基于地面LiDAR的苏式庭院三维重建
2022-01-25 06:26成余刚吴正伟
现代测绘 2021年5期
成余刚,吴正伟,周 益
(1.南京工业大学测绘科学与技术学院,江苏 南京 211816;2.泰州市地理信息测绘院,江苏 泰州 225300)
0 引 言
平面图和剖面图作为描述建筑物内部结构和位置布局的空间数据应用十分广泛,传统的建筑物平立剖绘图,主要采用全站仪、RTK等全野外数字采集,加以皮尺、手持测距仪辅助测量来实现。该方法存在工作量大、作业方式不灵活、效率低等缺点。无人机倾斜摄影测量在高大建筑物立面的测绘中得到广泛应用,正射影像信息全面、容易获取,但是也有受遮挡严重影响精度不高,建筑物内部结构数据并不完整,城区无人机空域限飞等问题。激光雷达技术作为一种新兴的主动遥感技术,能快速、精准地获取目标对象丰富的纹理信息和三维空间结构参数。特别地,地面三维激光扫描具有主动性强、操作方便、信息量大和建模速度快等特点,能够灵活运用在室内外测图和建模中。龙润泽等[1-2]介绍了三维激光扫描技术在建筑物平面图生产中的应用,主要应用在混凝土建筑的测量,只是简单测出墙体轮廓。张立等[3-6]总结了三维激光扫描技术在建筑物立面测量作业流程和精度分析,通过实例分析验证了该技术在建筑立面测量的可行性。梁晨等[7-8]采用三维激光扫描仪采集点云数据,利用建模软件建立建筑物三维模型,阐释了三维模型可直观地展现建筑物各个侧面和构造的优势。大量学者利用三维激光扫描绘制建筑物立面和建模,仅用地面三维激光扫描仪难以得到全面的建筑物数据,采用无人机结合地面三维激光扫描仪提高了扫描覆盖率,但由于不同源点云难以融合,只能合并各自的二维矢量成果,无法直接利用点云建立完整三维模型。
本文以上海市松江区某苏式建筑风格庭院为研究对象,探讨基于三维激光扫描技术的苏式庭院三维建模方法,研究外业数据采集、点云数据处理、三维重建、精度评定以及建筑物平面图、立面图、剖面图的绘制和模型重建等作业流程和步骤,以期形成一套完整和高效的苏式庭院三维重建方法。
1 研究区选取及数据采集
1.1 研究区概况
本文研究区为上海市松江区某苏式风格古建筑,经现场踏勘,该宅院位于园区内部,分为三个板块共计1.5 km2,中间主体为迁建过来的苏式风格的庭院古建,面积不大但讲究亭台轩榭的布局,新建钢结构玻璃房、铝格栅吊顶等建筑,功能间较多,内部狭窄复杂,屋顶遮挡严重。
