
磁探潜关键技术现状及发展趋势
2022-01-26 06:25张朝阳刘济民杨林
科学技术与工程 2022年1期
张朝阳,刘济民,杨林
(92728部队,上海 200436)
潜艇依靠其在海洋中的隐蔽性,对敌方构成巨大威胁,因此,在有潜艇参与的海战中,反潜是取胜的关键。反潜作为一项世界性难题,各国竞相发展各种反潜技术以提升反潜能力,以期在战争中占据主动,其中,磁探潜技术即是非常重要的一项。磁探潜就是利用磁探仪探测潜艇的技术,是一种常用的有效反潜技术手段。磁探仪简称磁异常探测仪,是一种探测潜艇产生的磁场异常并发现潜艇的仪器,也叫做磁力探测仪。在运用磁探仪进行探潜的反潜作战中,尽管由于潜艇磁场空间衰减快,该技术手段存在作用距离短的缺点,但磁探仪对潜艇产生的磁异常信号有着识别能力强、定位精度高、反应迅速、隐蔽性好等优点,在辅助声呐探测、狭窄海域等小范围精确定位方面应用广泛。在实战中,磁探潜往往要多种平台、多种手段综合运用,各种探测信息跨域融合,全系统协同分析判别,才能取得好的反潜效果,因此,磁探潜技术不仅仅限于航空磁探,还包括水面磁探、水下磁探等全空间、全介质的磁探潜技术,各种磁探方式均能在反潜中发挥重要作用。目前对于磁探潜技术的研究较多,但一般都集中在某一项具体技术研究方面,对总体发展现状及方向的研究较少,特别是涉及全域、全介质中的磁探潜技术则更少,迫切需要对磁探潜总体技术而不仅仅是航空磁探技术做一系统梳理,在了解磁探潜技术现状的同时,研判相关技术发展趋势,聚焦技术发展重点,创新进行磁探潜技术探讨,以为后续磁探潜技术发展和反潜能力提升奠定理论基础,为在反潜实战中占据主动提供支撑。基于这一目的,现从磁探潜探测效能与潜艇磁特征和磁探测系统的探测能力有关这一基点出发,着眼磁探潜效能的泛函表示,重点围绕磁探仪灵敏度和噪声抑制能力展开讨论,对磁探仪及其运用技术现状进行梳理,并对其发展趋势进行分析、明确发展方向,同时对磁探潜新机理进行探讨,以期为磁探潜技术发展提供参考。
1 磁探潜的泛函表示
磁探潜效能是目标潜艇磁特征和磁探测系统探测能力的泛函表示,如式(1)所示。其中,磁特征是潜艇磁性参数和空间位置参数的函数,如式(2)所示,而探测能力则是灵敏度、噪声抑制能力的函数,如式(3)所示。
E(AS)=F(B(S),A)
(1)
B(S)=f1(x,y,z,M)
(2)
A=f2(S,Ni)
(3)
式中:E(AS)为磁探潜效能;B(S)为目标潜艇磁特征;A为磁探测能力;x、y、z为探测位置坐标;M为目标潜艇磁矩矢量;S为磁探测系统灵敏度;Ni为磁探测系统噪声抑制能力。
式(1)~式(3)即为磁探潜的泛函表示,潜艇与磁探测系统共同构成空间磁对抗体系,在该对抗体系中,探测潜艇一方总是希望利用磁探测系统最大概率尽快地发现潜艇,即提高磁探潜效能E(AS),在同样目标磁特征条件下,可通过提高磁探测系统灵敏度S和噪声抑制能力Ni实现;对于潜艇一方,则是尽可能降低自身磁特征B(S)(可通过临时线圈消磁和加装消磁系统实现),以提高其磁隐身性能,增强磁对抗能力。因此,磁探潜技术的研究发展一般都是围绕磁探测系统的灵敏度(或探测精度)和噪声抑制能力两方面进行的。
