
智能施药机器人关键技术研究现状及发展趋势
2022-02-06 00:48兰玉彬王宝聚宋灿灿王国宾
农业工程学报 2022年20期
兰玉彬,闫 瑜,王宝聚,宋灿灿,王国宾
智能施药机器人关键技术研究现状及发展趋势
兰玉彬1,2,3,闫 瑜1,3,王宝聚1,3,宋灿灿1,3,王国宾1,2,3※
(1. 山东理工大学农业工程与食品科学学院,淄博 255049;2. 山东省农业航空智能装备工程技术研究中心,淄博 255049;3. 山东理工大学生态无人农场研究院,淄博 255049)
喷施化学农药是病虫害防治最主要的手段,对保证作物的产量起着至关重要的作用。传统的施药机械工作效率低,且使用同一施药量进行连续喷施作业易造成农药浪费、环境污染。随着农业智能化发展,机器人被广泛应用到农业植保作业中,智能施药机器人以减少劳动力投入、提高农药利用率、减少农药施用量以及减少环境污染为目的,实现了更加高效、精准的病虫害防治。智能施药机器人是集复杂农业机械、智能感知、智能决策、智能控制等技术为一体的现代农业施药装备,可自主、高效、安全、可靠地完成施药作业任务。为明确智能施药机器人及关键技术的国内外研究现状,本文总结了适用于不同作业场景的施药机器人的应用进展,从智能施药机器人的移动平台设计、喷雾装置设计、导航技术、智能识别技术4个方面进行分析,结合施药机器人作业环境的复杂多变性,分析智能施药机器人关键技术的现存问题,阐述智能施药机器人未来的发展趋势是精准变量施药、自主导航以及无人化作业,以期为智能施药机器人在未来的研究提供参考。
施药机器人;智能感知;自主作业;机器人平台;喷雾装置
0 引 言
病虫害是影响作物生长的重要因素,不及时处理病虫害问题,会导致作物长势缓慢,影响作物的产量和质量,甚至造成大面积作物的枯萎。据联合国粮食及农业组织(Food and Agriculture Organization of the United Nations)估计,每年由病虫害导致的粮食减产约为总产量的1/4,其中病害造成的损失为14%,虫害造成的损失为10%[1]。
为保证作物的产量以及质量,需要定期进行病虫害防治。现有的病虫害防治方式有物理防治、生物防治、化学防治,化学防治是目前最广泛应用的病虫害防治方法[2]。传统施药机械中应用最广泛的是背负式喷雾器、喷雾枪、拖拉机悬挂式打药机等,为了达到防治效果,多采用覆盖式喷洒农药的方式,造成了农药浪费以及环境污染,弥漫在空气中的农药也对操作者会造成不可逆的体伤害。同时传统的施药作业需要大量的劳动力,造成了农业成本的增加。
解决传统施药方式的人力、环保以及安全等问题的关键是研究开发智能施药机器人,利用靶标识别技术识别出病虫害,结合喷雾控制装置实现精准喷施以减少农药的使用量,同时结合导航技术实现智能施药机器人的无人化作业。2022年中央一号文件提出,加强农机装备工程化协同攻关,加强高端智能机械研发制造[3],农业装备的智能化是中国农业高质量发展的主要方向,目前急需一种智能的技术和植保机械来满足未来农业的施药需要。智能施药机器人可以携带大型药箱增加单次作业时间,同时实现安全自主地导航操作,并设置目标检测系统以及相应的喷雾装置,能够针对农作物的病虫害进行精准喷施。智能施药机器人进行无人化精准变量施药工作,解决了劳动力短缺和安全风险的问题,同时减少农药的使用量,实现农业的生态可持续化发展。
本文讨论了近年来智能施药机器人开发的相关研究,从机器人的移动平台设计、喷雾装置、导航技术、智能识别4个方面评述了施药机器人的研究进展,这四方面是智能施药机器人研究的关键环节。在此基础上总结了现有技术的局限性,展望了智能施药机器人的发展趋势,以便为施药技术的发展提供参考。
1 智能施药机器人发展现状
施药作业经历了传统人工施药、机械化施药、自动化和智能化施药4个发展阶段,智能施药机器人是施药作业的必然发展趋势。智能施药机器人是集农业机械、智能感知、智能决策、智能控制等技术为一体的智能农业施药装备,可自主、高效、安全、可靠地完成施药作业任务。其主要工作流程如下:智能识别系统获取并处理病虫草害信息,喷雾执行系统根据智能识别系统所传递出的作物信息进行定点、定量的完成喷雾作业,智能导航系统生成机器人的作业路径,控制机器人自主作业。
智能施药机器人技术受物联网、大数据、人工智能、传感器等前沿技术的牵引,已逐渐应用到不同施药作业场景中,世界各国对自主、高效和精准施药技术的发展潜力及应用前景有着广泛共识,纷纷研发各式各样的智能施药机器人等智能化装备。
1.1 大田智能施药机器人发展现状
大田智能施药机器人是指在大田环境下从事喷雾作业任务的自主作业装备,其关键技术包括精准导航、智能识别、智慧决策、作业路径规划和智能作业控制等。其主要技术难点是精准对靶作业、以及田间作业路径规划等问题。
从世界范围来看,美国、西欧、日本的智能施药技术和装备在国际上处于领先水平。美国John Deere公司采用分段控制技术避免重叠喷施、丹麦的HARDI公司使用田间地图,使用可调节的风幕来导向喷雾实现高精度的喷洒。在水田施药方面,日本的丸山、井关等公司的机具代表了当今国际最先进水平。航空施药方面,大疆、极飞等公司结合中国农业地形特点,针对多机型施药的载波相位差分技术(Real-Time Kinematic,RTK)精准导航、环境感知、动态变量喷施等技术取得了突破性进展,位于世界领先水平。
1.2 果园智能施药机器人发展现状
智能施药机器人在果园中的主要任务是自主稳定行走并精准作业,而果园多位于丘陵山地等崎岖地形,因此对移动过程中的施药机器人具有高要求。主要技术难点在于移动视角下的病虫害目标检测、机械臂作业精准控制以及机器人稳定行走设计等。
在果园植保方面,普遍采用风送喷雾[4]、定向仿形喷雾[5]等技术。美国和日本等国较早开始研究雾滴沉积分布规律、最佳粒径等对施药机器人施药效果问题,并用于指导施药技术和机具的创新,如对靶喷雾技术、静电喷雾技术、可控雾滴技术等。目前,欧美等国家的施药机器人多数已具备低容量施药和智能化水平。美国ESS公司将静电喷雾技术应用于果园施药,达到省水、省药、高效和喷雾的静电吸附效果。意大利的CAFFINI公司通过智能控制机械臂调整动作,适用于防治葡萄树等低矮果树。
1.3 设施农业智能施药机器人发展现状
设施农业施药机器人主要用于作业空间相对狭小的温室内,由于作业空间限制,设施施药机器人应该保证作业过程中器械不刮碰作物,其难点技术在于机械结构小而精的设计、机械臂的精准控制作业以及病虫害的精准识别等。
