
公路路面3D数字化摊铺施工装备及应用技术研究
2022-01-20 01:39:24王芮文欧定福
工程与试验 2021年4期
王芮文,曹 妍,欧定福
(1.江苏省交通技师学院,江苏 镇江 212028; 2.江苏森淼工程质量检测有限公司,江苏 镇江 212028)
1 装备的原理
1.1 装备的构成
3D数字化智能控制施工技术装备主要由测量机器人(ICR80智能型高精度1″全站仪)基准站和施工自动控制系统组成[1]。
对于测量机器人的配置,单机摊铺时跟踪机器人不应少于2台,检测机器人不应少于1台;双机联铺时跟踪机器人不应少于3台,检测机器人不应少于1台。测量机器人应内置马达,并满足抗高温和耐磨损要求,换面速度快而稳定。测量机器人测角精度1″以上,测距范围不小于1500m,测距精度1mm+1.5ppm以内,导向光工作范围150m以上。另外,测量机器人具有RS232、蓝牙和USB等多种接口。
在进行摊铺时,还需要360°棱镜。对于棱镜,必须保证不变形,能正确反射不同方向入射的光信号。同时,因需要实现测量的动态控制,因此,当水平方向上设定可反射入射角的范围较广,从0°至360°,而在垂直方向上,可调节的反射入射角是在仪器量测范围内的-50°至+50°。纵横方向的定位精度在5mm以内,自动识别和锁定状态的测程不小于600m。
对于倾角传感器,其防护等级IP65以上,量程范围不小于±10°,分辨率不低于0.02%。这里需要强调的为零点稳定性,其影响着整体测量结果,应大于0.2%为宜。线性度的控制也需要进行适时调整,幅度应保持在±0.2%以内。防振级别应满足摊铺机振动状态下的测量精度要求。
用于3D摊铺的通信电台应保证防护等级IP65以上,数据传输模式具有RS232模式和蓝牙模式,天线的带宽、增益、频率和功率应满足测距范围内数据的高速与稳定传输要求。
主控制器应满足防护等级IP65以上,且具有高亮度、高分辨率显示功能,能在背光及强光条件下清晰显示,允许电压波动在±10%以内,串口应能适应不同摊铺机串口接入标准,并具有可写入功能。
3D摊铺辅助软件应具有录入设计数据、里程桩坐标的功能,应能进行3D建模,并输出里程桩坐标文件、施工线形文件、施工模型文件及检测模型文件。应能够对量测信息实时采集、处理、分析,将实测高程与设计高程比对,生成高程修正信息并传输至摊铺机找平系统。另外,还应能够记录、储存施工参数信息,生成摊铺质量报告。
1.2 工作原理