2 磁探仪及其运用技术现状
在利用磁探仪探测潜艇时,信号输入除了包括潜艇磁场外,还包括环境磁干扰、搭载平台磁干扰等噪声信号,磁探潜就是一个将潜艇磁场信号从各种干扰混杂的信号中检出的信号处理过程,按照磁探仪所处位置,有空中磁探、水面磁探和水下磁探3种运用方式,如图1所示。对于每种磁探潜方式,磁探仪技术及磁信号检测处理(噪声抑制)技术都是其中的关键技术。

图1 磁探潜的三种运用方式Fig.1 The three application modes for magnetic submarine exploration
2.1 磁探仪技术现状
磁探仪系统为弱磁探测系统,其采用的磁传感器主要有磁通门传感器、光泵磁力仪、质子磁力仪、超导量子磁力仪等。
2.1.1 磁通门传感器
磁通门磁传感器是相对最为成熟的矢量磁传感器[1-2],1936年开始进行相关研究[3],经过80多年一直持续至今,其综合性能不断提升,在矢量磁场测量方面一直有着明显的优势。磁通门传感器是目前很多磁场测量实验室使用的测量仪器,在航磁测量中飞行姿态测量与控制、磁性目标三分量磁场及梯度测量、舰艇磁场测量等方面也均有应用[4-6]。灵敏度是磁通门传感器最为重要的指标之一,该指标取决于磁芯材料的噪声水平。随着磁芯材料技术及仪器噪声处理技术的进步,磁通门传感器的灵敏度理论上可以达到皮特斯拉级[7-9]。
国外对磁通门传感器的研究主要集中在欧美国家,比较著名的有英国的Bartington公司、乌克兰的LEMI公司、美国Billingsley Aerospace &Defense公司等,其生产的磁通门传感器,不仅灵敏度可以达到几个PT的水平,而且功耗特别低,广泛应用于航磁测量或水下测磁[9]。国内很多单位,如中科院电子所、上海海事大学、710所等,在磁通门传感器研制技术方面也水平较高。如710所当前研制的最新型号MS3A型磁通门传感器[10](图2)已达到国际先进水平。目前中国磁通门传感器技术主要是在磁芯材料技术研究、低功耗、数字化、稳定性、可靠性等方面与国外还存在一定差距。

图2 MS3A 型磁通门传感器Fig.2 MS3A fluxgate sensor
2.1.2 光泵磁力仪
光泵磁力仪又称电子自旋共振磁力仪,是利用某些元素的原子在外磁场作用下的塞曼分裂效应和能级跃迁原理来进行磁场测量的,测量磁场总量,常用于地质勘探中的航磁测量[11]和航空磁探潜中,其突出的技术特点[12-15]是:①噪声水平低,灵敏度高(达到飞特斯拉量级);②响应频率高,可进行高速测量,对磁性目标动态信号探测有较大优势,适合航空高速测量磁场;③测量量程较宽,一般可达20 000~100 000 nT,可在地磁场基础上叠加进行磁异常测量。
目前,无论是国外还是国内,光泵磁力仪都是航空磁探潜领域的主要装备,在航空反潜中发挥着重要作用。具体应用中,光泵磁力仪主要分为氦光泵磁力仪和铯光泵磁力仪两种。氦光泵磁探仪发展较早,代表产品为美国德州仪器公司研制的跟踪式光泵磁探仪AN/ASQ-81(V)[14-15],及其数字化改进产品AN/ASQ-208[15](图3),其静态灵敏度都达到了PT级的水平,主要装备于P-3、SH-2D、SH-3H、SH-60B、S-3等多型反潜飞机、反潜直升机。另外,美国Polatomic公司还开发了更先进的AN/ASQ-233型激光氦光泵磁探仪,静态灵敏度指标进一步提高。