Li等[6]针对温室内施药空间狭窄的问题,提出了基于遗传算法的离线最优喷施算法,可以针对日光温室中不同种植模式的不同作物进行施药。Sammons等[7]研制的轨道式温室智能施药机器人,在喷雾装置上安装多个喷头,提高了施药机器人自主作业的效率。国内智能施药机器人研究相对较晚,且主要集中在科研院所,以试验性质为主。刘路[8]研发的小型施药机器人采用四轮式底盘,通过单目视觉进行识别和定位,实现了作物行间冠层下方的狭小空间施药作业。扬州大学张燕军等[9]研究了一种温室履带式智能施药机器人,采用模糊算法(Proportion Integral Differential,PID)控制策略,快速的导航纠偏能力保证机器人作业时的稳定性,满足篱架型黄瓜施药作业的高效化、无人化和智能化的需求。
2 智能施药机器人共性关键技术
2.1 智能施药机器人移动平台设计
移动平台稳定性设计是保证智能施药机器人田间作业的前提,按照作业空间可分为地面智能施药机器人和空中智能施药机器人。针对不同的田间作业场景,地面智能施药机器人移动平台主要分为轮式(图1a)、履带式(图1c)、足式、复合式,以及空中施药机器人移动平台。
2.1.1 轮式施药机器人移动平台
轮式施药机器人相对成熟,有单轮、双轮、多轮等形式。轮式底盘具有驱动和控制方式简单、负载能力大、作业效率高等优点,广泛应用于施药工作中。最常见的机构是三轮及四轮移动底盘。其中三轮的移动底盘相比于四轮具有更小的转向半径,更加灵活。而四轮底盘具有作业稳定性高、驱动及控制简单、质量轻等优点,因而常用于坡地等高低起伏的环境,以及温室、大棚等狭小作业环境中。针对作物不同种植行间距以及作物的不同高度问题,为此设计了高地隙底盘(图1b),其具有离地间隙高、轮距可调、喷幅宽等特点,可以满足在不同种植模式和作物类型的地块中施药的作业需求。高地隙底盘融合基于姿态测量的定位误差校正方法,可以补偿导航定位过程中因机体倾斜造成的位置测量误差,同时提高调头的准确性,实现了高地隙机械的智能化施药[10]。
2.1.2 履带式施药机器人移动平台
履带式底盘的接触面积大,附着能力强,并且履带与地面之间提供额外的摩擦系数,提供足够的移动摩擦力,使得履带式底盘具有较强的地形适应性,常用于温室大棚、丘陵山地、密植果园等复杂环境中。温室大棚作物的种植密度较大,作业行狭窄,因此施药机器人应采用小型履带式底盘,解决施药机器人在作业过程中对作业的挂碰,实现无损智能施药作业。由于密植果园中枝叶低矮稠密且地面杂草较多,导致地面湿滑,轮式等智能机器人行走困难,而自走式橡胶履带底盘具有前进动力强、行走稳定性高等优点,可以较好地满足果园施药作业要求(图1d)。智能施药机器人在丘陵山地作业时,地形高低起伏导致机器人作业困难,采用三角履带轮式结构设计,可增大底盘的通过性和稳定性,解决机器人平台在丘陵山地作业时存在的爬坡能力差、环境适应力差、作业效率低等问题[11]。
2.1.3 足式施药机器人移动平台
足式底盘设计是模仿自然界的生物行走方式,具有结构紧凑、越障方式灵活、适应能力强的优点。其中类蜘蛛仿生六足底盘机器人最为常见,为防止运动过程中刮碰地面,智能施药机器人通常设置超声波传感器采集运动过程中的底盘距离地面障碍物的距离信息[12]。Kawin等[13]研制了一种六足机器人(如图1e所示),可以在光滑和不规则的地形上自主导航,六条机械腿由电机驱动,在行走过程中,每次移动三条机械腿,因此留下的三条机械腿总是在地上形成三角形,减少了不稳定性,环境适应性强。施药机器人在作业过程中需要携带大型药箱增加单次作业时间,而足式底盘载重能力弱,且结构复杂难以控制,因此研究者对足式施药机器人的研究较少。
2.1.4 复合式施药机器人移动平台
地面施药机器人轮式底盘与履带式底盘应用最为广泛,但单一形式的底盘均存在缺点,例如履带式底盘能耗大、行动速度缓慢,轮式底盘越障能力弱、作业稳定性差。而复合式底盘施药机器人(图1f)融合多种底盘的结构特点,克服单一底盘的缺点,更好地适用于果园、温室、大田等复杂环境的施药工作。轮履式复合底盘同时具有履带式底盘越障能力强以及转向灵活的优势,更好地适用于果园、温室的施药作业需求[14]。同时轮足复合式施药机器人底盘可以解决高大树木的喷施难题,可以高效、精准地完成施药作业[15]。
2.1.5 空中施药机器人移动平台
无人机(Unmanned Aerial Vehiclev,UAV)在进行施药作业时,可生成作业路线图,实现自主变量喷施作业,同时不受作物生长模式和地形限制,大疆T30实测大田效率可以达到16 hm2/h,作业效率高,已被广泛应用于施药作业中。植保无人机近年来发展迅速,现有的产品种类众多(如图1g、1h所示)。针对丘陵、盆地等起伏多、坡度大的复杂地形,国内以深圳大疆、广州极飞、无锡汉和等为代表的无人机公司利用遥感技术增加了仿地飞行的功能,使得植保无人机施药更加均匀。为使无人机达到精准施药作业的要求,研究人员对雾滴沉积特性、覆盖度、雾滴穿透性的影响进行了试验研究,分析无人机在不同作业条件下的最佳作业参数[16-18]。

图1 典型施药机器人移动平台
2.2 喷雾装置
针对国内植保机械和施药技术落后的局面,研究者设计了智能施药机器人来实现自动对靶、变量喷雾、仿形喷雾等功能,达到精准探测按需喷施的要求,减少农药滥用造成的环境污染。本小节从大田、温室、果园等不同应用场景展开分析,总结了不同施药场景下的喷雾装置,主要包括可调节喷杆喷雾装置、静电喷雾装置、机械臂靶向喷雾装置、风送式喷雾装置、仿形喷雾装置等,如表1所示。
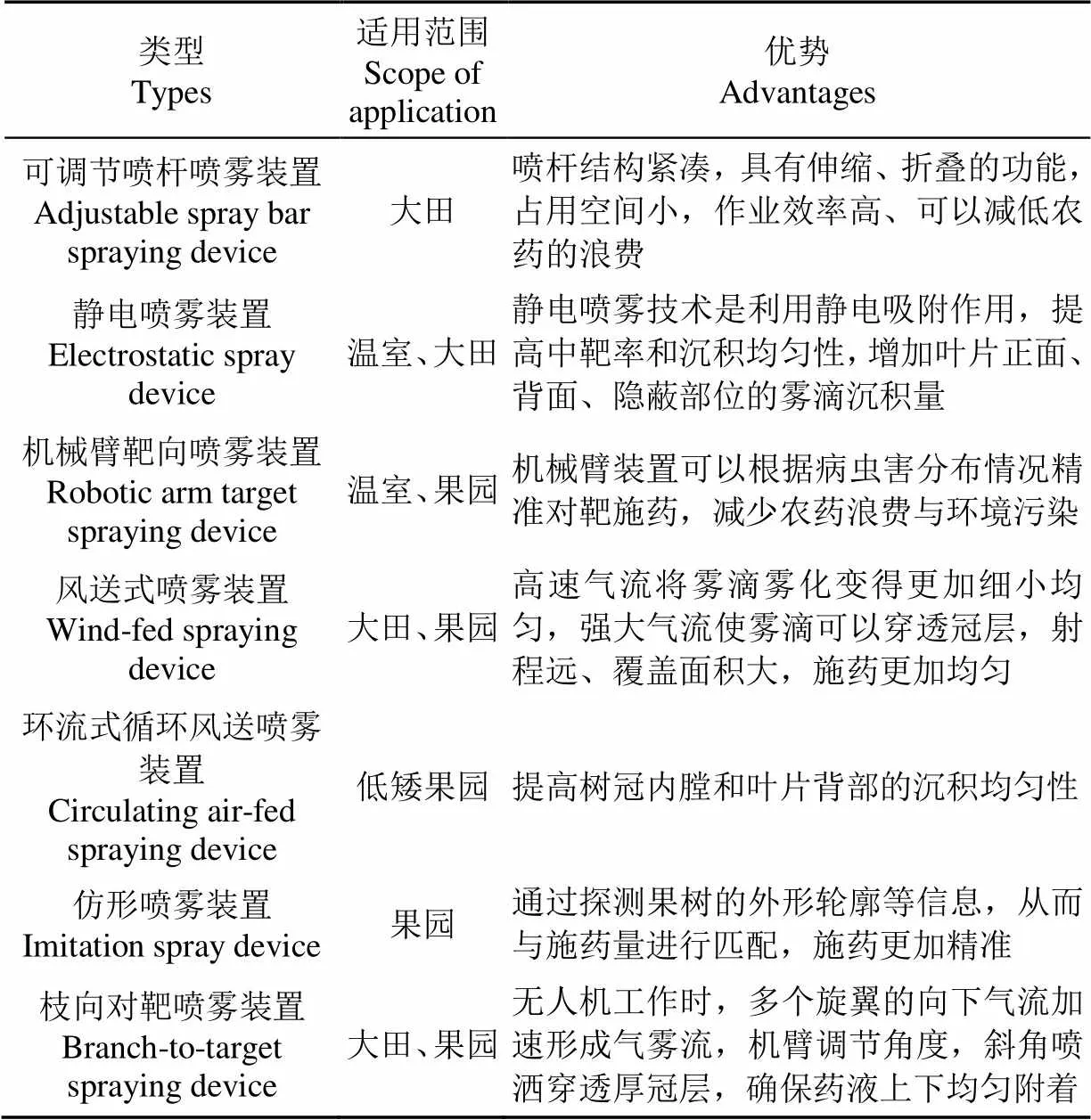
表1 关键喷雾装置
2.2.1 大田场景下的喷雾装置
在进行大田施药作业时,由于道路颠簸或车辆转弯造成地面施药机器人底盘震动,易导致农药喷洒不均匀,降低雾滴沉积量。而植保无人飞机易受环境风力的影响,为此研究人员在施药机器人上增加了静电喷雾装置。静电喷雾技术是通过感应式充电的方法使雾滴带有正负电荷,在目标作物之间产生静电场,使雾滴可以吸附在作物表面,提高中靶率,增加叶片背部的雾滴沉积量。例如在植保无人机上设计离心静电喷雾装置[19]或双极接触式静电喷雾装置[20],具有防飘移的作用,在竖直方向与水平方向的沉积均匀性能够显著提高。
在宽广平坦的地块中作业,施药机器人大喷辐的喷杆喷雾装置,将大大提高植保工作的效率,但对于不连续的地块,易产生农药的重复喷洒现象,造成农药的浪费,通过对喷杆的喷洒范围进行实时调节可以有效解决这一问题。北京市农林科学院智能装备技术研究中心研发了一款遥控对靶施药机器人,喷杆可以实现收缩和伸展,集卫星导航、路径规划、物联网监控等新型技术于一体,根据设定药量自动变量喷雾,显著提高施药效率。Gonzalez-de-Soto等[21]设计的施药机器人使用直喷喷杆式喷雾装置,通过机器视觉系统实时监测生成精确处方图,再传达指令给施药系统进行变量施药任务,显著减少了用药量。极飞R150农业无人车搭载气流喷雾系统,两侧的云台气流喷雾装置可以上下左右摇摆,高压风机将液体雾化成微米级颗粒,附着更加均匀,实现更加智能的喷雾作业。
