智能汽车自动驾驶的控制方法分析
2022-01-25 21:13邹理炎虞忠潮
时代汽车 2022年2期
邹理炎 虞忠潮


摘 要:自动驾驶汽车通过使用电脑系统来实现无人驾驶的目的,自动驾驶模式的应用能够有效地解决各种类型的交通事故,降低人力成本,对促进社会发展具有重要的实用意义。但自动驾驶控制技术仍然存在诸多问题,例如传感器的可靠性不强、控制系统存在漏洞等都影响着自动驾驶技术的安全性。基于以上背景,首先阐述了智能汽车自动控制系统的原理以及设计架构,然后分析了智能汽车自动驾驶的控制与执行,最后重点探讨了智能汽车自动驾驶控制仿真验证,以其为改进智能汽车自动驾驶控制方法提供参考。
关键词:智能汽车 自动驾驶 控制方法
Abstract:Autonomous vehicles use computer systems to achieve the purpose of unmanned driving. The application of autopilot mode can effectively solve various types of traffic accidents, reduce labor costs, and has important practical significance for promoting social development. However, there are still many problems in automatic driving control technology. For example, the reliability of sensors is not strong, and the loopholes in the control system all affect the safety of automatic driving technology. Based on the above background, firstly, the principle and design architecture of the smart car automatic control system are explained, then the control and execution of the smart car automatic driving are analyzed, and finally, the simulation verification of the smart car automatic driving control is discussed, which is used to improve the control methods of the smart car automatic driving, and provide reference.
Key words:smart car, autonomous driving, control method
1 引言
自動驾驶汽车技术是一种利用人工智能、视觉计算、雷达监测以及定位等技术来实现无人驾驶的一种智能汽车控制技术,能够根据路况条件自动地对车辆进行安全操作,以打造高效化的控制模式。但目前,受到传感器、控制系统等因素的限制,目前所使用的汽车自动驾驶技术并未达到100%安全。比如,发生的某自动驾驶汽车致死事件,就是控制系统没有识别出危险源而导致的。因此,对智能汽车自动驾驶的控制方法进行分析具有重要的实践意义。
2 智能汽车自动驾驶技术概述
智能汽车自动驾驶技术是指利用电脑、雷达、传感器等系统,实现汽车驾驶的智能化、无人化。智能汽车与传统汽车的驾驶存在本质上的区别,自动驾驶的智能汽车能够利用各种智能化、信息化、物联网技术来帮助人们更加高效、安全地驾驶。具体而言,智能汽车自动驾驶技术是指利用定位系统、互联网技术、智能技术、图像处理技术等,通过对汽车行驶路况、行驶信息等的采集、整理、分析来达到汽车无人操控,实现路径规划、自动避障等目标。
3 自动驾驶系统原理及设计结构
汽车自动驾驶系统一般由三大模块组成,即感知模块、规划决策模块与执行模块。其中感知模块主要功能是对汽车行驶现场的各种信息进行采集,规划决策模块则是依靠感知模块所采集到的信息,对驾驶的任务序列进行规划与决策,执行模块的主要功能是执行规划决策模块的指令,执行驾驶汽车的任务。(1)感知模块。感知模块主要由各种形式的传感器组成,传感器用来对汽车的行驶参数、行驶环境以及司机状态进行检测,对汽车行驶参数的采集主要依靠车辆运动传感器实现,例如,车辆内的速度与角度传感器可以提供车辆纵横向的运动状态信息。对行驶环境的检测主要借助于环境感知传感器实现,例如车辆内所布设的各种形式的雷达、摄像头等均能够对行驶车辆的周边环境信息进行实时采集。另外,对司机状态的检测则主要是利用驾驶员位置处所布置的传感器完成,通常包括生物电的非接触式以及生物电传感器接触式两种,一般驾驶员状态检测传感器主要安装在仪表板、方向盘等部位,能够达到对驾驶员表情特征、心脏、脑电波等信息的采集,以此确保驾驶员处于最优的驾驶状态,提升驾驶安全性。(2)规划决策模块。规划决策模块在一定程度上可以说是自动驾驶汽车的大脑,即决定怎样驾驶。规划决策模块是由计算机组成的计算单元,各类传感器将采集到的信息数据统一至计算单元,进行统一的规划决策,进而确保汽车在行驶的过程中,能够在各种突发情况下做出最优的实时响应,确保汽车行驶的安全性。(3)执行模块。执行模块是执行规划决策模块指令,通过接受规划决策模块的指令来控制汽车的转向、刹车、停车的动作。