图3 几种氦光泵磁力仪[15]Fig.3 Several helium optically pumped magnetometers[15]
铯光泵磁探仪采用铯光泵磁传感器进行探测,代表产品主要有加拿大CAE公司生产的AN/ASQ-504磁探仪及其最新改进的AN/ASQ-508A磁探仪。AN/ASQ-504(V)磁探仪装备于P-3C、P-1、SH-2、S-70B-2、C-295等反潜平台,AN/ASQ-508A磁探仪装备于P-8I飞机上(P-8A飞机的印度出口型),两型磁探仪的灵敏度也都在PT级水平。
2.1.3 质子磁力仪
质子磁力仪是美国于1955年研制的,又称为核子旋进或质子旋进磁力仪[16],是利用氢质子磁矩在磁场中自由旋进的频率来测量磁场,具有稳定性高、可靠性强、工作时不受温湿度等气象因素影响的优点,一般分辨率约0.1 nT/Hz1/2,其技术较为成熟,被广泛应用于陆地、海洋、空中的探测工作[17-18]。但由于极化频率高、存在进向误差、功耗较大、受励磁极化时间限制而不能长期连续测量[19-20]等不足,质子磁力仪动态响应特性相对较差,采样相对较慢(一般采样周期需要3 s以上),其一般用于低频磁场测量中,比如地磁台站监测[21]和空间磁探测。
2.1.4 超导量子磁力仪
超导量子磁力仪是基于超导状态下物质的量子隧穿特性,并通过使用超导回路与一对约瑟弗森结实现微弱磁场绝对测量的仪器[22-23]。超导量子磁力仪的技术特点是:①矢量磁力仪,可测量三分量磁场;②灵敏度高,可达1fT/Hz1/2;③测量范围宽,可从零场测量到数千特斯拉,并能测量恒定磁场和交变磁场;④响应频带宽,可测频率从直流到几千兆赫兹。这些特性使其应用范围远远超过常用的磁通门磁力仪和质子磁力仪。但由于超导量子磁力仪工作需要冷却装置,导致系统的体积、功耗和成本都较大。
国外对超导量子磁力仪很早就有研究和应用,如美国橡树岭国家实验室利用多个高温SQUID组成磁梯度探测系统[24],安装在直升机上进行UXO排查;德国海军则利用SQUID探测潜水艇[25];澳大利亚联邦科学工业研究组织(CSIRO)则用来地质调查和矿藏普查[26]。
国内相关机构也逐步开展了高温超导测量磁场的研究工作,如燕山大学与中科院物理研究所共同研制了高温超导量子干涉装置[27],并基于该装置设计了平面式梯度计[28];吉林大学、北京大学等研制了高温超导磁强计及磁梯度仪并成功应用于地质勘探等工作[29-30],虽一定程度提高了测量精度,但与世界先进水平相比还存在差距。由于超导量子干涉仪及其构建的磁梯度张量系统,成本高,体积大,且系统安装工艺与测量环境要求严格,还不适用于我军现阶段对敌水下或地面磁性目标的实际探测工作。
2.2 磁探仪运用现状
2.2.1 航空磁探