2.2.2 温室场景下的喷雾装置
在温室中施药,若无法保证精准喷施到植物各部位,会增加温室内的湿度,加重病害的发生。为提高施药效果,对施药机器人采用风送喷雾装置,辅助气力导流装置从植株冠层中心点向四周冠层叶片施加辅助气流,迫使冠层叶片开始上下振动,控制喷头对四周冠层叶片喷施药液,达到全冠层叶片的精准高效施药作业[22]。然而风送气流喷雾会造成较多雾滴沉积在钢构、棚顶等设施结构表面的问题,通过多自由度机械臂配合电磁阀控制喷嘴流量,可以较好的实现施药机器人的局部变量喷雾[23],减少雾滴逸散。Hejazipoor等[24]设计的施药机器人采用多自由度机械臂作为喷雾装置,利用Kinect v. 1相机捕获的植物深度RGB图像,用于计算植物体积来控制施药量,在作业需要时,施药控制系统展开多自由度机械臂,实现狭小空间内的精准喷洒。针对大棚种植的爬架类瓜果的施药作业,设置双边双轨道四喷头机械臂,两边同时对病害区域进行重点施药,不仅能实现靶向喷药,还能提升施药效率[25],同时配备静电喷嘴,提高叶片背面的沉积率[26],可以改善喷雾沉积和作业效率。
2.2.3 果园场景下的喷雾装置
在果园的喷施作业环境中,果树的不同树高、树宽、冠层体积等都会影响果树的喷施效果。研究者提出通过仿形喷雾装置,利用传感器或机器学习技术获取树冠的形状、大小等信息,匹配施药量进行变量喷雾,从而提高果树的喷施效率。
施药过程中树叶层叠、树枝遮挡等问题导致病虫害防治效果不佳,而柔性机械臂可以很好的解决这一问题。多自由度对称式柔性仿形喷雾装置,通过优化喷雾点的运动学和动力学特性,获得最佳的作业区域,实现精准施药并减少对作物的伤害[27]。在分段常曲率假设的基础上,利用关节常曲率假设,建立机器人机械臂正反运动学模型,实时控制机械臂动作,使得机械臂可以避开树枝,伸入树冠内的病虫害区域[28]。机械臂末端执行器配备多光谱成像的集成疾病传感系统,则可自动检测病害的症状并且选择性喷洒病害树冠区域[29],实现精准喷施。
雾滴穿透性和药液覆盖率是果树防效的重要依据,果园施药机器人通过设计两排空气辅助隧道式喷雾,施药效果可以得到有效提高[30]。采用改进型离心风机,产生旋转气流,雾化农药流,辅助气流可搅动果树的叶子,将细小的雾滴送到靶标位置,提高农药的附着率[31]。新型隧道对流式风送施药方法,通过叶轮与风道引导气流循环往复在冠内多维流动,形成对果树的隧道对流式风送。改善了现代篱架型果树冠层面临农药“穿不透、用量大、飘移多”等瓶颈问题[32]。
2.3 导航技术
施药机器人利用自动导航技术可以在复杂的环境中避开障碍物寻找从起始位置到目标位置的最佳路径。现在最常用的导航方式有全球定位系统(Global Positioning System,GPS)导航、视觉导航、激光雷达(Laser Radar,Lidar)导航、组合式导航等,如表2所示。

表2 导航技术总结
2.3.1 GPS导航
GPS导航是智能机器人导航中使用最广泛的方法之一。使用GPS定位时,由于树木等障碍物的遮挡会导致通信障碍或者卫星定位丢失,其受环境因素影响较大,为了在农田中定位机器人,采用RTK技术可以提高GPS位置测量精度。在作物行间行驶,通常需要RTK-GPS接收器来计算差分校正,当地理空间位置信息和处方图被输入数据采集系统时,根据作物预定处理信息打开和关闭喷头,进行变量施药[33]。
2.3.2 传感器导航
常用的导航传感器有光学传感器和超声波传感器。基于光学感知原理,施药机器人采用红外传感器或激光传感器准确检测导轨所处的位置,使机器人能够沿着温室中的轨道来回行驶,以实现对温室植物的自主施药[34]。导航系统利用超声波测距传感器提供的信息在作物行间导航,同时基于超声感知靶标位置,使得机器人实现对靶喷雾。Mosalanejad等[35]在3个不同的速度下进行测试,施药机器人均可成功地导航至指定路径,在不同速度下,机器人单元运动精度的均方根误差在5.22和6.38之间。
2.3.3 视觉导航
视觉导航技术利用视觉传感器获取图像信息,通过视觉导航算法处理图像,最终得到导航路径,常用的视觉传感器有单目相机、双目相机和深度相机。相较于GPS导航,视觉导航具有更好的灵活性、成本低等优点。常见的单目视觉导航具有位置与姿态信息不完整、果树定位精度低的问题,利用神经网络强大的特征提取能力,实例分割作业场景,可以将偏航角、横向位移以及果树位置的误差减小[36]。果园的作业环境复杂,视觉导航系统易被环境干扰,利用基于UNet网络的果园视觉导航路径识别方法,受光照影响较小,平均距离误差可以得到有效减小[37]。单目相机成本低,分辨率高,但难以获得图像深度信息,双目相机以低成本和高分辨率获得深度信息,但是在缺乏纹理差异的环境中很难获取有效信息。基于双目立体视觉的聚类识别算法,保证了良好的实时性,最初自适应视觉导航算法是为农业机器人自动导航而设计的,如今可以扩展到农业物联网系统[38]。深度相机可以获得2D RGB图像和拍摄场景中物体的深度信息,在检测并识别障碍物目标后,可以获取行驶路径,实现行间施药机器人的自主避障。
2.3.4 激光雷达导航
激光雷达可分为单线激光雷达和多线激光雷达。多线激光雷达可同时发射和接收多束激光,因此可以识别出被测物体的高度信息并获取周围环境的3D扫描图,同时这也意味着多线激光雷达每一时刻的数据处理量较大,造成数据采集和处理时间均大于单线激光雷达;而单线激光雷达仅仅进行平面扫描,不能测量出物体的高度,但其扫描速度快且价格便宜。
使用单线激光雷达采集田间点云数据,能够提取出有效信息并构建局部坐标系,获取障碍物与移动机器人之间的位置关系[39]。使用16线激光雷达采集机器人运动方向上的三维点云数据,通过研究作物叶片与主干点云地面投影的分布规律来进行导航[40]。将毫米波雷达传感器应用在四旋翼植保无人机上,在坡地等复杂地形下实现了仿地飞行功能,更加安全的实现精准喷施,达到更好的防治效果[41]。激光雷达应用在设施农业中时,喷雾机器人前后安装两台二维激光雷达同步获取数据,实时调整行驶路线及自身姿态,使喷雾机器人与植株之间保持一定的安全距离和喷雾距离,同时能够实现作业过程中的避障功能[42]。采用前后倒挂式安装二维激光雷达的方式,可以增加扫描区域,降低扫描的盲区,提升施药机器人的建图效率[43]。
2.3.5 组合式导航
融合多种导航方式,解决单一导航的缺点,可以获得高精度的定位导航。GPS导航是机器人导航中使用最广泛的方法之一,结合RTK技术有着不错的导航性能,但是单一的GPS导航并不能满足复杂作业环境下的导航定位需求。
