
无人机LiDAR技术在矿区大坝监测中的应用研究
2022-01-22 08:59王君杰王雁昕
矿山测量 2021年6期
孙 健,王君杰,王雁昕,丁 奥
(1.山东科技大学 测绘与空间信息学院,山东 青岛 266590;2.淮安市水利勘测设计研究院有限公司,江苏 淮安 223005)
水库大坝是保障国民经济的重要基础设施,由于建设规模大、工作条件特殊复杂,运行过程中存在潜在的重大安全风险,一旦失事将威胁上下游人民生命财产安全。我国已有水库中约有36%属于病险水库,为保证水利水电工程的安全运行,必须加强水库大坝的安全检测[1-2]。在传统大坝监测过程中,主要采用水准仪、经纬仪、全站仪等仪器,根据监测需要在实地建立观测站,采用大地测量方法对大坝的变形情况进行监测。虽然采用这些传统技术方法也能满足项目的需求,但其测量效率低,测量周期较长,受天气因素的影响较大。随着测绘技术的不断发展,近年来开始采用高精度GPS单体网、区域网和合成孔径雷达差分干涉测量技术等进行大坝表面变形监测。这些观测手段受时间、空间等因素的限制,存在工作强度大、耗费大等缺点,很难反映大坝复杂的整体变形形态。
无人机LiDAR(Light Detection and Ranging)技术凭借其高精度、高效率、高分辨率、高密集点云数据、穿透性强等优势,已成为地理信息获取的重要手段。借助其多次回波反射特性,依托点云分类算法能得到去除地表树木、房屋等附着物[3-5],表征真实地面高程的高精点云数据,以此可构建大坝的数字高程模型[6]。该系统通过集成全球定位技术、激光扫描技术等多种测量手段,可以快速地获取地面精密点云数据[7-9]。通过对点云数据进行精度检查、点云滤波以及点云分类等预处理流程后,获得高精度的大坝三维模型。本文结合陕西省某矿区大坝变形监测项目,探索采用无人机LiDAR技术进行矿区大坝监测的可行性,以期为大坝变形监测提供一种新思路。