1.2 研究目的和流程
本项目需要对庭院做整体测量,供设计师设计图纸做参考,包括建筑物的平面位置、房屋高度、长度、宽度、门窗尺寸、滴水投影线、屋檐高度、屋脊轮廓,需绘制建筑物的平面图、立面图和剖面图。利用常规的测绘手段短时间内难以完成对建筑物复杂内部结构的测量,无人机作业存在空域限飞、建筑内部数据缺失等情况,因此采用地面三维激光扫描技术进行全方位建筑测图。经过前期的现场踏勘,了解建筑物特征并收集资料,编写方案设计,然后现场扫描,内业数据处理得到庭院点云数据。苏式庭院中间主体为古建筑,为满足客户三维可视化展示和数字化存档的需要,进行苏式庭院的三维实体重建,包括二维矢量提取、三维几何建模和纹理贴图。具体实现流程如图1所示。
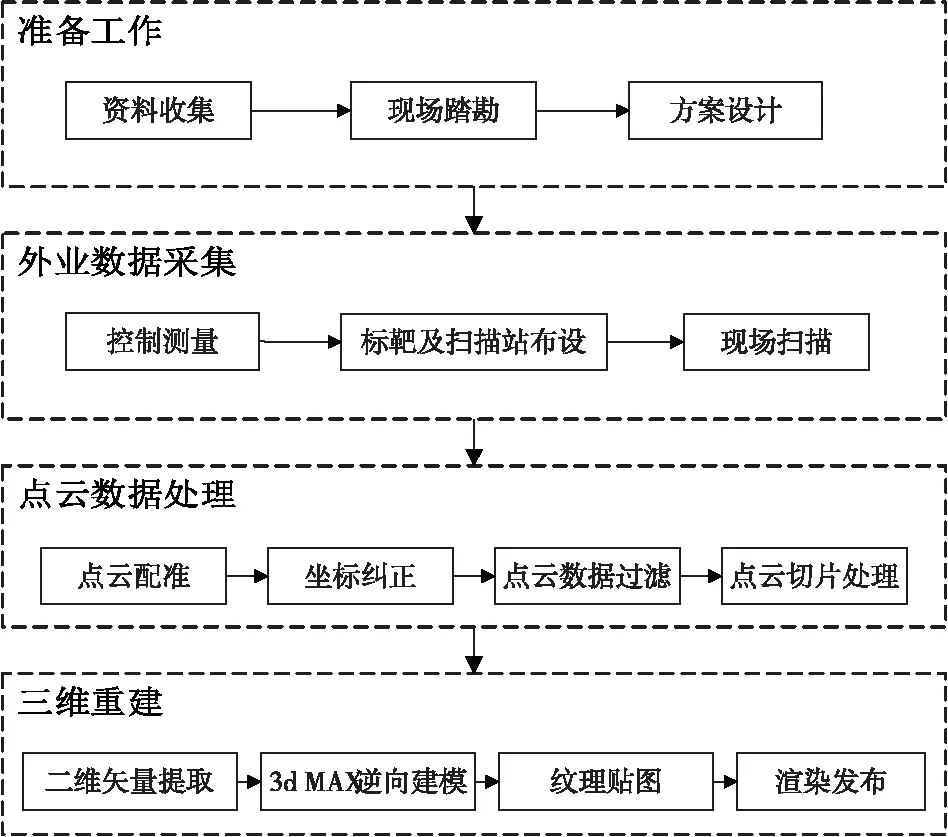
图1 苏式庭院三维建模流程
1.3 外业数据采集
外业数据采集分为方案设计和现场作业,方案设计是作业前的规划,包括根据扫描对象特征选择采集方法和架站方式、规划扫描路线和控制点选址;现场作业包括依据路线依次扫描和控制测量。为了控制误差的积累,保证测图的精度,提高现场作业的流畅度,外业数据采集遵循由整体到局部,先控制后碎步的原则[10]。其次基于建筑室内室外空间大小变换频繁,内部分布玻璃房、顶部遮挡严重等情况,需要考虑室内外、屋顶与地面的联系。
1.3.1 点云数据采集方法
根据作业目的和用途,结合扫描目标特征选择不同的作业方式。此苏式庭院主体90%是砖木结构房屋组合而成,局部是玻璃材质,采集方法分为主体扫描和局部扫描。
(1)主体扫描。建筑整体含有丰富的软件容易拟合的特征点,如房屋角点、顶点、柱体的轴心线、棱线、人工建筑的表面等。所以主体点云获取采用基于地物特征点拼接的数据采集方法。
(2)局部扫描。苏式风格的建筑中新建了几处钢结构玻璃房屋,中间功能厅位置用玻璃吊顶,玻璃对激光产生折射和穿透,屋顶结构遮挡严重,采用特征点拟合误差较大无法完成拼接。人工靶球不受玻璃折射和穿透的影响,可实现相邻测站的快速拼接,因此这些位置采用基于标靶的数据采集方法。
1.3.2 架站方式
