡量本系统性能的主要指标是粒距合格指数,对此指标有两个直接影响因素:测得拖拉机前进速度的准确性;电机控制精度和控制响应时间。
4.1 拖拉机测速试验
4.1.1地轮编码器测速
通过地轮编码器测速试验,标定地轮滑移率,用于修正其直接测得的速度,并确定此种测速方式适用的速度区间。
以东方红LX954型拖拉机为动力平台,搭载2BFQ-6型油菜精量联合直播机。分别以慢1、慢2、慢3、慢4、中1、中2(额定空载速度2.17~7.99 km/h)6个速度挡位前进,放下三点悬挂、地轮空载、打开PTO驱动旋耕刀以模拟实际田间工作情况,利用卷尺对拖拉机前进距离进行测量,利用地轮编码器记录转动圈数并通过蓝牙模块输出至手机,数据更新频率为5 Hz,计算地轮上定点摆线长度与拖拉机位移之比,算得地轮滑移率。地轮滑移率计算公式为
(6)
式中s——地轮滑移率,%
L——拖拉机总位移,m
n——地轮总转动圈数,r
试验结果如表2。

表2 地轮编码器测速试验结果Tab.2 Result of land wheel encoder speed test
此种测速方式下,拖拉机在低速(1.44~3.78 km/h)前进时地轮滑移率为3.09%~5.90%,且随着速度的增大,滑移率没有明显增加;中高速(4.76~7.99 km/h)前进时滑移率为9.56%~20.05%,且随着速度的增大,滑移率不断增大。
引入测速误差修正系数αc对测得的速度进行修正,修正后的速度作为vE传入主控器用于生成电机控制指令,则有
(7)
故地轮编码器的适宜测速区间应低于3.78 km/h,此时滑移率取最大值为5.90%,则αc为1.063。
4.1.2北斗接收器测速
在华中农业大学现代农业种植示范基地的平整直线水泥路使搭载北斗接收器的拖拉机原地静止以及以2、3.5、4.5、6、8、10、12 km/h的速度直线前进,测定各速度下传回的速度信息各290~750组,利用SPSS软件分析误差的分布规律。试验结果如表3。

表3 北斗接收器测速数据Tab.3 Statistics of BDS receiver speed
拖拉机前进速度在3.68~12.77 km/h时,北斗接收器测速误差为-3.24%~3.40%,且随着速度的增大,测速误差较为稳定;如图9所示,拖拉机前进速度为2.36 km/h时,北斗接收器会出现1~5 s的接收速度为0的情况,导致测得速度误差较大,为-9.38%,并导致播种作业时出现较大面积漏播,故此种速度下不适宜采用北斗接收器测量拖拉机速度;拖拉机静止时,测得速度恒为0。

图9 低速时北斗速度数据分布曲线Fig.9 Diagram of BDS speed data distribution at low speed
由于北斗接收器测得速度的误差互有正负且绝对值较小,不超过3.4%,因此不对此速度进行修正,直接将其作为vB传入主控器用于生成电机控制指令。
4.1.3适宜测速区间
分析两种测速方式结果可得,地轮编码器的适宜测速区间为1.44~3.78 km/h,北斗接收器的适宜测速区间为3.68~12.77 km/h,如图10所示。
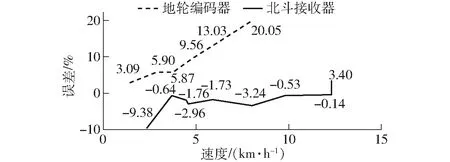
图10 双模测速误差对比Fig.10 Diagram of dual mode speed measurement error
由于地轮滑移率对土壤墒情变化极为敏感,而北斗接收器对环境变换不敏感,适用范围较广,故以3.7 km/h为临界速度,即vL=3.7 km/h。
4.2 传动系统控制试验
传动系统控制试验的目的是:判断传动系统的传动误差并进行修正;通过确定电机响应时间,以分析系统的调速频率。
试验采用开发板A驱动步进电机转动;开发板B适配编码器,并通过串口与计算机进行通信,传输实时转速等数据,传输频率50 Hz。为模拟正常播种工作情况,将电机装在直播机上,并打开PTO产生正常工作时的负压,通过联轴器将编码器与传动通轴连接,测量传动通轴的转速。通过开发板A的按键驱动电机变速;通过开发板输入计算机显示与记录。
4.2.1传动精度试验及数据分析
表4为传动精度试验结果。由表可知,当理论排种速度为10.05~50.74 r/min时,实际转速与理论转速的平均偏差为-5.31%,则传动误差修正系数αz=1.056。