4 智能汽车自动驾驶的控制与执行
4.1 纵向控制
纵向控制主要包括对汽车驾驶运动状态的控制,具体而言是指对汽车行驶速度、加速度的控制。通过汽车运动模型、制动模型以及油门控制模型之间的配合,根据汽车行驶信息的检测来进行汽车的纵向控制。
4.2 横向控制
横向控制是指对汽车自动行驶过程中运动方向的控制,横向控制的实现离不开汽车转向动力学模型的支持。也就是说汽车转向动力学模型在本质上是一种精度型更高的汽车横向运动模型,模拟驾驶员转向操控经验来获取横向控制算法。如图1所示是某智能自动驾驶商用汽车转向系统构件图,在传统的转向系统基础上增加了ECU控制单元,作为整车中的一个执行机构,ECU控制单元一方面接受来自整车控制器的转向指令如转向角度、转向速度等,另一方面ECU控制单元需要实时监控整车实际的转向情况并作出反馈,通过转向系统预先设计好的控制算法做到实时修正,起到闭环控制的作用,让整车行驶更安全、更高效。
4.3 车辆控制平台
车辆控制平台主要由整车ECU电子控制单元与通信总线两大块组成,其中整车ECU电子控制单元是用来对汽车行驶的控制与计算,通信模块则主要用于指令的传输。整车ECU的结构原理与计算机类似。
4.4 智能汽车自动驾驶车辆道路状况识别
自动驾驶汽车在行驶的过程中,对道路状况信息的识别与处理是确保自动驾驶汽车行驶安全的重要保障,只有确保自动驾驶汽车能够有效地对道路状态进行识别,才能有效地发挥出车辆运行监督的作用。如图2所示,为智能汽车自动驾驶车辆监督控制中的道路识别示意图。自动驾驶车辆的道路状况识别所使用的为状态识别监督控制体系,即按照车辆运行监督控制要求对道路的状况进行识别。以点t作为车辆监督运行中的时刻,在状态监督基础之上,与道路状况识别功能相结合,进而确保为汽车驾驶监督提供保障。
4.5 智能汽车自动驾驶控制仿真验证
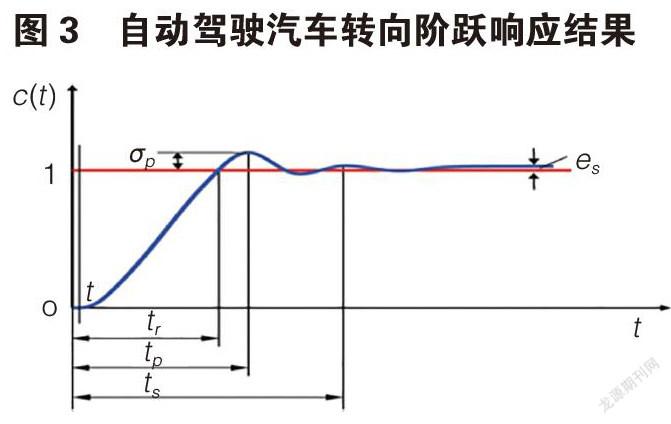
结合智能汽车自动驾驶控制工作的要求,对控制体系仿真实验做出调整。从实验仿真结果来看,在车辆自动驾驶控制过程中,对模糊PID控制体系的使用能够对车辆的运行状态進行控制与调整,并对车辆的运行监督控制方式进行调整优化,并按照仿真模型构建对自动驾驶控制系统进行了验证。从图3可以看出,车辆自动驾驶控制技术应用水平提升,其相应的模糊控制稳定性与平稳性均得到有效的提升,因此,为更好地达到监督车辆自动驾驶运行的效果,应按照监督控制要求,将上升时间和超调量进行优化调整,进而确保车辆能够满足自动驾驶需求。自动驾驶汽车转向响应的实际效果与期望值是有一定的误差,但通过对这些参数的仿真,并把它控制在有效的范围内,将大大提高整车行驶的安全性,可控性。
响应时间(t):下发期望指令到转向机开始动作的时间。
上升时间(tr):下发期望指令转向机从开始动作到期望角度所用的时间
峰值时间(tp):下发期望指令到转向机达到第一个峰值所用的时间。
超调量(σp):响应超出期望值的最大偏离量与期望值的百分比。
调节时间(ts):响应达到并把保持在期望值5%以内所需的时间。
稳态误差(es):时间趋近于无穷时响应与期望值之间的误差。
5 结论
车辆自动驾驶技术的出现,革新了车辆行业的发展模式,对社会、驾驶员以及行人均有益处。通过对自动驾驶控制技术的研究,相信随着汽车自动控制技术的不断发展,车辆自动驾驶技术将会得到普及,汽车交通事故将逐渐趋于零,为国家、社会节约大量的成本。且车辆自动驾驶具有减少能源消耗、缓解交通拥堵、降低运输成本等优点,相信在不久的将来,车辆自动驾驶技术将在社会各个领域发挥更大优势。
参考文献:
[1]孙剑,黄润涵,李霖,刘启远,李宇迪.智能汽车环境感知与规划决策一体化仿真测试平台[J].系统仿真学报,2020,32(02):236-246.
[2]雷洪钧.汽车驾驶自动化分级技术要求及组织实施的探讨[J].汽车工艺师,2020(05):25-29+33.
猜你喜欢
汽车周刊(2017年5期)2017-06-06
中国科技纵横(2017年4期)2017-05-16
移动通信(2016年24期)2017-03-04
居业(2016年9期)2016-12-26
文艺生活·中旬刊(2016年11期)2016-12-13
企业技术开发·下旬刊(2016年9期)2016-11-23
中国集体经济(2016年26期)2016-11-19
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
家用汽车(2016年9期)2016-11-04
环球时报(2016-08-16)2016-08-16