根据仪器类型和建筑特征采用扫描仪任意设站、多站拼接的方式。基准站与其前后站组成扫描作业单元,假定扫描仪下一站方向为扫描前进方向,基准站与前一站连接标靶称为前视标靶,基准站与后一站连接标靶为后视标靶,前后视标靶均为3个,类似水准测量的方式搬站依次扫描。特殊地,为了采集屋顶的数据得到庭院完整点云,设计出地面与屋顶扫描作业单元如图2,图中A1为地面测站,A3为屋顶测站,范围最广的A2为升降机空中测站,3个测站实现地面与屋顶的联系。
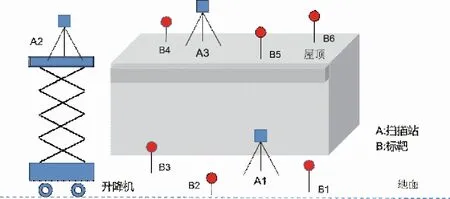
图2 地面与屋顶联系扫描作业单元
作业时,在地面和屋顶分别布置3个靶球,利用升降机将扫描仪升到屋顶斜上空,注意扫描仪和最远标靶之间距离小于扫描站有效扫描距离,升降机平稳时伺机开始扫描,仪器自动监测倾斜超限,若超限会终止扫描。
1.3.3 架站数量
扫描前对架站位置和行进路线初步设计,扫描时根据情况做出调整。按照大空间转小空间架设3站,中间连接处加1站,相邻测站之间通视并有至少30%重叠度,测站间距为有效扫描距离一半的原则。
1.3.4 扫描站设置
配置文件选择室外有效扫描距离20 m,分辨率根据室内和室外空旷不同做出调整;传感器选择倾角仪;为节约扫描时间关闭彩色扫描;全景式扫描,单站获取水平0~360°,垂直-60~90°的视场范围。
1.3.5 控制测量
庭院周围空旷,直接用RTK测量控制点,将棋盘靶纸贴在便携的记录板上作为棋盘板目标,如图3所示,此棋盘板目标在点云中很容易拟合得到十字交叉点坐标。在设计方案时布设5个控制点均匀分布在测区,扫描仪扫到控制点所在测站,将棋盘板目标放置在激光束入射角大于45°位置,先用RTK测量十字交叉点在上海2000平面坐标系下的坐标,然后完成扫描仪采集。这样控制测量和扫描同步进行,避免了控制点被移动带来的误差和复测,一个人即可完成测量,提升了工作效率。

图3 便携棋盘板目标
2 点云数据处理
点云数据的处理包括注册扫描、坐标转换和点云过滤。
2.1 注册扫描
三维激光扫描仪每一测站数据是以扫描仪位置和姿态有关的仪器坐标系为基准,三维模型的重构要求将不同测站的扫描数据变换到整体坐标系下,拼接成完整点云的过程称为注册扫描。扫描仪上的多种传感器起到初始布置扫描的作用,但需要进一步执行扫描注册以获得测站之间更精确的空间关系。注册扫描有3种方式,分别为基于目标注册、基于俯视图注册和基于云际注册。