3D数字化摊铺完全由自动化系统完成。在系统持续控制摊铺机时,测量机器人会通过测量系统的后方交会数据来确定摊铺机所在位置和自身所处位置,根据摊铺机上棱镜反射的数据,进行摊铺参数的计算。也就是测量机器人会通过设计数据(事先输入到测量机器人的电脑中)与现场实测数据的比较来进行摊铺机的调整,从而进行高程的修正和摊铺参数的控制。当原始地面出现坑洼导致摊铺机车身发生倾斜时,系统安装在桅杆上的倾角传感器实时地对车身的姿态进行校正,使摊铺机车身的姿态始终与设计面相吻合,进而确保系统的稳定性,真正实现精准摊铺[2]。
2 3D摊铺装备布设与安装
用于捕获360°棱镜三维坐标的跟踪机器人应架设于摊铺机机身外两侧。在摊铺机已经摊铺过的后方路面上,还需要布设一个检测机器人,其作用是对摊铺后的质量参数(如高程和横坡)进行检测,如图1所示。
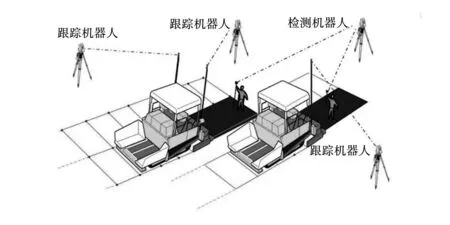
图1 跟踪机器人与检测机器人布设
桅杆应垂直安装于摊铺机的大臂上,且与摊铺机提升油缸间的距离控制在30cm之内,360°棱镜固定于桅杆顶端。在摊铺机的熨平板上,还需要布设检测路面横坡度的横坡传感器。安装在摊铺机桅杆上的倾角传感器是确保摊铺机能保持水平的关键,通信电台应安装于摊铺机的顶部。在摊铺机的醒目位置和方便操作、维修与线路检修的位置(如驾驶室的下部无遮挡处),可以安放主控制器和集线盒。
3 工作流程
3.1 下承层数据采集
路面的摊铺质量与下承层关系密切,为了使摊铺的高程准确,需加密标高控制点,纵断方向上,直线段10m,曲线段5m,每断面设置3个点。
3.2 车载设备的安装与校准
车载设备(1台摊铺机)的安装包括8个部分:桅杆2个、360°棱镜2个、主控制器1台、控制手柄2台(Moba)、测量横坡度的横坡传感器1只、桅杆传感器2只、车载电台2台、接线盒以及连接线缆等,如图2所示。

图2 部件布置
桅杆安装在摊铺机的大臂上,尽量靠近熨平板,一般距离为19cm。棱镜安装于桅杆顶端,固定好,用于返回测量机器人发出的信号,跟踪机器位置,或者在后方用于检测。
桅杆传感器安装于左右桅杆两侧,用于检测桅杆的倾斜状态和地面坡度的夹角,然后进行倾斜补偿。
蓝牙电台安装于摊铺机顶棚上,测量机器人上的蓝牙手柄与蓝牙电台进行配对,可以将测量机器人测量的数据信息通过电台传递给MPC面板。
在熨平板的上方,设置横坡传感器,主要检测和控制摊铺机熨平板和机身的倾斜状态,并随时测量坡度值,然后将此信息传递给面板,对摊铺机熨平板的姿态进行校准。