多传感器融合的自主施药机器人导航方法可以获取更丰富的环境信息,实现更精确、高效的导航。机器人的导航系统配备RTK-GPS导航系统、超声波传感器和激光扫描仪,以精准确定车辆的位置和姿态,用于自主执行指定的轨迹并避开障碍物[44]。利用视觉传感器和超声波传感器可以测量整行植物的边缘,感应式接近传感器可以提供机器人到路径边缘以及转向的位置信息,识别机器人与植物之间的位置关系,发送转向、行走命令来控制移动平台[45],实现精准导航。利用卡尔曼滤波融合里程计和视觉传感器的控制系统,可以减小车辆横向位置控制的均方根误差[46]。利用GPS和机器视觉获取行驶信息以及导航基准线,以此获得作物行特征的点,此种多传感器融合的方式有效提高了导航系统的定位精度和鲁棒性[47]。Iqbal等[48]提出了一种在被遮挡的作物行中导航的策略,采用GPS航路点跟踪和基于Lidar的导航的合导航方式,在创建的试验台中表现良好。植保无人机的自主避障多采用毫米波雷达与双目视觉融合的方法,可以有效提高无人机避障的稳定性以及导航精度[49]。
2.4 智能识别
精准喷施是提高农药利用率的有效手段,而目标的精准识别检测是实现精准喷施的首要前提。在施药过程中,目标检测系统可以实时获取目标的类别和位置,使喷头根据作物类别、位置、大小、体积、病虫害情况等信息调整施药量进行精准变量施药。但目标检测对于施药机器人来说是一项具有挑战性的任务,田间作业环境复杂,如光线、风等不可预测的环境条件,对施药机器人的识别性能会造成影响,算法识别时间、系统通信时间以及喷雾装置响应速度等都会影响施药的准确性,因此选择合适的技术进行目标检测,是智能施药机器人进行精准变量施药的关键环节。
目前,施药机器人最常用的目标检测技术包括红外线传感检测法、超声波传感检测法、激光雷达检测法、机器视觉检测法,光谱成像检测法、以及多传感器融合的检测方法。本节针对目前各种智能施药机器人的探测方法进行了评价。
2.4.1 红外线传感检测
红外传感检测通过红外发光管发出的红外光照射到目标作物后进行反射,接收器接收红外光以确定目标位置。由于其可靠性好、响应速度快、成本低,被广泛应用于农作物实时检测中。在使用红外探测技术的过程中,叶片的覆盖度和光照强度会影响探测距离[50],因此红外传感检测只能实现近距离探测。
2.4.2 超声波传感检测
超声波检测是利用超声波发射器发射超声波,当超声波遇到障碍物时便会返回,计算发射超声波到收到反射波的时间,再利用此时间差和速度计算距离。超声波检测技术对目标的检测距离更远,且复杂性远低于红外线探测技术,随着超声波传感器的精度与响应速度的提高,超声波传感器被逐步应用在施药机器人的智能识别系统中。即便采用低成本的超声波检测系统,智能识别作物也具有可行性和较高的准确性[51]。
使用超声波传感器进行果树冠层探测时,通常将超声波传感器依次安装在不同高度的位置上,对果树树冠的上、中、下三段不同高度进行探测,采集果树不同冠层的信息,估算出树冠的大小后通过控制系统来调整农药的施用量,实现树冠上中下部的变量喷施,从而减少不同冠层的农药施用量[52]。
2.4.3 激光雷达检测
激光雷达是通过发射器向周围散射强烈的激光脉冲,根据光束反射回来的时间,计算距周围物体各点的距离,使用激光雷达可以同时满足机器人定位的速度和精度要求。Liu等[53]比较了超声波、红外和激光3种传感器的性能之后,证明激光雷达可以提供高精度、高频率的检测信息。
激光雷达受环境影响相对较小,识别精度高,可以获取果树的形状、体积、叶面积等信息,近年来研究者对于激光雷达进行智能识别的应用增多。利用16线激光雷达可以准确获得作物的株高[54],但果园施药机器人的目标检测系统仅识别株高不能满足精准变量喷施的效果,通过探测果树的更多特征信息,如树冠体积、叶面积等特征信息,才能实现更好的施药效果。基于二维激光雷达扫描仪获取Lidar 3D动态测量果树的几何表征信息,得到树行体积和叶面积密度之间的关系,估计出作物的叶面积[55]。但使用激光雷达获取树冠信息,其对从激光雷达到树中心的距离的误差非常敏感,需要额外的技术来控制纠正这些误差[56]。使用激光雷达技术进行精准喷施作业时,施药机器人对目标的喷雾响应时间以及喷雾时间往往决定了喷施效果。为解决自动对靶喷雾中的延时喷雾问题,袁鹏成等[57]采用地速传感器获得施药机器人的实时速度,构建自适应延时喷雾模型,设计精准喷施控制系统改善了喷雾时间问题。
2.4.4 机器视觉检测
机器视觉是通过图像传感器获取大量靶标RGB图像后,再利用图像预处理以及数据增强技术扩增图像数据集,以防止模型出现过拟合现象,将得到的图像输入至机器视觉模型中,进行模型训练,通过一系列调参优化,得到一个可用于实时检测目标的网络模型。
随着机器视觉技术的快速发展,其在农业智能识别领域已得到广泛应用,是智能施药机器人精准喷施系统的必备技术。Malneršič等[58]采用Sobel滤波方法进行边缘检测,通过erosion算法去除异常粒子,能快速检测出作物存在的位置,实现近距离精准喷施。利用颜色特征以及形态腐蚀和膨胀算法,在多云或晴天下从杂草和土壤中分割出图像中的作物区域,使用HSV颜色空间来区分作物、杂草和背景,通过在最小和最大阈值之间过滤每个HSV通道来定义ROI,然后通过使用形态腐蚀和膨胀过程进一步细化该区域,有效提高了作物与杂草的识别精度[59]。Ge等[60]基于双目立体视觉和高斯混合模型,识别结果优于K-means和Fuzzy c-means。丁为民等[61]采用最小二乘法和五点参数标定法得到树冠面积与体积的关系模型,实现果树树冠体积测量,模型预测树冠体积的平均误差分别为13.73%和10.18%。通过SVM图像分类器自动检测[62],或利用SVM与Adaboost分类器实现病害的自动识别[63],通过识别结果预测施药量并喷洒农药,实现病虫害的精准变量喷施。基于机器视觉技术建立的害虫自动识别和实时智能决策软件系统,能够为智能施药机器人的精准喷施系统提供支持[64]。
深度学习是机器学习的一个重要分支,通过大规模数据集的学习,自动、高效、准确地识别目标的特征,替代了传统获取图像特征信息的方式。因此,深度学习技术应用于农作物病虫草害识别将是精准农业未来发展的必然趋势[65]。将使用深度学习技术进行农作物病虫害识别的近年研究整理如表3。利用深度学习技术进行目标识别,需要对算法模型不断进行调参优化,并且需要进行算法改进,使模型能够更好的提取目标特征,来达到更好的识别效果。孙俊等[71]针对传统Alex Net模型参数大、特征尺度单一的问题,设计了一种空洞卷积与全局池化相结合的多尺度特征融合卷积神经网络识别模型,模型对幼苗的识别准确率可达90%以上,但在恶劣、黑暗的背景下幼苗识别率较低,因此机器视觉对复杂背景下的识别性能还需要提升。