航空磁探主要是由反潜飞机(包括固定翼反潜飞机、反潜直升机或反潜无人机)搭载磁探仪,通过飞机的运动检测水上磁异常信号,达到探测识别水中潜艇的目的。目前航空磁探使用的磁力仪主要是光泵磁力仪,国外现役装备主要是AN/ASQ-81(V)型磁探仪和AN/ASQ-208型磁探仪(氦光泵磁力仪)、AN/ASQ-504磁探仪及最新改进的AN/ASQ-508A磁探仪(铯光泵磁力仪),其中使用最多的是AN/ASQ-81(V)型磁探仪[14]。磁探装备在使用时可以有机内固定安装(一般安装在尾部)、机后拖曳式等多种配置方式[31]。
近年来国内外开始研究应用矢量磁场测量技术用于航空磁测[32-33]。国外主要是基于超导量子磁力仪开展三分量磁场和全张量磁梯度测量,但超导量子磁力仪测量系统成本高、体积大,较为笨重,难以进行工程应用;国内则以成本低、体积小的磁通门传感器为基础,开展航空矢量磁场及全张量磁梯度测量技术研究,并积极用于地质勘探和磁性目标定位等领域[34-37]。
2.2.2 水面磁探
水面磁探的运用方式主要是拖曳式探测和浮标式探测。拖曳式探测采用舰船在海上拖曳海洋磁力仪的方式完成,通过测量海洋地磁场、分析测量到的地磁异常达到探测水中潜艇的目的。海洋磁力仪一般是光泵磁力仪或质子磁力仪,常见的仪器有美国的G882型海洋磁力仪,以及国内的GB-5A型海洋磁力仪、GB-6型海洋磁力仪、GB-6A型海洋磁力仪[15](图4),其中,GB-6A型海洋磁力仪已与美国的G882型海洋磁力仪功能性能相当。

图4 GB-6A型海洋磁力仪[15]Fig.4 GB-6A marine magnetometer[15]
美国在20世纪90年代曾进行过浮标式磁力仪的研究工作[38],仿真分析了磁探浮标布放深度、布放间隔、噪声水平等与潜艇探测概率、误警率之间的关系,为磁探浮标的作战运用提供了一定的参考,促进了基于磁场监测方式的磁探潜技术的发展。在国内,限于磁探浮标探测距离不如声呐浮标的认识,关于磁探浮标技术的研究较少。
2.2.3 水中磁探
水中磁探运用方式主要是依托水中航行器搭载磁探仪探测潜艇。该种探测方式中,磁探仪一般采用磁通门传感器。磁通门传感器结构小巧、功耗低、体积小,可以搭载在潜航器、船只等各种载具上,对潜艇等水下磁性目标进行探测。如图5所示为美国 Woods Hole海洋研究所的ABE无人潜航器搭载的一只三轴磁通门传感器[10],用于水下磁性目标探测。
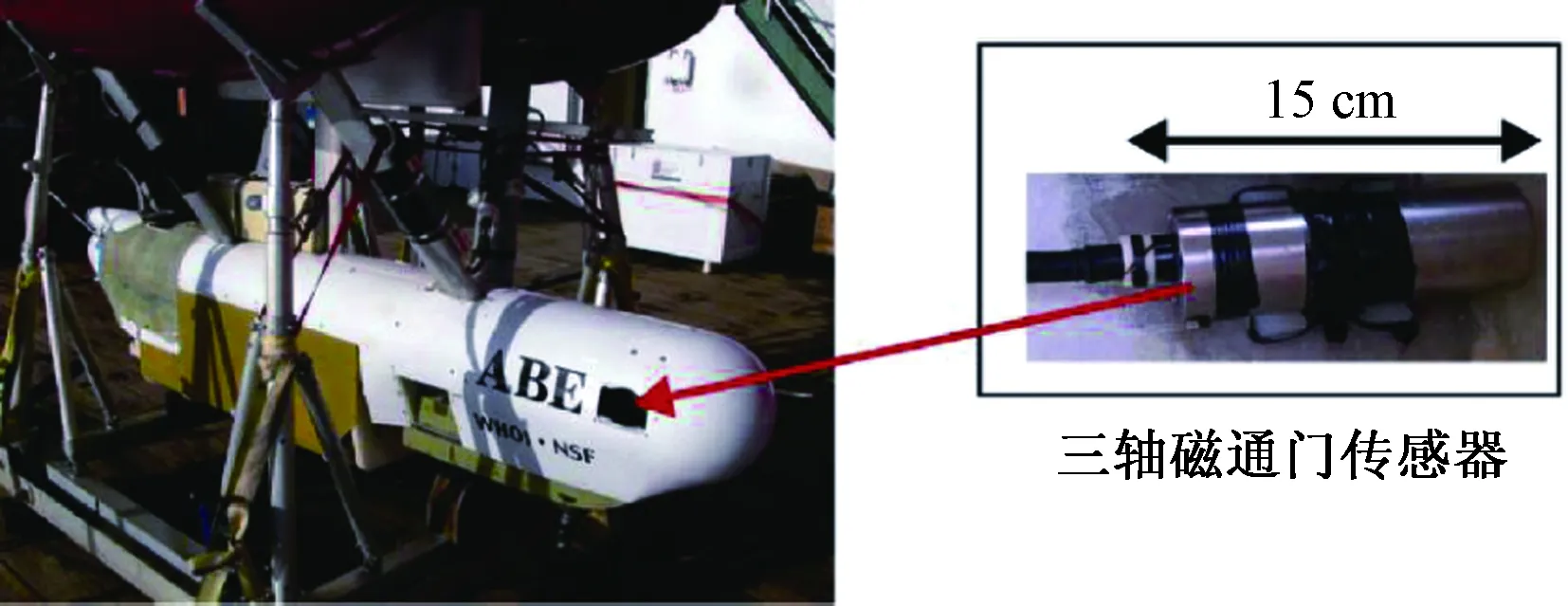
图5 潜航器搭载磁通门传感器[10]Fig.5 The AUV equipped with a fluxgate sensor[10]
布置基站是水中磁探的另一种运用方式。基站主要在重要港口和水道进行布置,通过设置磁传感器阵列来监测潜艇等水下目标的入侵。比如,国内学者曾研究提出了栅栏式水下磁性防御网、分布式水下磁性防御网的布置概念(图6),可分别发挥瓶颈区域监视和广阔海域监视的作用[39],后续有学者又进一步在阵列布设方案及点阵距离、背景噪声等相关参数优化方面进行了研究[40],为其工程化有效应用进一步奠定了基础。国外也很重视利用磁探基站进行水中反潜,DADS系统即是美国海军研究办公室(ONR)和空间与海战系统司令部(SPAWAR)联合研发的未来海军滨海防雷反潜作战研究项目,该系统利用磁通门传感器节点探测可对滨海水下入侵起到很好的防护效果[10](图7)。