表4 传动精度试验结果Tab.4 Result of transmission accuracy test
影响传动精度的因素有:电机自身精度、测速程序、传动结构。使用同一测速程序测量电机的空载转动精度,测得转速误差为当前转速的万分之一,处于本电机25倍细分下标称误差0.2%内,符合转动精度要求,排除了电机自身精度及测速程序对传动误差的影响。传动结构部分采用了10∶1行星减速器、十字万向节联轴器、传动通轴等,查阅相关文献得知各传动零部件均不会导致出现稳定在-5%左右的误差,则此稳定误差为系统误差。如表5所示,引入修正系数αz=1.056后可将传动系统误差控制在-1%以内,符合传动精度要求。
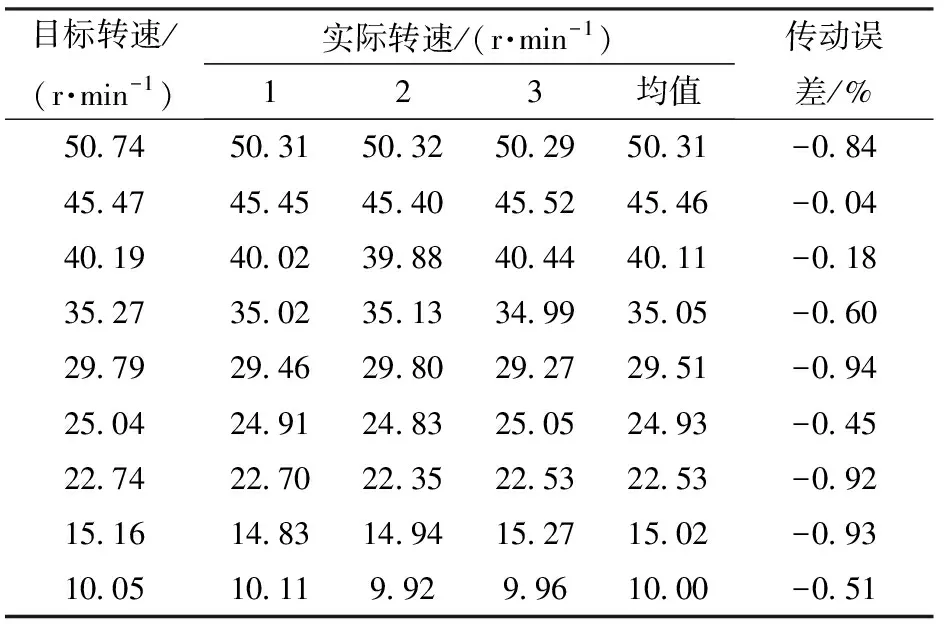
表5 修正后传动精度Tab.5 Transmission accuracy after correcting
4.2.2控制响应时间试验
表6为控制响应时间试验结果。以15 r/min为基准转速,当速度增量为5、10、15、20、25、30、35 r/min时,响应时间均不大于73 ms。
4.2.3电机调速频率
电机的控制响应时间为73 ms,则最高电机调速频率为13.7 Hz,北斗接收器刷新信息的频率为1~10 Hz,编码器测速频率可在较大范围实现。