1 无人机LiDAR系统
1.1 无人机LiDAR系统组成
无人机LiDAR系统以无人机为载体平台,结合时间同步控制单元系统,集成全球导航卫星系统(Global Navigation Satellite System,GNSS)、激光测距系统(Scanning Laser Ranging,SLR)、惯性导航系统(Inertial Navigation System,INS)等设备于一体,可同步获取高精度无人机激光雷达点云数据,快速生成DSM、DEM、彩色点云等成果。该系统将激光发射向地面,记录下激光脉冲到地面往返的时间;根据这个时间结合光速计算出距离,系统再根据飞机高度、姿态以及脉冲角度,计算出地表物体的高度;同时,根据GPS接收器的信息,最终得到地面物体的空间坐标。无人机LiDAR系统工作原理如图1所示。
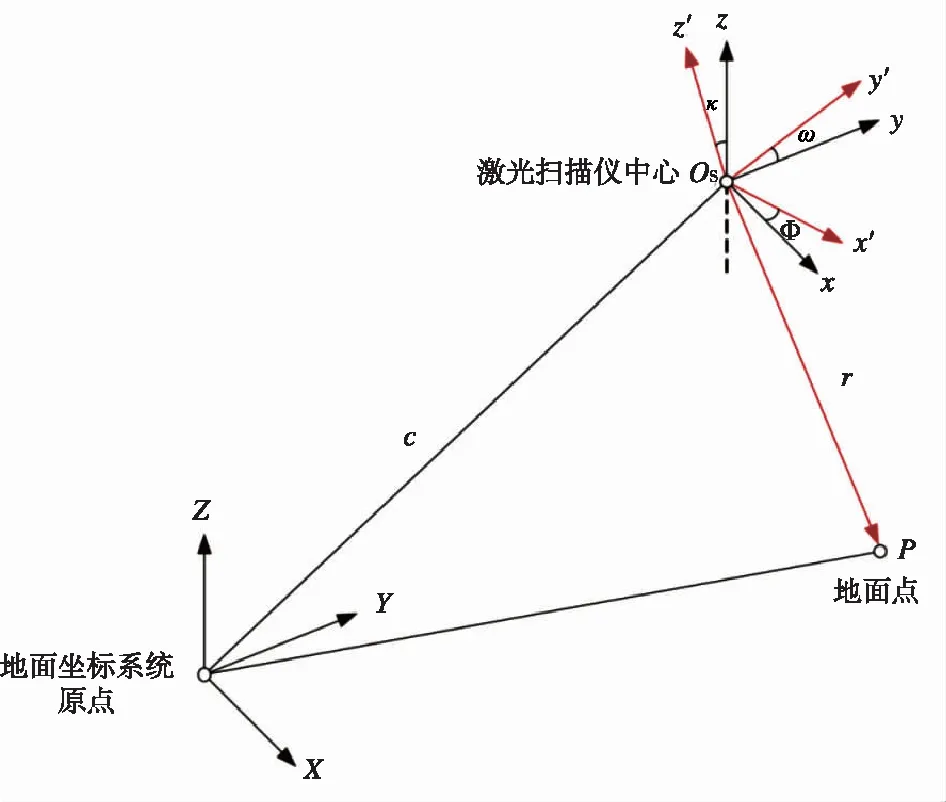
图1 无人机LiDAR系统工作原理示意图
1.2 无人机LiDAR系统监测方案
由于监测区域为矿井采空塌陷区,在大坝表面布置监测用标识点,根据其地表地形特征,采用监测扫描控制点及测站点方式进行大坝变形监测。同时,在大坝坝顶架设地面基准站,同步采集GNSS观测数据。本次实验采用大疆DJI M600 PRO搭载轻量化LiDAR系统对大坝进行作业,该系统的主要性能参数如表1所示。
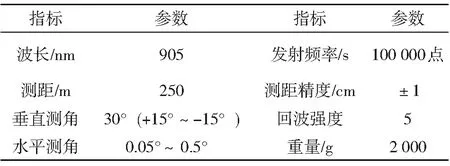
表1 无人机LiDAR系统参数
2 LiDAR点云数据处理
2.1 LiDAR点云数据处理技术路线
采用无人机LiDAR系统完成外业测量后,为实现地面高精度、高密度点云获取,需对原始数据进行处理,主要包括点云数据处理与地面点云提取两部分,具体点云数据处理流程如图2所示。
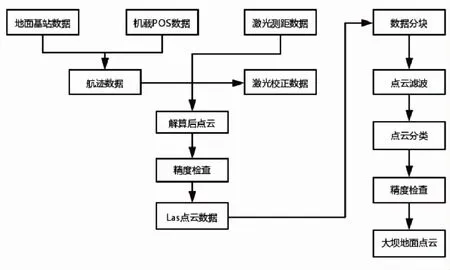