图6 水下磁性防御网[39]Fig.6 The underwater magnetic defense networks[39]

图7 基于磁通门阵列的美国DADS系统架构示意图[10]Fig.7 The diagram for American DADS system architecture based on fluxgate sensor array[10]
2.3磁探测信号处理技术现状
磁探测信号处理技术主要是对磁探仪探测到的磁场信号进行干扰排除、噪声抑制处理,得到单纯的潜艇磁异常信号的过程,如图8所示。

图8 磁探潜信号检测处理流程Fig.8 The signal detection and processing flow for magnetic submarine exploration
无论是空中磁探方式,还是水面、水中磁探方式,磁探潜总体上可分为动态探测(磁探仪随载体运动)和静态探测(磁探仪静止)两种,而磁探测信号的处理也是基于这两种方式有所区别。静态探测信号处理主要是需要排除环境噪声、仪器本身动态噪声的干扰,主要涉及水面磁探中的浮标探测和水中磁探的基站探测两种场景;动态探测信号处理,除了环境噪声和仪器本身噪声外,还需要排除运动载体的磁场干扰,主要涉及航空磁探和水中载体搭载探测两种运用方式。
对于环境噪声的补偿抑制,主要是采用滤波技术,对各频段的环境噪声比如海浪磁场噪声[41-42]等加以滤除,对于仪器本身的动态噪声,主要是针对仪器本身电气参数特性及信号特征[43],在软件上进行动态噪声的补偿处理。
对于搭载平台本体造成的磁干扰,一方面采取优化磁探仪布置位置减小干扰磁场的方法,另一方面通过建立干扰数学模型、求解补偿系数的数学方法达到干扰抑制的目的。比如,反潜直升机吊放磁探仪[44]及海洋测量船拖曳磁力仪[45],都是通过加装拖缆减小平台本体对磁探仪的干扰。反潜飞机也可以通过优化磁探仪位置,比如加装支杆安装磁探仪减小磁场干扰[46],在干扰磁场较小的翼尖安装磁探仪[47],但这样的措施效果是有限的,特别是对固定翼反潜飞机,往往需要通过建立数学模型进行干扰补偿。
随着磁力仪灵敏度的提高,磁探补偿的精度要求也越来越高。Tolles-Lawson方程是航磁补偿技术发展的基础方程,1979年,Bickel在该方程基础上提出了一种小信号求解方法,很好地解决了磁补偿系数的求解问题,成为系数求解的经典[48]。后续通过进一步改进研究逐步形成了16项系数补偿模型[49],该模型通过4个典型航向的飞行测量,6 min即可完成16项系数的计算,从而较好完成干扰补偿工作。该模型是目前航空磁探中应用的主要补偿模型。在实装中应用的磁补偿器主要有国外的AN/ASA-65补偿器、AADC-II数字式磁补偿器,国内的GB-4A 9项补偿器、H/XXC数字自动补偿器等。