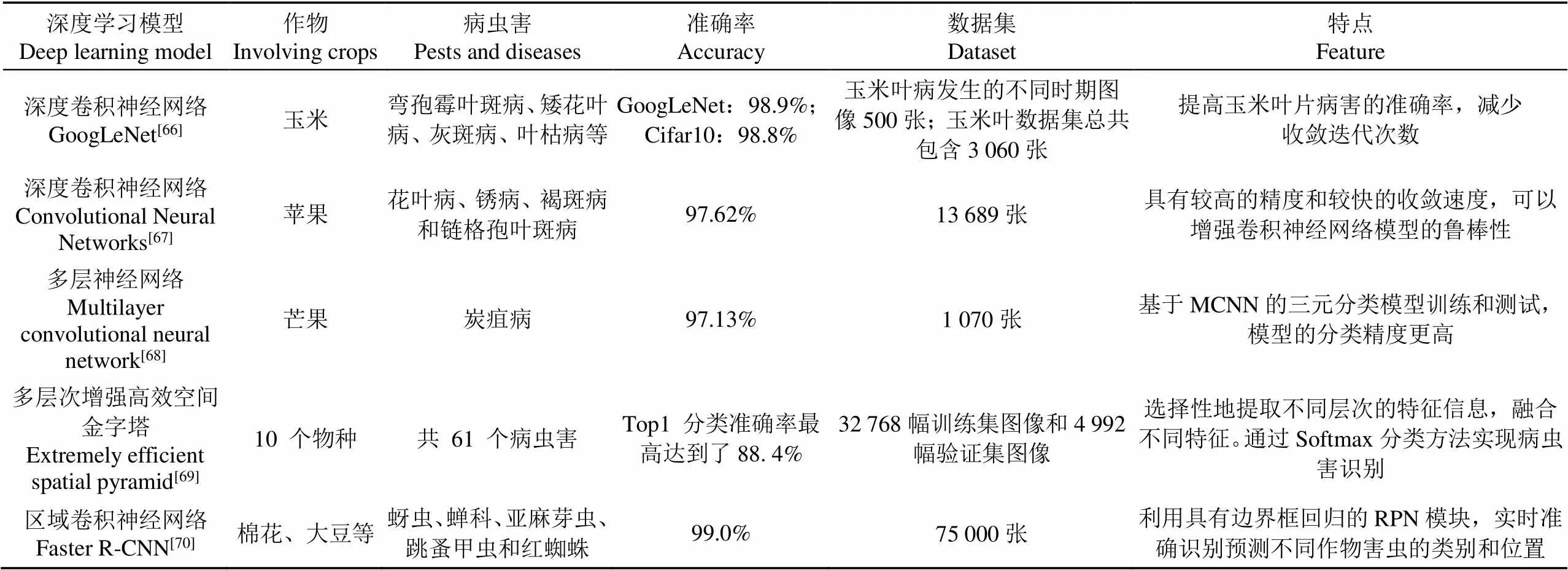
表3 深度学习用于农作物病虫害识别
2.4.5 光谱成像检测
传统病虫害识别方法主要依靠专家或农民自己来诊断病虫害,然而,这种方法需要较高的成本和时间损耗,并且难以识别早期病虫害,由于依靠人为识别,结果往往缺乏科学性。利用光谱成像技术进行早期检测和量化病害程度,从大量植被指数提供的一个广泛数据库中分析出检测和量化的最佳拟合指数,可用于决策支持和实施精准作物保护技术以控制病虫害[72],从而解决病虫害识别时效性以及缺乏科学性的问题。
基于光谱信息的病虫害检测,依赖从冠层中产生的光与植物组织相互作用后的特性,即反射、透射和吸收,用来估算病害水平、郁闭度和绿叶面积等。何宽等[73]利用高光谱成像技术对轻微腐烂病害蓝莓、果蝇虫害蓝莓进行无损检测,具有较高的识别精度。利用多光谱反射来检测健康作物中的病斑,主要是通过区分病害和健康植株的波段或波段组合[74]。智能施药机器人利用多光谱成像技术识别病虫害,通过训练不同视角的病虫害图像,增加检测灵敏度,特别是对于具有早、中期症状的检测灵敏度将显著提高[75]。
2.4.6 组合式检测
在实际生产中,光谱设备价格昂贵,普通种植人员不易接受,并且受环境影响较大,不宜推广,而机器视觉则不同,其识别速度快,更精准,且应用成本低,使得机器视觉技术越来越受到研究者的关注。在病虫害检测中,机器视觉技术虽然成本较低,但是机器视觉技术过多的依赖模型对目标特征的提取,经过多次调参优化才能得到一个适合与该病虫害检测的视觉模型。研究发现高光谱成像技术结合机器学习方法,可以提高对病虫害检测的识别准确率,例如吴叶兰等[76]结合高光谱成像技术和机器学习方法对柑橘病叶进行分类。邓小玲等[77]通过无人机搭载高光谱,利用遥感技术提取特征波段,建立深度学习模型进行分类,检测出柑橘患病的植株。利用多种技术结合进行智能识别工作,会大大提高识别性能,更有利于智能喷施机器人的精准喷施工作。
3 结论与展望
随着中国人口老龄化持续加速,同时,环境污染及农产品安全问题日益明显,智能施药机器人在实现农业的生态可持续化发展中具有重要的应用价值。目前,研究学者已经在智能施药机器人方面进行了大量的研究并取得了许多成果,逐步形成了较为完善的设计成果,但是对于一些关键技术的研究仍存在以下的问题,需要进一步研究:
1)实时执行任务。在实际农业作业环境中由于作业地形、转向控制、导航偏离等外部环境发生改变时,就很难保证任务执行效果,所以精准、快速的得到实时数据和信息进行任务的实时执行研究尤为重要。响应速度是智能施药机器人喷雾技术的关键。当前研究的智能施药机器人,施药时存在响应延时的情况,不能对田间作业时发生的各类动态变化信息及时做出处理,导致智能施药的效果并不理想。对目标信息的获取过程中,会出现延时获取的现象,这将导致系统不能准确识别到目标,从而导致漏检漏喷现象。在导航系统中,响应延时将导致机器人不能准确避开障碍物,甚至使得机器人出现导航方向错误的问题。因此,需要尽可能提高施药机器人导航和检测的响应速度,解决通信问题,采用可靠性更高、响应速度更快的检测装置和控制装置,用以减少检测和控制的时间。运用深度学习进行病虫害的检测,可以实现实时且精准的施药,但是复杂的网络结构和庞大的数据样本是深度学习的难点,没有大量的数据集进行模型训练,深度学习检测的性能也会被限制。比如对于不同症状的病虫害在视觉上非常相似,模型可能无法提取更全面的特征信息进行区分,需要利用地理位置、气候环境、作物发育阶段和历史病虫害发病率数据等多种信息源来增加图像数据集,用以增加模型的鲁棒性和准确性。因此缺乏标准注释的图像数据集是应用深度学习系统的主要障碍。
2)提高探测精度。由于大田环境道路崎岖不平,车辆行驶过程中无法避免的会发生颠簸、车身发生震动等现象,这些因素将会影响传感器以及深度学习模型的探测精度,从而造成自主导航、目标检测误差增大。需要进一步通过研究多传感器融合技术、障碍探测技术、图像处理方法、路径优化方式、配备纠偏原件、故障诊断模块等来提高导航以及目标识别的准确性。
3)优化设计轻量化底盘。施药机器人需要承载大容量的药箱,以增加单次作业面积,还要安装各种传感器等部件,因此底盘需要具有一定的承载能力,而田间作业环境复杂,在越障和跨越沟渠方面仍然有一定的限制性,大大降低了智能施药机器人的作业性能。因此要尽可能的开发轻量化底盘,以减少整机质量,更灵巧、安全、稳定的执行作业。选择对比不同材料以实现轻量化设计,进而降低作业机组能耗,设计合理的整机结构,使机身的行走姿态保持水平,提高行走平稳性、负载稳定性。
4)降低施药机器人研发成本。在进行机器人底盘设计时,不仅要考虑到控制精度、灵活性、工作环境等方面,还要考虑到材料、价格、环保等方面,以适应现代社会的发展需要。大田环境复杂,如土壤、植被、道路、杂草等复杂背景,以及光线、温度、湿度等天气变化对于目标检测、自主导航都会产生干扰,激光雷达相对于其他传感器识别更精准,但其价格昂贵,导致施药机器人的成本增加,增加了农业的生产成本。因此施药机器人在满足智能化要求的同时,还需降低研发成本。
5)设计多场景应用的喷雾装置。喷雾机构的设计相对比较成熟,专家学者针对不同种类的作物、不同的种植模式、不同的地理条件等设计了喷雾装置。果园施药对于喷雾装置需要考虑对于风量、风速的控制,树冠的适应、变量喷雾的控制,实现风送、仿形、变量的功能,病虫害大多隐藏在枝叶密集的地方,这就需要喷雾装置具有较好的穿透性,同时机械臂的设计应具有柔性、灵活性,以实现对靶喷施。但是,现有的研究大多只是符合当地种植的树形特征。因此设计可调节的喷雾装置、优化喷雾装置参数是解决作物品种差异性、地域差异性、生长模式差异性等问题的关键技术。
6)融合多传感器的集成技术。导航与智能识别是智能施药的重要技术,多传感器融合互补各类单一传感器的优缺点,获取更多有效的信息,有效解决单一传感器定位时的不稳定性和识别时的误差,更加全面的辨识路面障碍物与作物病虫害,继而实现精准导航、智能识别。
7)发展地空一体化、施药机器人集群化作业。采取地面施药机器人与植保无人机协同作业的方式,立体化果园施药作业,使雾滴分布更加均匀。探究最优施药参数,减少作物施药不均匀及药液流失的情况,解决密闭果园施药时无法均匀覆盖果树各个冠层的问题。多类型智能施药机器人协同工作,提高机器人的整体智能化水平和工作效率。
[1] 黄文江,刘林毅,董莹莹,等. 基于遥感技术的作物病虫害监测研究进展[J]. 农业工程技术,2018,38(9):39-45.