图2 无人机机载LiDAR点云数据处理技术路线
2.2 LiDAR数据预处理
由图2可知,LiDAR数据预处理阶段主要包括航迹解算和点云生成两个步骤。航迹解算是根据机载的GPS接收机和惯性导航系统确定无人机测量作业过程的航迹和姿态。为了保障航迹解算的准确性,在矿区坝顶地面架设基准站,根据地面站观测到的GNSS数据和无人机GPS接收机存储的信息解算飞行航迹,GNSS数据与IMU数据融合解算获取无人机的姿态信息。
获得无人机的航迹与姿态信息后,将激光扫描数据按时标与无人机的航迹和姿态进行匹配,然后检查坝面点云重叠率是否符合要求。三维点云数据是后续模型建立以及剖面分析的基础,为了确保点云成果的可靠性,在点云生成后需要考虑安置角和标定误差角,从而获得高精度的三维LiDAR点云数据。
2.3 渐进加密三角网LiDAR点云滤波算法
经典渐进加密三角网(PTD)滤波算法的步骤是选取局部窗口内的最低点作为初始地面种子点,以此构建不规则三角网[10-11]。由于机载LiDAR在扫描过程中存在多路径反射的特性,使用该算法构建三角网模型时可能会低于真实地面。为了提高LiDAR点云滤波的效果,本文在构建初始三角网阶段,对点云数据中未被分类的点进行判断,记为待判断点。遍历所有待分类的点,查询各点水平面投影所落入的三角形,计算点到三角形的距离及点到三角形三个顶点与三角形所在平面所成角度的最大值。将其分别与迭代距离和迭代角度进行比较,如果小于对应阈值,则将此点判定为地面点,并加入三角网中。重复上述过程,直至所有地面点分类完毕。
3 应用实例
为验证本文方法的有效性,将陕西某矿区大坝作为典型对象,根据大坝的自身情况及周围环境条件,采用无人机LiDAR系统对矿区大坝进行精确定位的高效率、高分辨率的扫描,扫描时间分别为2019年11月和2020年9月。为生成大坝区域高精度的DEM和DOM成果,对获取的LiDAR点云数据进行深化处理,并构建大坝剖面模型与高差模型,从而完成矿区大坝变形监测。