近来,国内外对于航磁补偿技术的研究比较热门,主要围绕补偿数学模型和补偿系数求解进行了大量研究[50-60],特别是文献[60],针对补偿中存在的地磁场梯度问题,提出了把磁补偿系数中的地磁场分离的解决方案,把地磁场当作变量重新推导磁干扰模型,提高了模型的求解精度,改进了现有的磁补偿算法。
对于水面和水中的载体干扰磁场排除,其原理方法与航磁补偿方法基本类似,也是基于Tolles-Lawson方程进行一些适应性变换[61],达到干扰磁场软补偿的目的。
3 磁探潜技术发展趋势分析
3.1 磁探测仪器发展趋势
随着材料工艺和测量技术的进步,应用于磁探潜的磁通门传感器、光泵磁力仪、质子磁力仪及超导量子磁力仪等磁探仪的发展,呈现出如下几个方面的趋势。
(1)磁通门传感器向更高灵敏度、更低功耗、更小体积趋势发展。磁通门传感器是磁探测中应用最多的传感器,低功耗、体积小、矢量测量是其显著优势,随着探测精度要求的提高,磁通门系列传感器也在不断提高灵敏度和测量精度,其矢量分量测量精度可达到0.1 nT,加上其体积小、低功耗的优势,在未来磁探测,特别是矢量磁探测和磁场梯度探测领域必将会看到越来越多磁通门传感器的身影。
(2)小型化、低成本化将是光泵磁力仪发展的主要方向。光泵磁力仪作为航空磁探的主要探测仪器,测量精度高、动态响应特性好是其主要优点,但体积较大、成本相对较高、存在盲区等不足也对其造成了一定程度的应用限制。近来随着光泵测量新机理的探索、全光光泵磁力仪技术的研究,其小型化、低成本化及探测盲区消除等将逐渐成为现实,使得光泵磁力仪的应用范围变得更广。
(3)提高动态响应特性及高精度矢量测量技术是质子磁力仪等原子磁力仪的研究方向。质子磁力仪等原子磁力仪受原理限制,其动态响应特性相对较差,一般用于采样速率要求不高的地磁台站监测及空间磁场探测等场合。但由于其高稳定性和小巧轻便的优点,仍有较好的应用前景,可通过原理研究改进提高其动态响应特性,发展高精度矢量测量技术进行磁源定位,不断扩展原子磁力仪的应用。
(4)小型化、低成本化及高温化是超导量子磁力仪的努力方向。超导量子磁力仪的突出特点是灵敏度高、矢量测量,目前在军事反潜中应用前景广阔。但由于其利用超导技术,冷却装置不可缺少,造成体积相对较大、成本较高,使得其在磁探潜中难以有效运用。随着高温超导技术的不断进步,将逐步实现小型化、低成本化,其在高精度磁探测、矢量磁探测及全张量梯度探测运用中的优势将逐步凸显出来。
3.2 磁探仪运用方式发展趋势
3.2.1 空中磁探运用发展
传统航空磁探技术的发展主要是基于两个方面,一是发展新的磁探测系统,二是发展新的搭载平台。磁探测系统技术的进步主要依赖于磁通门传感器、光泵磁力仪、超导量子磁力仪等传感器技术的发展,其发展往往也与搭载平台的变化有关。近年来,航空磁探搭载平台的无人化是最明显的发展趋势,超低空飞行、长航时、集群化运用以及智能化等特点,使得无人机日渐成为航空磁探潜中的重要角色。