[2] 苏琴. 化学防治与生物防治的优缺点浅析[J]. 内蒙古农业科技,2011(6):84-85, 132.
[3] 孔祥智. 守住底线做好三项重点工作:2022年中央一号文件解读[J]. 乡村振兴,2022(4):52-55.
[4] Qiu W, Zhao S Q, Ding W M, et al. Effects of fan speed on spray deposition and drift for targetingair-assisted sprayer in pear orchard[J]. International Journal of Agricultural and Biological Engineering, 2016, 9(4): 53-62
[5] Baltazar A R, Santos F N, Moreira A P, et al. Smarter robotic sprayer system for precision agriculture[J]. Electronics, 2021, 10(17): 2061.
[6] Li Y, Yuan J, Liu X, et al. Spraying strategy optimization with genetic algorithm for autonomous air-assisted sprayer in Chinese heliogreenhouses[J]. Computers and Electronics in Agriculture, 2019, 156: 84-95.
[7] Sammons P J, Furukawa T, Bulgin A. Autonomous pesticide spraying robot for use in a greenhouse[C]//Australian Conference on Robotics and Automation. Canberra, Australia: Commonwealth Scientific and Industrial Research Organisation, 2005.
[8] 刘路. 大田环境下智能移动喷药机器人系统研究[D]. 合肥:中国科学技术大学,2016.
Liu Lu. Research on Intelligent Mobile Spray Robotic System for Field Crops[D]. Hefei: University of Science and Technology of China, 2016. (in Chinese with English abstract)
[9] 张燕军,杨天,徐勇,等. 温室履带式智能施药机器人设计与试验[J]. 农机化研究,2022,44(8):97-104.
Zhang Yanjun, Yang Tian, Xu Yong, et al. Design and experiment of greenhouse tracked intelligent pesticide application robot[J]. Journal of Agricultural Mechanization Research, 2022, 44(8): 97-104. (in Chinese with English abstract)
[10] 印祥,安家豪,王艳鑫,等. 高地隙施药机自动驾驶系统研制与试验[J]. 农业工程学报,2021,37(9):22-30.
Yin Xiang, An Jiahao, Wang Yanxin, et al. Development and experiments of the autonomous driving system for high-clearance spraying machines[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(9): 22-30. (in Chinese with English abstract)
[11] 王锋,杨玲,谢守勇,等. 一种三角履带式果园动力底盘的设计与研究[J]. 农机化研究,2019,41(5):91-96.
Wang Feng, Yang Ling, Xie Shougyong, et al. Design and experiment of handheld citrus shoots removing machine[J]. Journal of Agricultural Mechanization Research, 2019, 41(5): 91-96. (in Chinese with English abstract)
[12] 张勇,刘至洋,于明静. 基于传感网络的果蔬精量施药机器人系统设计[J]. 无线互联科技,2022,19(13):111-113.
Zhang Yong, Liu Zhiyang, Yu Mingjing. Design of fruit and vegetable precision pesticide application robot system based on sensor network[J]. Wireless Internet Technology, 2022, 19(13): 111-113. (in Chinese with English abstract)
[13] Kawin N, Karthi N, Saravanampatti C. Six legged semi-auomatic machine for agricultural seeding and spraying[J]. Gradiva Review Journal,2022,8(6):380-386.
[14] 陶春鸣. 水田履带轮式施药机设计与底盘试验[D]. 镇江:江苏大学,2019.
Tao Chunming. Design of Paddy Field Pedrail Wheeled Sprayer and Chassis Test[D]. Zhenjiang: Jiangsu University, 2019. (in Chinese with English abstract)
[15] Suparat N, Maneewarn T. Spraying analysis for a coconut climbing robot[C]//2015 7th International Conference on Information Technology and Electrical Engineering (ICITEE). IEEE, Chiang Mai, Thailand, 2015: 388-393.
[16] Wang G, Lan Y, Qi H, et al. Field evaluation of an unmanned aerial vehicle (UAV) sprayer: Effect of spray volume on deposition and the control of pests and disease in wheat[J]. Pest Management Science, 2019, 75(6): 1546-1555.
[17] Wang J, Lan Y, Zhang H, et al. Drift and deposition of pesticide applied by UAV on pineapple plants under different meteorological conditions[J]. International Journal of Agricultural and Biological Engineering, 2018, 11(6): 5-12.
[18] Meng Y, Su J, Song J, et al. Experimental evaluation of UAV spraying for peach trees of different shapes: Effects of operational parameters on droplet distribution[J]. Computers and Electronics in Agriculture, 2020, 170: 105282.
[19] Zang Y, Lian Q, Zang Wei. Design and test of a six-rotor unmanned aerial vehicle (UAV) electrostatic spraying system for crop protection[J]. International Journal of Agricultural and Biological Engineering, 2017, 10(6): 68-76
[20] 蔡彦伦. 低空无人机接触式静电喷雾系统设计与试验[D]. 镇江:江苏大学,2017.
Cai Yanlun. Designand Test of Contact Electrostatic Spray System for Low-altitude UAV[D]. Zhenjiang: Jiangsu University, 2017. (in Chinese with English abstract)
[21] Gonzalez-de-Soto M, Emmi L, Perez-Ruiz M, et al. Autonomous systems for precise spraying–evaluation of a robotised patch sprayer[J]. Biosystems Engineering, 2016, 146: 165-182.
[22] 吴硕,王荣锴,刘继展. 一种温室草莓冠层内圆周风送施药机器人及其实现方法:CN111436414B[P]. 2021-11-23.
[23] 张俊雄,曹峥勇,耿长兴,等. 温室精准对靶喷雾机器人研制[J]. 农业工程学报,2009,25(增刊2):70-73.
Zhang Junxiong, Cao Zhengyong, Geng Changxing, et al. Research on precision target spray robot in greenhouse[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25(Supp.2): 70-73.
[24] Hejazipoor H, Massah J, Soryani M, et al. An intelligent spraying robot based on plant bulk volume[J]. Computers and Electronics in Agriculture, 2021, 180: 105859.
[25] 林德颖. 瓜果自动施药机器人系统的研究与设计[J]. 农业技术与装备,2020(9):125-127.
Lin Deying. Research and design of melon and fruit automatic dispensing robot system[J]. Agricultural Technology & Equipment, 2020(9): 125-127. (in Chinese with English abstract)
[26] Yamane S, Miyazaki M. Study on electrostatic pesticide spraying system for low-concentration, high-volume applications[J]. Japan Agricultural Research Quarterly, 2017, 51(1): 11-16.
[27] Vatavuk I, Vasiljević G, Kovačić Z. Task space model predictive control for vineyard spraying with a mobile manipulator[J]. Agriculture, 2022, 12(3): 381.
[28] Bao X, Niu Y, Li Y, et al. Design and kinematic analysis of cable-driven target spray robot for citrus orchards[J]. Applied Sciences, 2022, 12(18): 9379.
[29] Oberti R, Marchi M, Tirelli P, et al. Selective spraying of grapevines for disease control using a modular agricultural robot[J]. Biosystems Engineering, 2016, 146: 203-215.
[30] Pergher G, Gubiani R, Cividino S R S, et al. Assessment of spray deposition and recycling rate in the vineyard from a new type of air-assisted tunnel sprayer[J]. Crop Protection, 2013, 45: 6-14.
[31] Gao C, Qi L, Wu Y, et al. Design and testing of a self-propelled air-blowing greenhouse sprayer[C]//2017 ASABE Annual International Meeting. American Society of Agricultural and Biological Engineers, St. Joseph, Michigan,2017: 1.