3.1 大坝模型剖面提取
原始数据经过位置姿态数据解算和点云融合处理后,对LiDAR数据进行点云分类及过滤,剔除数据中由于植被、交通指示牌、过道、护栏、观测墩、花台等坝体附作物造成的伪数据并进行精度检查,最终获得需要进行分析的点云数据。利用地理空间数据建立数字高程模型,并生成DEM文件。在大坝表面三维激光扫描数据的基础上,构建两期大坝剖面模型,如图3、图4所示。大坝模型跨度为210 m左右,在0~105 m范围内为大坝上游,在130~210 m范围内为大坝下游。
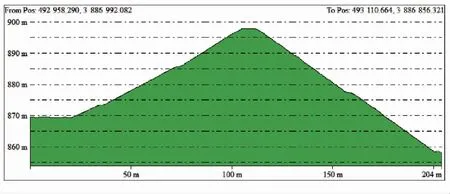
图3 2019年某矿区大坝模型剖面图
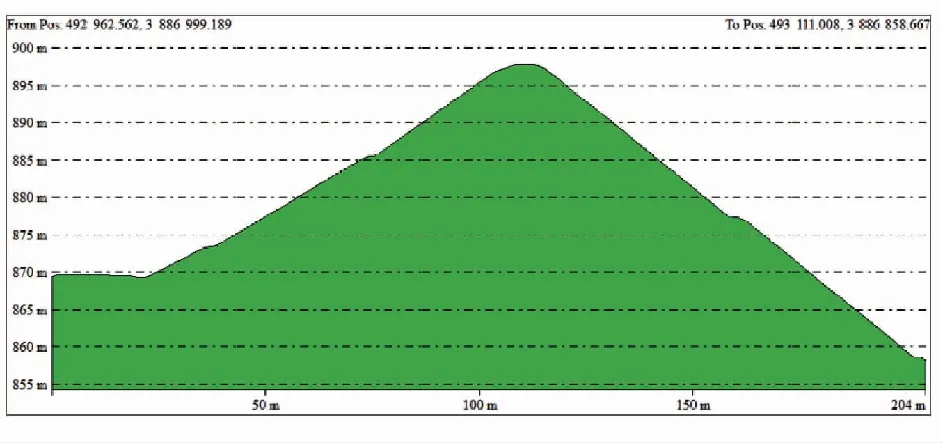
图4 2020年某矿区大坝模型剖面图
3.2 大坝整体变形分析
得到两期矿区大坝模型剖面图后,统一坐标基准进行叠加分析,就可以得到大坝变形值,大坝剖面高差模型如图5所示。
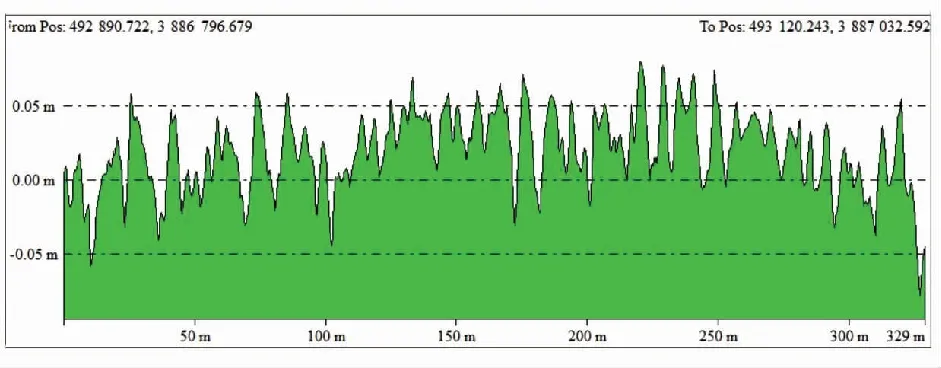
图5 高差模型剖面图
通过分析,得到以下结论:
(1)通过高差模型显示,大坝上游坝面变形量相对较大,下游坝面隆起现象较为明显。大坝绝大部分区域没有出现严重的变形情况,这可能跟两期监测时间间隔较短有关。
(2)矿区大坝两期数据叠加之后存在正负之分,即矿区大坝存在明显的沉降和隆起迹象,且在大坝下游区域中,可能是因为长期遭受大车碾压,部分交通道路出现沉陷,和实际情况吻合。
3.3 LiDAR点云数据相对精度分析