表6 控制响应时间Tab.6 Control response time
考虑到低功耗蓝牙传输速率较低,北斗接收器测速时间间隔越长越准确,故确定电机控制速率为5 Hz。
5 试验
5.1 台架试验
5.1.1试验方法
利用华中农业大学JPZS-16型数字化三轴振动排种器性能测试试验台开展排种性能测试。利用编码器配合跑米轮测量试验台传送带速度,作为电机控制的速度源,引出ADC信号线接不同电压模拟实时负压。
试验过程中,设置目标粒距为60、80 mm共2个水平,使用同一个一器双行正负气压组合式油菜精量排种器,对照组由恒定转速的电机驱动(此恒定转速由传送带速度结合目标粒距反推),试验组为由编码器作为速度源的随速播种控制系统,试验具体配置如图11所示。
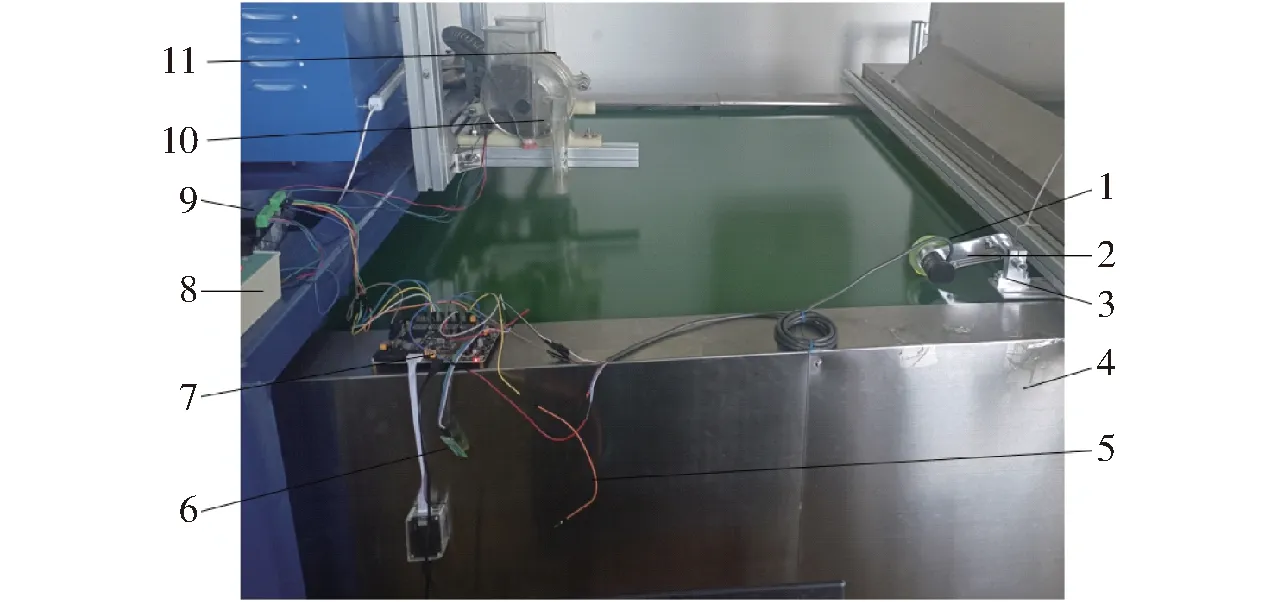
图11 台架试验配置图Fig.11 Diagram of bench experiment configuration 1.200 mm跑米轮 2.编码器 3.同步支架 4.JPZS-16型数字化三轴振动排种器性能测试试验台 5.ADC信号输入线 6.蓝牙模块 7.控制板 8.脉冲发生器 9.步进电机驱动器 10.一器双行正负气压组合式油菜精量排种器 11.步进电机
以传送带不同速度为单一变量,设置传送带速度为2.6、3.9、5.1、5.9、7.8 km/h共5个水平,保持试验组与对照组正、负气压一致,所用电机、电源、驱动器等一致,利用排种试验台检测排种性能。
5.1.2试验结果与分析
依据NY/T 503—2015《单粒(精密)播种机作业质量》进行数据处理与评价。台架试验结果如表7所示。

表7 随速播种控制系统台架试验结果Tab.7 Bench experiment results of speed-dependent control system
5个速度水平下,目标粒距为60 mm时,试验组的粒距合格指数均优于对照组且均大于90%;目标粒距80 mm时,试验组的粒距合格指数均优于对照组且均大于92%;且速度在2.6~7.8 km/h范围内变化时,试验组均自动适应不同速度,表明随速播种控制系统满足设计要求且优于传统定转速驱动。
5.2 田间试验
5.2.1试验方法
为验证系统的作业效果,于2021年10月8日在华中农业大学现代农业种植示范基地进行油菜精量播种田间试验。配套动力为东方红954型拖拉机、播种油菜品种为华油杂62,使用搭载本系统的2BFQ系列油菜精量直播机进行播种试验,所用排种器为一器双行正负气压组合式油菜精量排种器,如图12所示。试验目标粒距为60 mm,速度水平设置为慢1、慢2、慢3、慢4、中2,其中慢1、慢2速度低于3.7 km/h,以地轮编码器作为速度源,慢4、中2速度高于3.7 km/h,以北斗接收器作为速度源,慢3速度在3.7 km/h上下跳动,以两种速度接收器作为速度源,并根据实时速度自行切换,播种作业及出苗效果如图12a、12b所示。
为验证随速播种控制系统对其他类型排种器的适用性,于2021年9月28日开展精量穴播田间试验。如图12c所示,试验地点、配套动力及油菜品种与10月8日单粒精播田间试验一致。所用排种器改为小粒径种子精量穴播集排器,采用光电传感器判断播种机进入播种位置、控制电机使能开关。