磁探无人机可通过结构设计、材料选择等从源头较好控制平台本体磁干扰;同时可根据需求研制大型、小型或微型磁探无人机,用于执行巡逻反潜、应召反潜或攻击反潜等不同反潜任务;无人机磁探的另一重大运用方向是集群运用,即运用多架无人机自主协同完成某区域磁探潜任务,将显著提升探潜效率和作战效能,其中人工智能将发挥重要作用;另外,对于一次性使用的非回收型磁探无人机,可结合浮标形式运用,在无人机航时耗完落入海中后,使其成为磁探浮标继续在某一区域发挥磁场监测的重要作用。
3.2.2 水面磁探运用发展
水面磁探的运用发展主要是基于舰船拖曳式探测和浮标探测两种形式,舰船拖曳探测技术主要随磁传感器技术及平台无人化的发展而发展,同时笔者认为,磁探浮标的发展运用可能是将来水面磁探运用发展的重要方向。磁探浮标运用技术目前在国内外研究较少,尤其是国内尚属空白,其主要原因在于探测距离有限的不足。但随着磁传感器技术及磁场测量技术的进步,一方面可用于磁探浮标的磁传感器性能将越来越好,另一方面仪器成本也将逐步降低,在这种情况下,使用浮标进行磁探潜将成为一种可行且经济的技术手段。由于成本较低,可以通过大量布放形成数量优势弥补其探测距离相对有限的不足,并且磁探浮标的布放可依托各类反潜飞机(包括无人机)或舰船,特别适合在重要海域和编队周边及港口外沿、重要航道等进行布放,可较好完成区域防御、编队防护及要道堡垒的使命任务。
3.2.3 水中磁探运用发展
水中磁探运用发展主要基于水中航行器搭载和基站布置两种方式。与空中磁探类似,水中航行器也日渐朝着无人潜航器的方向发展,利用无人潜航器搭载磁力仪在重要海域游弋探测,也将是未来水中反潜的一种辅助方式,可用以警示、驱赶敌方潜艇。基站布置则主要是在港口外沿、重要航道,可有效发挥要域防御、磁场监测的重要作用。后续可考虑布置于远海要道或前沿海域,用于侦测敌方潜艇或舰艇磁场信息,进而提供敌方兵力动态信息,为我方行动提供情报支持。
3.3 磁探测信号处理技术发展趋势
随着磁探测仪器技术的发展,磁传感器的灵敏度越来越高,在各类磁探测技术运用中,磁场噪声的干扰也愈发显得突出。在无法有效抑制各种噪声的情况下,单纯提高磁传感器的灵敏度是徒劳的。为有效发挥高性能磁传感器的卓越性能,除优化仪器测量电路设计、减小仪器本身噪声外,最重要的就是精细化分析环境噪声干扰、平台噪声干扰及动态噪声干扰等,建立更加精确的噪声磁模型,从数学上将各类噪声更加干净的予以消除,从而有效利用仪器的高灵敏度提高磁场测量精度。因此,随着磁场测量技术的发展,研究更为精确的噪声模型和补偿技术将是未来磁探潜技术发展的重要方向,其将是提升潜艇磁探测效能的有效着力点。
4 磁探潜新机理探讨
4.1 潜艇磁场遥测问题探讨
到目前为止,所研究发展的磁探潜技术,其本质都是通过磁传感器测量其所在位置的潜艇磁场而“感知”到潜艇的存在,进而达到探测潜艇的目的,因此磁探仪所在位置必须保证潜艇磁场达到一定的强度,而潜艇磁场衰减特别快,在不大的空间范围内就几乎衰减到零,也正是这一点限制了磁探潜的探测距离。但潜艇周围空间磁场是客观存在的,可视化后即为一个包络的球体,如果能够利用某种粒子或射线从远处“扫描”看到这个球体,那么就可以发现潜艇所在区域,进而采取进一步措施确定潜艇准确位置。该方法可称为磁场遥测,笔者认为,若想在磁探潜技术上取得颠覆性创新,磁场遥测是一个突破点。2019年,中国科学院上海光学精密机械研究所运用激光测磁技术,利用研发的一种基于门控光子计数的中间层磁场遥测装置[62],通过测量照射地表上方85~100 km钠层后反射回来的光子,实现了空间磁场的测量(空间磁场的遥测),精度虽然不高,但使我们看到了磁场遥测的可能,期望后续不断有类似的关键技术取得突破,以早日实现潜艇磁场的遥测,破解反潜的世界难题。