相对精度主要表示为两期数据间的精度,该精度决定不同的期数间数据的相互吻合性,以保证多期数据成果的正确性。点位中误差表示点位精度的一种数值指标,用ΔD表示。通过同时期采集得到的距离测站约100 m范围内的两组点云数据进行滤波,剔除数据中由于植被、交通指示牌、过道、护栏、观测墩、花台等坝体附作物造成的伪数据,得到坝面点云文件。在大坝表面三维激光扫描数据的基础上,构建大坝两期模型,在相对测点的同一位置切取两个剖面。提取两组数据中检测点位的对应坐标,两组数据相同点位的坐标差异如表2所示。
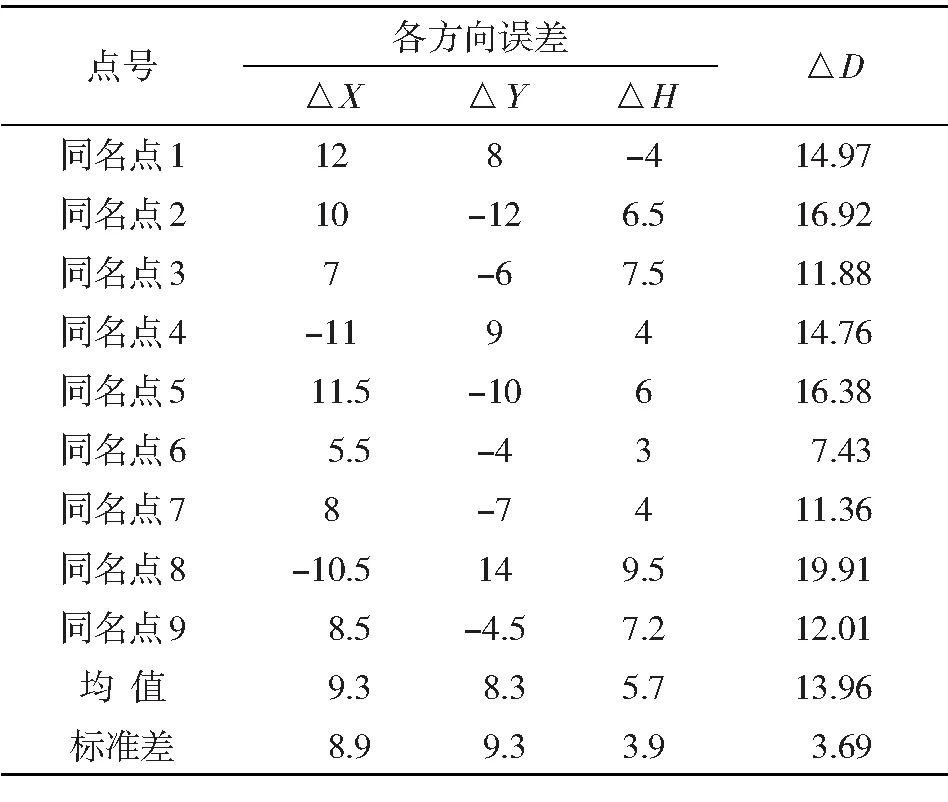
表2 相同位置剖面线坐标差值表/mm
通过对表2分析可知,相对精度的误差在2 cm以内,误差标准差为3.69 mm,且各方向标准差均小于10 mm,成果稳定性较佳。上述指标满足《机载激光雷达数据获取成果质量检验技术规程》(CH/T 3023―2019)规定的精度要求。由于激光扫描得到的点云中地面存在一定的厚度,导致上述误差的存在。
3.4 LiDAR点云数据分析
由图5可知,该大坝有明显的沉降和隆起迹象,通过点云滤波及点云分类,将无效数据剔除,得到坝面观测点云文件。从两期点云数据中,沿水准路线截取相同位置的坝顶点云数据,并沿大坝走向等间距选取多个点进行变形分析,如表3所示。
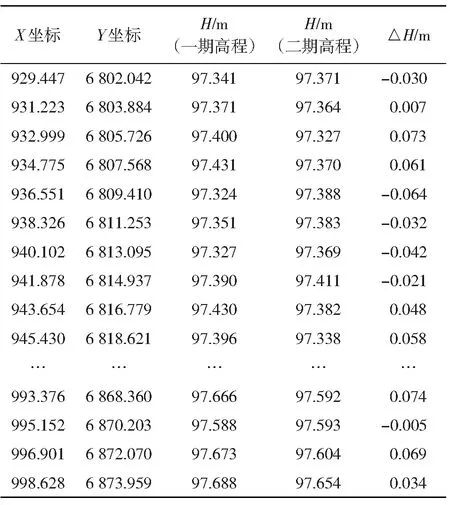
表3 提取点变形分析
矿区大坝垂直位移变化趋势如图6所示,蓝色为点云数据、红色为水准测量数据。
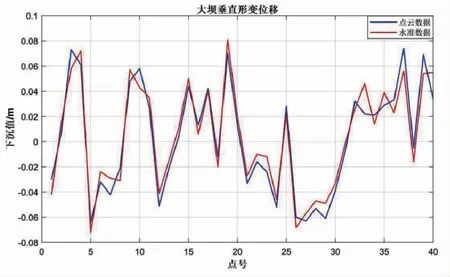
图6 大坝垂直位移形变图
为提高工作效率以及验证监测结果的精度,以25 cm点距对地面点云抽稀,使得在减少点云数据量的同时,保证点云数据应用时的流畅性并保留对地形特征表达的准确性,将监测结果与坝顶的水准测量结果进行比较,精度验证情况如表4所示。
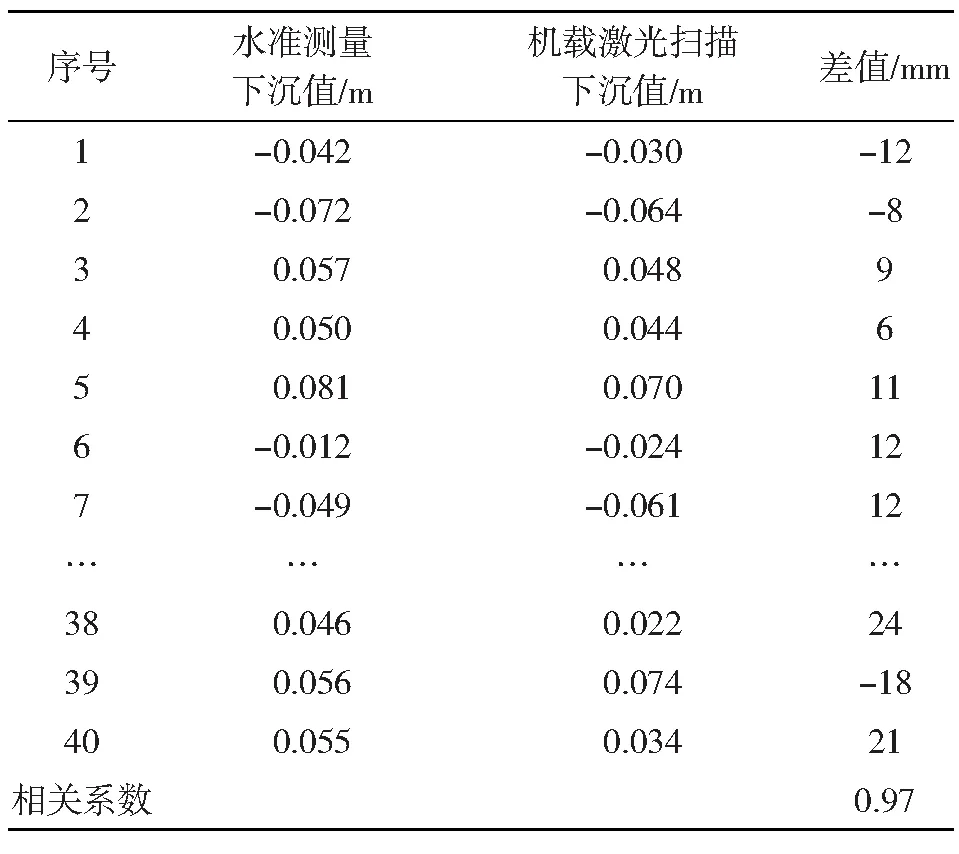