图12 田间试验及出苗效果Fig.12 Diagram of field experiment and sprouting consequent
5.2.2试验结果与分析
精量播种田间试验前,对播量进行统计测试,分别以慢1、慢2、慢3的前进速度进行播种,目标粒距60 mm,厢面长度54 m,统计6行总播量分别为30.04、30.52、30.51 g,测量得华油杂62千粒质量为5.44 g,每行播种粒数分别为920、935、935粒。计算得54 m厢面长、60 mm粒距对应的理论粒数为900粒,播种量误差分别为2.26%、3.89%、3.86%,满足精量播种播量误差国标要求。
单粒精播田间试验数据处理和评价依据NY/T 2709—2015《油菜播种机作业质量》,将粒距合格率、播种均匀性变异系数作为本系统的性能指标。
播后30 d时,按照《油菜播种机作业质量》要求,5种速度水平下的性能指标如表8所示。可得出本系统能够适应不同排种系统在作业速度1.44~7.99 km/h区间内实现播量和粒距稳定,且后期出苗效果良好,满足设计要求。
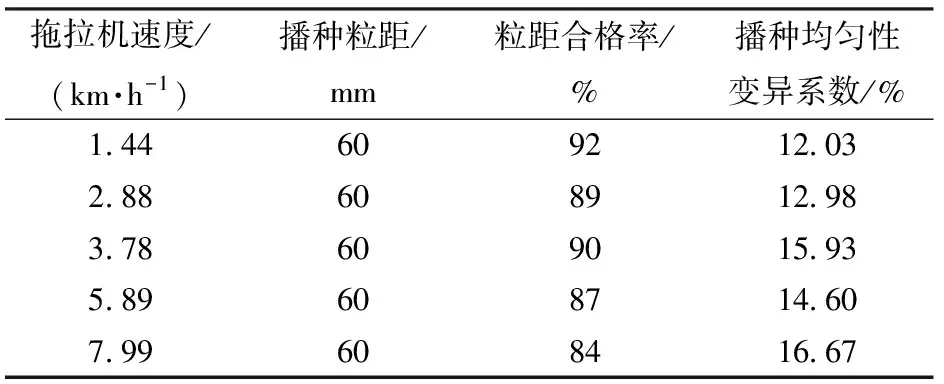
表8 粒距合格率及播种均匀性变异系数试验结果Tab.8 Statistics of qualified rate of seeding spacing and coefficient of variation of seeding uniformity
精量穴播试验结果证明,随速播种控制系统可通过微信小程序修改参数,搭配小粒径种子精量穴播集排器进行随速播种,具有较好的适用性。
6 结论
(1)设计了基于北斗接收器和地轮编码器测速的油菜随速播种控制系统,标定了吸附种子临界负压、电机调速频率、地轮编码器与北斗接收器两种测速方式不同速度下的测速误差。试验结果表明吸附种子临界负压为1 477 Pa;电机调速频率为5 Hz;地轮编码器在1.44~3.78 km/h时,滑移率最大为5.90%,速度修正系数为1.063;北斗接收器在3.67~12.77 km/h时速度误差为-3.24%~3.4%;两种测速方式的速度源切换临界速度为3.7 km/h。
(2)油菜随速播种控制系统播种与定转速播种的台架对比试验结果表明:本系统播种粒距合格指数高于定转速播种,且播种速度在2.6~7.8 km/h内变化时,本系统均可自动适应速度变化控制播种粒距。
(3)开展了以油菜随速播种控制系统驱动小粒径种子精量穴播集排器和一器双行正负气压组合式油菜精量排种器播种的田间试验,试验结果表明,本系统可适用于不同排种器,满足作业速度1.44~7.99 km/h时随速播种要求,且播量和粒距稳定,出苗效果良好,满足设计要求。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
铁道通信信号(2018年8期)2018-11-10
农业工程学报(2018年8期)2018-05-13
制造技术与机床(2017年7期)2018-01-19
西安工程大学学报(2016年6期)2017-01-15
支点(2016年11期)2016-12-22
铁道通信信号(2016年3期)2016-06-01
探测与控制学报(2015年4期)2015-12-15
现代农机(2015年2期)2015-08-26
中国水利(2015年19期)2015-04-20