基于目标注册适用于基于标靶的数据采集方式的测站,在测站之间均匀且高低有秩地架设3个靶球,完成数据采后,在SCENE软件中使用对象标记工具提取靶球,基于目标注册扫描将人工目标连接的不同测站拼接到一起。特殊地,利用升降机升高扫描仪,实现地面与屋顶点云的拼接,效果如图4所示。
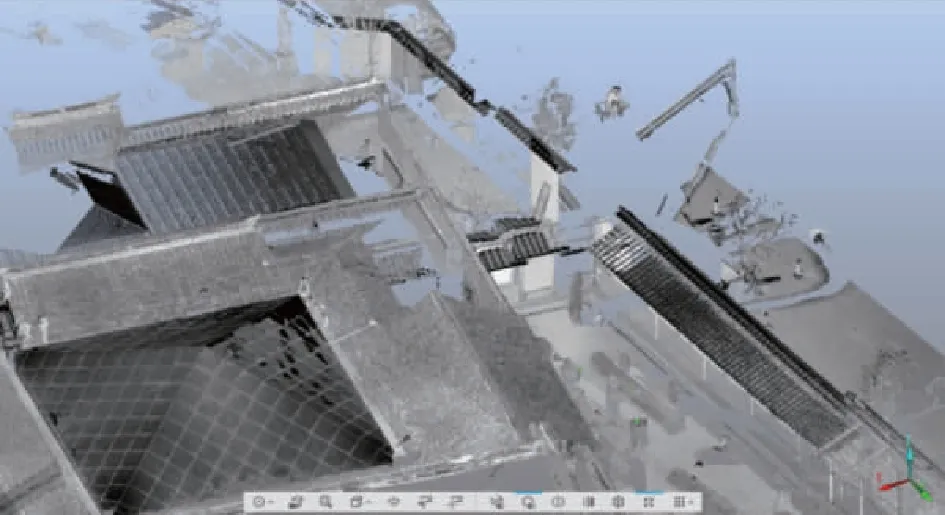
图4 地面与屋顶注册效果图
基于俯视图是最为常用的扫描注册方法,依赖扫描对象丰富的点、线、面等特征点,相邻测站有30%以上的重叠度,自动拟合特征点并计算出测站点云群集间近似的旋转平移矩阵,实现快速注册。
基于目标注册和基于俯视图注册是粗配准,相比前两者基于云际是精配准,基于云际注册扫描的前提是完成粗配准的预先注册扫描。通过最小二乘、最近点迭代等方法计算得到更加精确的旋转平移矩阵[10],实现较高精度注册的完整点云。
2.2 坐标转换
为了能与基础地形图接边,使其更好应用到测量领域,点云通常需要增加地理参考。将控制点坐标按规格录入测量数据外部参考文件,在SCENEN软件中将拼接好的点云数据锁定扫描,并在控制点所在的测站提取其位置,导入控制点坐标参考文件基于目标更新注册,软件平差算得转换参数,将相对独立坐标系下的点云转换到上海2000坐标下。
2.3 点云过滤
点云过滤包括数据降噪和抽稀,扫描时不可避免的存在噪声点,影响特征点拟合精度。基于多种过滤器对点云去噪,主要包括异常值过滤、深色扫描点过滤、离群点过滤和基于距离过滤。完成注册和坐标纠正之后,采用人机交互的方式进一步降噪,利用多边形、矩形选择器等多种方式手动选择噪声点,并将多余的部分剔除。
为防止点云切片转换二维图形的过程中因密度过大导致矢量数据模糊难以辨认模型,需要对点云抽稀。具体操作为:将点云数据导入CloudCompare软件,降采样进行抽稀处理。
3 基于激光点云的三维重建
测绘领域的三维重建通常需要参照实际,将点云转成建模软件支持的数据格式直接参照,或将点云切片,基于切片进行二维矢量制图,然后三维建模和纹理映射。
3.1 二维矢量制图
准确获取建筑物室内外截面信息是提取墙体轮廓线的基础。PointCab3.8软件是一款强大的点云数据处理软件,对多源点云在短时间内不受限制的生成平面图、剖面图的正射影像,生成CAD系统支持的切片文件。