[32] Wen Z, Qiu W, Zhang Z, et al. Tunnel-convective air-assisted spraying technology for improving droplet deposition on hedgerow vines[J]. International Journal of Agricultural and Biological Engineering, 2021, 14(6): 9-18.
[33] Pérez-Ruiz M, Agüera J, Gil J A, et al. Optimization of agrochemical application in olive groves based on positioning sensor[J]. Precision Agriculture, 2011, 12(4): 564-575.
[34] Nakao N, Suzuki H, Kitajima T, et al. Path planning and traveling control for pesticide-spraying robot in greenhouse[J]. Journal of Signal Processing, 2017, 21(4): 175-178.
[35] Mosalanejad H, Minaei S, Borghei A, et al. Evaluation of navigation system of a robot designed for greenhouse spraying[J]. International Journal on Smart Sensing and Intelligent Systems, 2020, 13(1): 1-12.
[36] 毕松,王宇豪. 果园机器人视觉导航行间位姿估计与果树目标定位方法[J]. 农业机械学报,2021,52(8):16-26, 39.
Bi Song, Wang Yuhao. Inter-line pose estimation and fruit tree location method for orchard robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(8): 16-26, 39. (in Chinese with English abstract)
[37] 韩振浩,李佳,苑严伟,等. 基于U-Net网络的果园视觉导航路径识别方法[J]. 农业机械学报,2021,52(1):30-39.
Han Zhenjie, Li Jia, Yuan Yanwei, et al. Path recognition of orchard visual navigation based on U-Net[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(1): 30-39. (in Chinese with English abstract)
[38] Xiang R, Jiang H, Ying Y. Recognition of clustered tomatoes based on binocular stereo vision[J]. Comput. Electron. Agric. 2014, 106: 75–90.
[39] 高观光. 基于激光雷达的智能自走式热雾机自主导航系统控制方法研究[D]. 合肥:安徽农业大学,2020.
Gao Guanguang. Study on the Control Method of Autonomous Navigation System of Intelligent Self-Propelled Hot Fog Machine Based on Lidar[D]. Hefei: Anhui Agricultural University, 2019. (in Chinese with English abstract)
[40] 刘路,潘艳娟,陈志健,等. 高遮挡环境下玉米植保机器人作物行间导航研究[J]. 农业机械学报,2020,51(10):11-17.
Liu Lu, Pan Yanjuan, Chen Zhijian, et al. Inter-rows navigation method for corn crop protection vehicles under high occlusion environment[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(10): 11-17. (in Chinese with English abstract)
[41] 孙学超. 基于毫米波雷达的植保无人机仿地飞行技术研究[D]. 杭州:杭州电子科技大学,2018.
Sun Xuechao. Research on Terrain Following Technology of Plant Protection UAV Based on Millimeter Wave Radar[D]. Hangzho:Hangzhou Dianzi University, 2018. (in Chinese with English abstract)
[42] 刘慧,段云鹏,张世义,等. 一种温室自主精准变量风送喷雾机器人结构及规划路径方法:CN113341961A[P]. 2021-09-03.
[43] 蒲文洋. 基于前后激光雷达的温室机器人导航系统设计与试验[D]. 淄博:山东农业大学,2021.
Pu Wenyang. Design and Experiment of Greenhouse Robot Navigation System Based on Front and Rearlidar[D]. Zibo: Shandong Agricultural University, 2021. (in Chinese with English abstract)
[44] Cantelli L, Bonaccorso F, Longo D, et al. A small versatile electrical robot for autonomous spraying in agriculture[J]. AgriEngineering, 2019, 1(3): 391-402.
[45] Chang C, Li Y, Lee J M. Localization of a rail robot in greenhouse based on multi-sensors[J]. 제어로봇시스템학회국내학술대회논문집, 2010: 228-232.
[46] Marchant J A, Hague T, Tillett N D. Row-following accuracy of an autonomous vision-guided agricultural vehicle[J]. Computers and Electronics in Agriculture, 1997, 16(2): 165-175.
[47] 陈艳,张漫,马文强,等. 基于GPS和机器视觉的组合导航定位方法[J]. 农业工程学报,2011,27(3):126-130.
Chen Yan, Zhang Man, Ma Wenqiang, et al. Positioning method of integrated navigation based on GPS and machine vision[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(3): 126-130. (in Chinese with English abstract)
[48] Iqbal J, Xu R, Sun S, et al. Simulation of an autonomous mobile robot for LiDAR-based in-field phenotyping and navigation[J]. Robotics, 2020, 9(2): 46.
[49] 刘立臣. 基于毫米波雷达和视觉的旋翼植保无人机自主避障研究[D]. 哈尔滨:东北林业大学,2020.
Liu Lichen. Research on Autonomous Obstacle Avoidance of Rotor Plant Protection UAV Based on Millimeter Wave Radar and Vision[D]. Harbin: Northeast Forestry University, 2020. (in Chinese with English abstract)
[50] 李丽,李恒,何雄奎,等.红外靶标自动探测器的研制及试验[J]. 农业工程学报,2012,28(12):159-163.
Li Li, Li Heng, He Xiongkui, et al. Development and experiment of automatic detection device for infrared target[J]. Transactions of the Chinese Society of Agricultural Engineering, 2012,28(12):159-163. (in Chinese with English abstract)
[51] Páez F C, Rincón V J, Sánchez-Hermosilla J, et al. Implementation of a low-cost crop detection prototype for selective spraying in greenhouses[J]. Precision Agriculture, 2017, 18(6): 1011-1023.
[52] Maghsoudi H, Minaei S, Ghobadian B, et al. Ultrasonic sensing of pistachio canopy for low-volume precision spraying[J]. Computers and Electronics in Agriculture, 2015, 112: 149-160.
[53] Liu T, Zhang W, Gu J, et al. A Laser Radar based mobile robot localization method[C]//2013 IEEE International Conference on Robotics and Biomimetics (ROBIO). IEEE, 2013: 2511-2514.
[54] 乔白羽,何雄奎,王志翀,等. 基于LiDAR扫描的高地隙宽幅喷雾机变量施药系统研制[J]. 农业工程学报,2020,36(14):89-95.
Qiao Baiyu, He Xiongkui, Wang Zhichong, et al. Development of variable-rate spraying system for high clearance wide boom sprayer based on LiDAR scanning[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(14): 89-95. (in Chinese with English abstract)
[55] Sanz R, Rosell J R, Llorens J, et al. Relationship between tree row LIDAR-volume and leaf area density for fruit orchards and vineyards obtained with a LIDAR 3D Dynamic Measurement System[J]. Agricultural and Forest Meteorology, 2013, 171: 153-162.
[56] Palleja T, Tresanchez M, Teixido M, et al. Sensitivity of tree volume measurement to trajectory errors from a terrestrial LIDAR scanner[J]. Agricultural and Forest Meteorology, 2010, 150(11): 1420-1427.
[57] 袁鹏成,李秋洁,邓贤,等. 基于LiDAR的对靶喷雾实时控制系统设计与试验[J]. 农业机械学报,2020,51(S1):273-280.
Yuan Pengcheng, Li Qiujie, Deng Xian, et al. Design and experiment of real-time control system for target spraying based on LiDAR[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(S1): 273-280. (in Chinese with English abstract)
[58] Malneršič A, Dular M, Širok B, et al. Close-range air-assisted precision spot-spraying for robotic applications: Aerodynamics and spray coverage analysis[J]. Biosystems Engineering, 2016, 146: 216-226.
[59] Hamuda E, Mc Ginley B, Glavin M, et al. Automatic crop detection under field conditions using the HSV colour space and morphological operations[J]. Computers and Electronics in Agriculture, 2017, 133: 97-107.
[60] Ge L, Yang Z, Sun Z, et al. A method for broccoli seedling recognition in natural environment based on binocular stereo vision and Gaussian mixture model[J]. Sensors, 2019, 19(5): 1132.
[61] 丁为民,赵思琪,赵三琴,等. 基于机器视觉的果树树冠体积测量方法研究[J]. 农业机械学报,2016,47(6):1-10, 20.
Ding Weimin, Zhao Siqi, Zhao Sanqin, et al. Measurement methods of fruit tree canopy volume based on machine vision[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(6): 1-10, 20. (in Chinese with English abstract)
[62] Kameswari S, Prabhakar T, Kishore K K. Autonomous pesticide spraying robot using SVM[C]//Proceedings of International Conference on Wireless Communication. Springer, Singapore, 2022: 293-302.
[63] 蔡银杰,于翔,沈美. 基于机器视觉的植保无人机水稻纹枯病识别方法: CN109993228A[P]. 2019-07-09.