主控制器安装于摊铺机上便于操作的地方,先把设计数据导入此控制器中,通过接受全站仪发送的信息,控制器对机器的“设计”数据和实测数据进行计算,然后,通过数据传输系统,将测量机器人发出的高程修正信息、平面位置信息等传输给控制手柄。
为了便于接收控制输出信号,调节找平体系,在摊铺机的边侧控制箱附近,需要安装Moba控制手柄,可以设定摊铺机的工作状态(一般选为3D),进行灵敏度设置、液压模式设置、显示传感器的调节状态向上还是向下。
接线盒安装于摊铺机上方便于布线的位置,一般分为左右接线盒,其主要作用是收集、传输数据,将左右桅杆传感器的数据传递给控制器。
各个设备之间的通信是通过连接线缆实现的,各设备之间的连接见图3。

图3 辅件连接
各设备安装结束后,需要对如图4所示的8个数据进行测量校准,并将数值输入主控制器中,此数值将作为该机器的几何尺寸保存在主控制器中。校准前,机器水平放置,需在熨平板下垫20cm木方,调整进料仰角,使机器保持在摊铺工作状态。另外,为了使系统的测量精度满足规范要求,需要把左右桅杆调到竖直状态。

图4 控制面板
数值1、5为桅杆距提升油缸的距离,2为两提升油缸之间的距离,3、7为左右桅杆的高度,4、8是熨平板后侧方至桅杆临近面之间的水平距离,6表示熨平板总宽度。
3.3 设备操作注意事项
检查检测机器人与360°棱镜间的通视性,为避免施工干扰和减少换站次数,检测机器人与360°棱镜间的距离宜控制在350m以内。
开启主控制器,打开模型数据文件,将跟踪机器人切换至机械控制模式,自动跟踪棱镜。
摊铺机行进的前3m~5m进行摊铺数据校验,当摊铺精度达到规定要求后进入自动控制摊铺。
摊铺过程进行数据校验,控制标准按规范执行。摊铺结束后需要进行摊铺质量验证与处治,并编制摊铺质量报告。
为了使摊铺质量控制更加有效,需要在正式摊铺前进行试验段的仪器设备验证,正式施工的数据应以此为据。单机摊铺时,用跟踪机器人追踪360°棱镜,结合横坡传感器,计算施工高程与设计高程偏移量,通过主控制器调整偏移量,控制3D摊铺系统进行施工。
当两台摊铺机协同施工联铺时,前方的一台摊铺机的行进与控制方法和单机摊铺的控制方法相同,而后方的摊铺机则需要注意,其内侧以前方的摊铺机工作面为基准,用接触式传感器来对高程进行控制,在其外侧,高程的控制方法是通过架设于后方的摊铺机桅杆上的360°棱镜来实现检测和控制。