建筑物二维矢量信息的提取主要包括建筑物平面位置关系和立面几何尺寸信息、内部细部几何尺寸和顶部水平位置投影线3个部分。对不同位置不同厚度的切片文件进行参照,依据建筑标准化制图化规范、结合设计师需求,利用AutoCAD软件平台的平面制图功能分别绘制出测区建筑物的平面图、立面图和剖面图。在清华山维EPS中利用点云数据很容易提取地形数据结合前面的平面图绘制总平图。
3.2 三维建模
将二维矢量图导入3d MAX软件,借助轮廓线进行实体建模。由于苏式庭院含有古建筑的屋顶,飞檐斗拱,建模相对复杂,使用Autodesk Recap将点云数据转换为*.rcs格式,导入3d MAX软件作为参考,在几何建模过程中将数以整体的部分作为群组,构造相同三维部分生成组件库,逐步构建庭院各部件白模,之后统一各部件的坐标系组成一个完整的苏式庭院模型。
3.3 纹理映射
纹理映射是生成真实感三维模型的关键步骤。在白模的表面赋予现实的纹理贴图可使模型更加逼真。通过映射增加了模型的质感。本文所使用的纹理贴完图示采集的建筑物的现场照片,通过Photoshop软件的剪贴、修图、亮度、色彩度平和等功能,统一贴图的色调,纠正纹理,给建筑物各部分指定材质,通过调整材质球参数实现透明贴图。
在3d MAX中通常利用UVW贴图,通过调整纹理的U、V、W参数使纹理的大小与几何表面相对应。图5为苏式庭院整体的三维实体模型。

图5 苏式庭院三维模型
4 精度分析
为了表征测量精度,确保成果符合规范,选择二维矢量图的尺寸误差和点云数据的点位中误差为精度分析指标。
(1)尺寸误差。为检验基于点云数据获取的建筑物尺寸信息的准确性,本文通过基于地面三维激光扫描的点云数据获取的建筑物尺寸Di与实地测量获取的尺寸Si进行对比,由公式(1)和(2)计算尺寸偏差。
Δi=Si-Di
(1)
E(Δi)=1/n·∑|Δi|
(2)
并以偏差统计的方式对建筑物二维信息的获取进行相对精度评定(表1)。
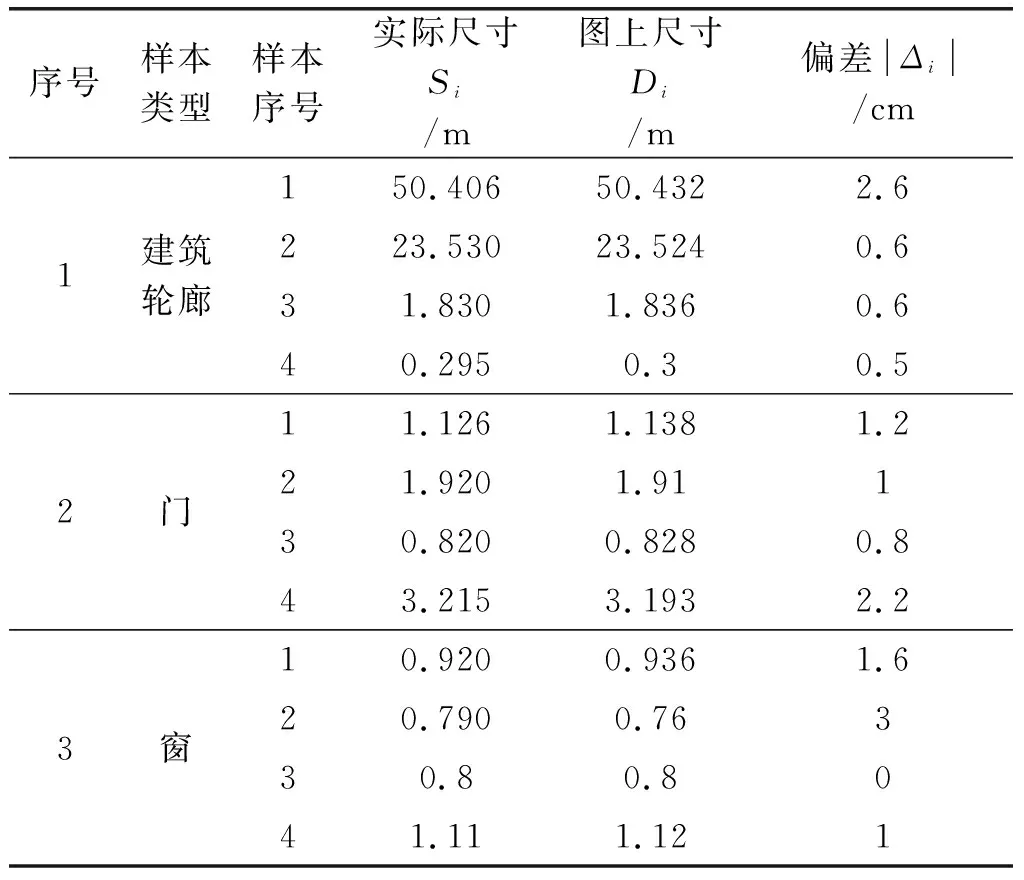
表1 平/立/剖绘图精度评定统计表
由表1可知,通过对12个样本尺寸的统计,基于地面三维激光扫描和点云切片二维信息提取和绘图的精度平均可达1.3 cm。
(2)点位中误差。选择均匀分布在测区的11个同名检核点,通过RTK和全站仪实测坐标并记录到“实测坐标”栏,然后在点云模型中获取同名点的全局坐标,并记录到“扫描仪坐标”栏,接着逐个计算二者的X、Y、Z差值ΔX、ΔY、ΔZ。计算结果如表2所示。