[64] Li Z, Fu Z, Shi Y, et al. Prototype system of automatic identification cotton insect pests and intelligent decision based on machine vision[C]//2003 ASAE Annual Meeting. American Society of Agricultural and Biological Engineers, St. Joseph, Michigan,2003: 1.
[65] Liu B, Zhang Y, He D J, et al. Identification of apple leaf diseases based on deep convolutional neural networks[J]. Symmetry, 2017, 10(1): 11.
[66] Zhang X, Qiao Y, Meng F, et al. Identification of maize leaf diseases using improved deep convolutional neural networks[J]. Ieee Access, 2018, 6: 30370-30377.
[67] Liu B, Zhang Y, He D J, et al. Identification of apple leaf diseases based on deep convolutional neural networks[J]. Symmetry, 2017, 10(1): 11.
[68] Singh U P, Chouhan S S, Jain S, et al. Multilayer convolution neural network for the classification of mango leaves infected by anthracnose disease[J]. IEEE Access, 2019, 7: 43721-43729.
[69] 宋余庆,谢熹,刘哲,等. 基于多层EESP深度学习模型的农作物病虫害识别方法[J]. 农业机械学报,2020,51(8):196-202.
Song Yuqing, Xie Xi, Liu Zhe, et al. Crop pests and diseases recognition method based on multi-level EESP model[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(8): 196-202. (in Chinese with English abstract)
[70] Karar M E, Alsunaydi F, Albusaymi S, et al. A new mobile application of agricultural pests recognition using deep learning in cloud computing system[J]. Alexandria Engineering Journal, 2021, 60(5): 4423-4432.
[71] 孙俊,何小飞,谭文军,等. 空洞卷积结合全局池化的卷积神经网络识别作物幼苗与杂草[J]. 农业工程学报,2018,34(11):159-165.
Sun Jun, He Xiaofei, Tan Wenjun, et al. Recognition of crop seedling and weed recognition based on dilated convolution and global pooling in CNN[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(11): 159-165.
[72] López-López M, Calderón R, González-Dugo V, et al. Early detection and quantification of almond red leaf blotch using high-resolution hyperspectral and thermal imagery[J]. Remote Sensing, 2016, 8(4): 276.
[73] 何宽. 基于高光谱成像的蓝莓病虫害的检测方法研究[D]. 沈阳:沈阳农业大学,2019.
He Kuan. Research on Disease and Pest Detection Method of Blueberry Based on Hyperspectral Imaging[D]. Shenyang : Shenyang Agricultural University, 2019. (in Chinese with English abstract)
[74] West J S, Bravo C, Oberti R, et al. The potential of optical canopy measurement for targeted control of field crop diseases[J]. Annual review of Phytopathology, 2003, 41(1): 593-614.
[75] Oberti R, Marchi M, Tirelli P, et al. Automatic detection of powdery mildew on grapevine leaves by image analysis: Optimal view-angle range to increase the sensitivity[J]. Computers and Electronics in Agriculture, 2014, 104: 1-8.
[76] 吴叶兰,陈怡宇,廉小亲,等. 高光谱成像的柑橘病虫害叶片识别方法[J]. 光谱学与光谱分析,2021,41(12):3837-3843.
Wu Yelan, Chen Yiyu, Lian Xiaoqin, et al. Study on the identification method of citrus leaves based on hyperspectral imaging technique, 2021, 41(12): 3837-3843. (in Chinese with English abstract)
[77] 邓小玲,曾国亮,朱梓豪,等. 基于无人机高光谱遥感的柑橘患病植株分类与特征波段提取[J]. 华南农业大学学报,2020,41(6):100-108.
Deng Xiaoling, Zeng Guoliang, Zhu Zihao, et al. Classification and feature band extraction of diseased citrus plants based on UAV hyperspectral remote sensing[J]. Journal of South China Agricultural University, 2020, 41(6): 100-108. (in Chinese with English abstract)
Current status and future development of the key technologies for intelligent pesticide spraying robots
Lan Yubin1,2,3, Yan Yu1,3, Wang Baoju1,3, Song Cancan1,3, Wang Guobin1,2,3※
(1.,,255049,; 2.,255049,; 3.,255049,)
Agriculture is crucial for economic development. Losses in agricultural production were caused by a variety of circumstances, but pests and illnesses are among the most important. The use of plant protection machinery to spray pesticides is still the most effective method of pest control at present. Traditional agricultural sprayers were inefficient and time-consuming, which caused pesticide waste and environmental contamination. In the process of spraying pesticides, farmers are directly exposed to pesticides, which is easy to cause bodily harm or even poisoning. With the steady progress of China's agricultural modernization, robots are widely used in agricultural plant protection work. Intelligent pesticide spraying robots are an effective method to solve the problem of applying pesticides in complex environments such as hills, orchards, fields, and greenhouses, which is more efficient and accurate. Intelligent spraying robot not only saves labor but also reduces the improper use of resources and environmental pollution. It is conducive to our better reaching of the goal of agricultural sustainable development. In this study, the research progress analysis of an intelligent pesticide spraying robot focuses on four respects: mobile chassis design, spraying the device design, navigation technology, and target detection technology. This paper discusses the factors limiting the development of intelligent pesticide-spraying robots for the primary technologies applied to various operation scenarios. Firstly, the mobile chassis design of the spraying robot was analyzed from the ground spraying robot and aerial spraying robot. The study and development of wheel-track composite robot chassis can integrate the advantages of wheeled chassis as well as a tracked chassis, which will be the research trend of ground intelligent spraying robot. Plant protection UAV is unrestricted by terrain, and can be applied to a variety of scenarios, which will be the key orientations for future research. Secondly, the spray devices required by the spraying robot in different spraying scenarios were summarized. It mainly includes an adjustable boom sprayer device, electrostatic spraying device, targeted spraying device, air-assisted spraying equipment, and profile modeling spray equipment. The most commonly used navigation methods are analyzed, including Global Positioning System (GPS) navigation, visual navigation, inertial navigation, multi-sensor fusion navigation, laser radar navigation, odometer, geomagnetic navigation, etc. Additionally, the detection methods of various pesticide spraying robots are evaluated from the perspectives of crop detection and pest detection. The deep learning algorithm can automatically extract the image features of crops, make use of the information, and exactly identify the location of crop pests and diseases, to quickly respond to achieve accurate spraying. Finally, the development trend of intelligent pesticide application robots for precise application is presented. Six requirements or prospects were proposed for the intelligent pesticide spraying robot development in the future, including to improve the response speed of the spraying robot, to improve detection accuracy, to design lightweight chassis, to reduce the development cost of the spraying robot, and to integrated air-ground spraying technology. In conclusion, intelligent and precise application robots have the potential to significantly improve the quality of precision agriculture operations by facilitating intelligent decision-making on operational parameters before actual operation.
pesticide spraying robot; intelligent sensing; autonomous operation; robot platform; spraying device
10.11975/j.issn.1002-6819.2022.20.004
S224.3
A
1002-6819(2022)-20-0030-11
兰玉彬,闫瑜,王宝聚,等. 智能施药机器人关键技术研究现状及发展趋势[J]. 农业工程学报,2022,38(20):30-40.doi:10.11975/j.issn.1002-6819.2022.20.004 http://www.tcsae.org
Lan Yubin, Yan Yu, Wang Baoju, et al. Current status and future development of the key technologies for intelligent pesticide spraying robots[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(20): 30-40. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2022.20.004 http://www.tcsae.org
2022-07-20
2022-09-18
山东省引进顶尖人才“一事一议”专项经费资助项目(鲁政办字 [2018]27 号);山东省自然科学基金项目(ZR2021QC154)
兰玉彬,法国欧洲科学、艺术与人文学院院士,博士,教授,博士生导师,研究方向为精准农业航空应用技术。Email:ylan@sdut.edu.cn
王国宾,博士,讲师,研究方向为精准农业航空施药技术。Email:guobinwang@sdut.edu.cn
中国农业工程学会高级会员:兰玉彬(E041200725S);王国宾(E041500068M)
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
今日农业(2021年7期)2021-11-27
好日子(2021年8期)2021-11-04
今日农业(2021年12期)2021-10-14
中老年保健(2021年5期)2021-08-24
故事作文·高年级(2021年5期)2021-06-01
当代陕西(2020年21期)2020-12-14
NBA特刊(2018年11期)2018-08-13
民生周刊(2017年19期)2017-10-25
岷峨诗稿(2017年4期)2017-04-20