4.2 基于德拜效应的磁探潜技术探讨
潜艇航行时产生的水下扰动、尾流及舵面产生的微型漩涡会产生微弱的磁异常信号,称为德拜效应[31],该现象已被2009年成立的美国海军研究实验室所证实,目前,美俄都在积极探索德拜效应,并推动相关研究工作,国内近年也进行了一些初步研究,主要是对德拜效应磁场的仿真研究[63],通过物理模型分析,推导了德拜效应磁场表达式,采用计算机模拟仿真,获得了潜艇流场分布特性,进而根据德拜磁场传递方程,得到了德拜磁场分布特征,为实现基于德拜效应的磁探潜提供了理论支撑。德拜效应在反潜领域有着良好的应用前景,待超导量子磁力仪等高精度磁力仪取得突破并应用后,将有望实现对摩拜效应微弱磁信号的探测。而一旦实现对微弱信号的大范围搜索,将对水下作战装备产生深刻影响,将使当前潜艇采取的低磁材料、临时线圈消磁、安装消磁系统等消磁措施失效,潜艇隐身能力将受到极大挑战。
5 结论
磁探潜技术是反潜的重要技术手段,随着磁传感器技术和信号处理技术的发展,其地位愈加突出。磁传感器技术总体上朝着小型化、高灵敏度、低成本化、低功耗等方向发展,更高精度的光泵磁探测系统研制将是传统磁探仪的重要发展方向,以超导量子磁力仪和磁通门传感器为主要代表的矢量磁探仪的研究将牵引矢量磁场测量及磁场梯度、张量测量技术的发展,为磁探潜技术的发展注入新活力;磁探仪运用主要朝着无人化、智能化及多样化方向发展,从航空磁探到水下磁探,磁探无人机、磁探无人潜航器等无人平台的研究及应用,都代表了磁探测运用方式的主要发展方向,磁探基站和磁探浮标等运用方式则代表了磁探测多样化运用方向,在军事监测及海上防御中将起到重要作用;磁探测信号处理技术的发展是提升磁探测效能的关键,其中磁干扰模型研究及干扰排除技术是磁探测技术研究发展的重点;对磁场遥测、德拜效应等新机理的探讨将有可能引发磁探潜技术的革新,寻找类似的突破点,将是颠覆传统反潜技术的有效途径。后续,将根据磁探潜技术发展趋势,对磁探潜技术及其创新运用、潜艇磁场遥测技术等进行重点跟踪和深入研究。
猜你喜欢
大电机技术(2022年5期)2022-11-17
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
小哥白尼(军事科学)(2022年1期)2022-04-26
小哥白尼(军事科学)(2022年1期)2022-04-26
小哥白尼(军事科学)(2021年6期)2021-11-02
小哥白尼(军事科学)(2021年12期)2021-03-29
小哥白尼(军事科学)(2021年11期)2021-02-28
小哥白尼(趣味科学)(2019年6期)2019-10-10
小学科学(学生版)(2019年6期)2019-07-10