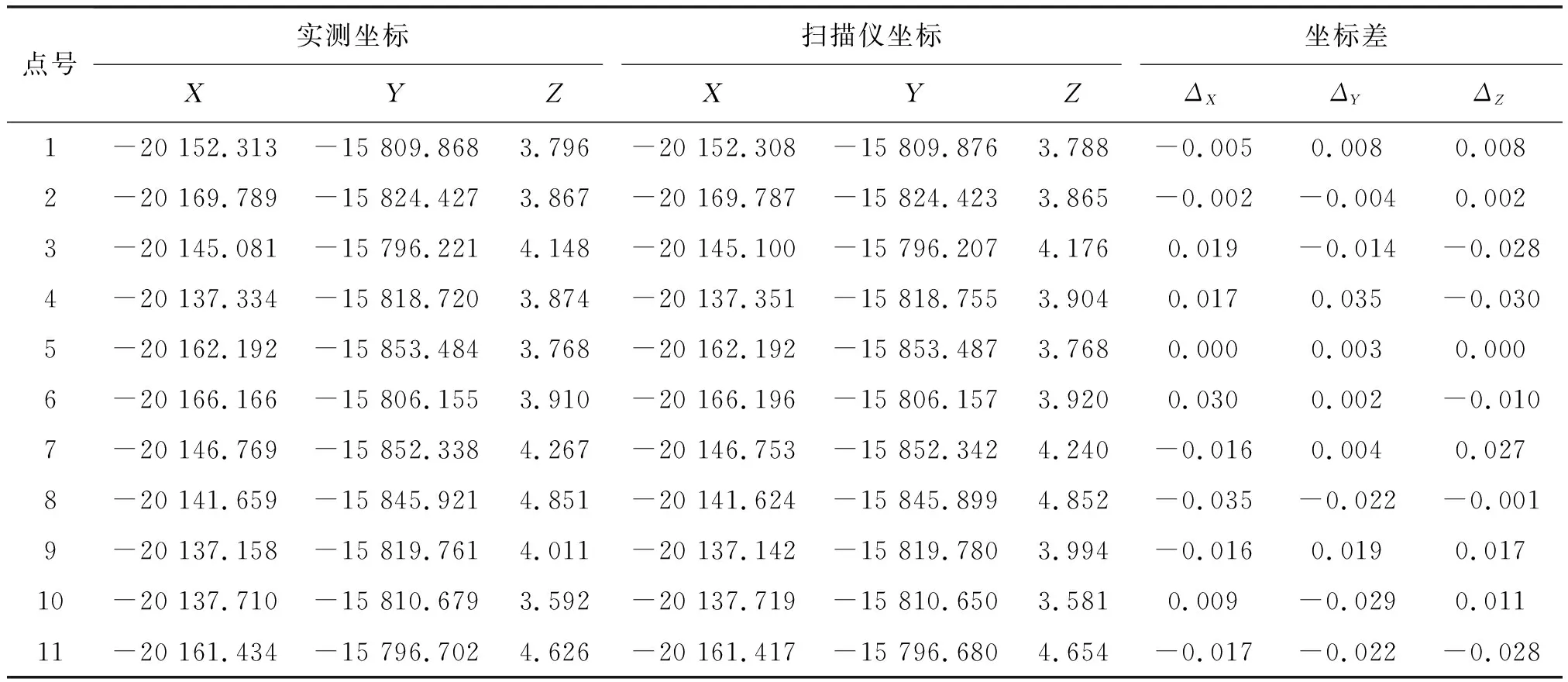
表2 实测与扫描仪同名点坐标对比单位/m
选取扫描区均匀分布多个同名检核点评定点云数学精度,计算公式为:
(3)
(4)
(5)
(6)
式中,σX、σY、σZ为同名检核点在X、Y、Z轴方向上的中误差;n为同名检查点数目;σ为平面中误差。
通过计算得:检核点的平面位置中误差为±2.5 cm,高程中误差为±1.9 cm。由评定尺寸误差和点位中误差结果可知,点云平面位置及高程精度均满足《工程测量规范》主要建(构)筑物平面点位中误差±5 cm,高程中误差±2 cm要求,基于此点云绘制的建筑物平、立、剖面图结果可靠,是获取庭院建筑内部结构和位置布局行之有效的方法,完全适用于三维建模的底图参考,使得模型具有更高的可靠性和真实性。
5 结 语
本文采用地面三维激光扫描仪获取了庭院室内外数据,并根据扫描对象不同特征选择特定的采集方式,利用升降机平台将扫描仪架设到空中,采集了测区相对完整的点云,方便后续二维矢量数据制作和建模,弥补了地面三维激光扫描仪扫描时建筑物顶部信息缺失严重的不足,为采集建筑物死角信息提供了新方法。通过外业数据获取、内业数据处理、基于激光点云的三维重建和精度评定四大环节的研究,验证了采用该方法对苏式风格庭院建筑三维建模效果理想,符合规范。与传统的测绘方式相比,地面三维激光扫描技术降低了外业作业强度,将测量的难度转移到内业的数据处理环节[9]。但是,本文为了得到建筑物较为详细完整的信息,测站数较多,增加了内业的工作量,如何用更少的测站得到更完整的信息以及如何利用多源点云数据建立三维模型并展示发布,是后续进一步的研究方向。
猜你喜欢
地理空间信息(2022年11期)2022-11-26
华人时刊(2022年5期)2022-06-05
现代苏州(2022年8期)2022-05-25
少儿美术·书法版(2021年12期)2021-10-24
模具制造(2019年3期)2019-06-06
测绘学报(2018年10期)2018-10-26
城市勘测(2018年1期)2018-03-15
新课程研究(2016年21期)2016-02-28
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20