表4 水准测量与机载激光扫描对比结果
通过对表4分析可知,在本项目开展过程中,机载激光扫描数据与水准数据较接近,相关系数达到0.97,点云绝对精度误差均值为12 mm,中误差为13.56 mm,点云高程精度满足《机载激光雷达数据获取技术规范》(CH/T 8024-2011)规定的高程精度要求,可为大坝整体变形监测提供有效的技术手段。
4 结 论
(1)通过对比矿区大坝不同时期的三维点云数据,可以较准确地分析出大坝的沉降、隆起等变形迹象和变化趋势,为保障大坝区域范围内人民生命财产安全提供了有效的技术手段。
(2)为了验证监测结果的正确性,将监测结果与坝顶的水准测量数据进行比较,两者相关系数达到0.97。且在点云相对精度、绝对精度误差方面,LiDAR点云数据质量符合设计要求。但由于目前监测周期较短以及同名点个数较少,点云数据精度有待提高。
(3)与传统单点变形监测相比,应用无人机LiDAR技术进行大坝表面沉陷变形监测,能够在短时间内获取高精度、高密度点云数据,从而快速获取大坝的三维观测模型和高差模型等成果,弥补了其缺乏线性变形及整体变形特征的不足。
(4)采用无人机LiDAR技术获取大坝整体点云数据并生成DEM,具有较高的分辨率并能较真实的呈现大坝区域的地表形态,可为进一步研究大坝坡度、坡向、沟壑水系等地貌特征提供依据。
猜你喜欢
国外核新闻(2022年7期)2022-11-25
导航定位学报(2022年5期)2022-10-13
农业工程学报(2022年8期)2022-08-08
一重技术(2021年5期)2022-01-18
百科知识(2018年6期)2018-04-03
新商务周刊(2017年2期)2017-12-25
少儿科学周刊·少年版(2016年4期)2017-02-15
华人时刊(2016年16期)2016-04-05
职业·中旬(2009年12期)2009-06-01