摊铺过程利用架设于摊铺机后方的检测机器人对3D摊铺数据进行实时检测,并将检测数据与设计数据进行比对,如不满足设计要求,及时将检测数据传至跟踪机器人,跟踪机器人通过与主控制器数据交互,对摊铺机的熨平板进行实时调整,以保证摊铺高度。
转站时,在跟踪机器人自动跟踪半径150m范围内,利用摊铺机后方检测机器人进行交替转站。在实际施工中,一般应配备一台以上的备用机器人,其目的是用备用机器人来对需要转站的360°棱镜,这样,3D摊铺系统则会自动将新站作为控制站,从而实现施工的连续性,保证摊铺不间断。
3.4 摊铺质量的验证与处置
摊铺作业完成后应及时采集已摊铺路段数据,进行摊铺质量检测与验证。路面摊铺的质量检验评定应符合JTG F80/1-2017中的相关规定。摊铺质量检测方法及具体操作按JTG 3450-2019执行。
分段摊铺时,每段摊铺路面均需进行摊铺质量检测[3],最终摊铺质量检测数据应为施工路段范围内的全部检测数据。
如果在摊铺质量检查中发现缺陷或者质量隐患,需要扩大范围和频率检查。对于质量不过关的位置和参数,应进行维修补救,并将原始数据进行分析、汇总和保存。对采取过补救措施的部位要在检测报告中标明,不得隐匿。
4 装备的应用效果研究
摊铺完成后对摊铺质量进行稳定性分析,以检测数据的波动情况,反映摊铺的稳定性,绘制摊铺质量差值分布图。应绘制纵断高程、摊铺厚度、摊铺宽度及横坡度与设计值之间的差值分布图,并计算标准差,进行纵断高程、摊铺厚度、摊铺宽度及横坡度稳定性分析[4]。同时,绘制平整度分布图,并计算平均值,进行平整度稳定性分析。
4.1 纵断高程稳定性分析(理论值和检测数据验证)
路面摊铺完成后,需对纵断高程进行测量,分析使用了3D设备后,纵断高程与设计高程之间的波动大小,并绘制高程差值图和进行相应稳定性分析[5](如图5所示),按式(1)计算标准差:
(1)
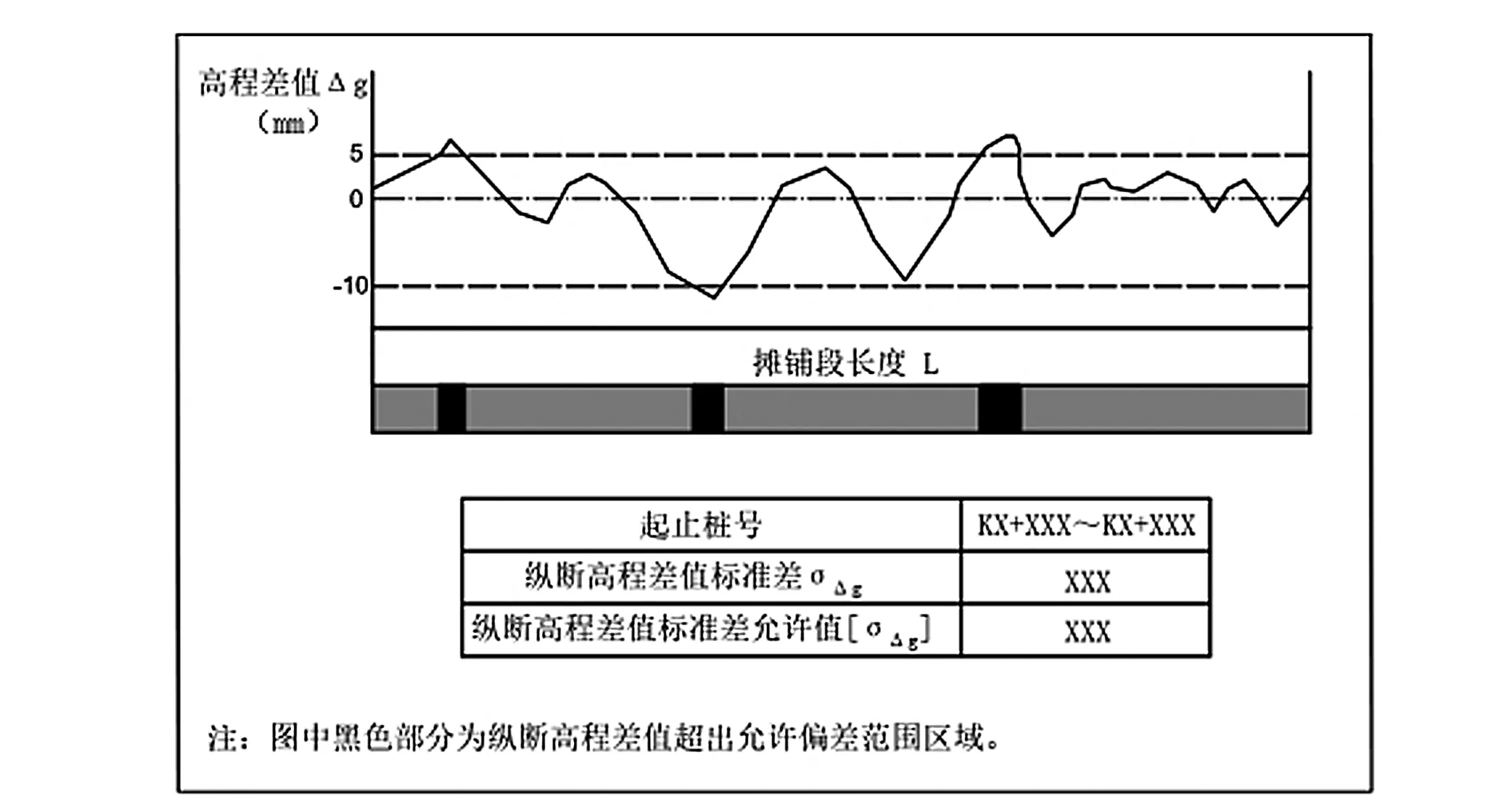
图5 纵断高程稳定性分析示意图
4.2 摊铺厚度稳定性分析
摊铺的厚度由取芯确定,取芯后两侧的实际厚度应与设计值和规范允许值进行比较,并计算和判断其稳定性,绘制摊铺厚度差值和具体的分布情况[6](如图6所示),按式(2)计算标准差:
(2)

图6 摊铺厚度稳定性分析示意图
4.3 摊铺宽度稳定性分析
摊铺结束后,按评价标准给定的方法进行路面宽度量测,并与设计宽度进行比较,绘制摊铺宽度的差值和其具体分布(如图7所示),按式(3)计算标准差:
(3)
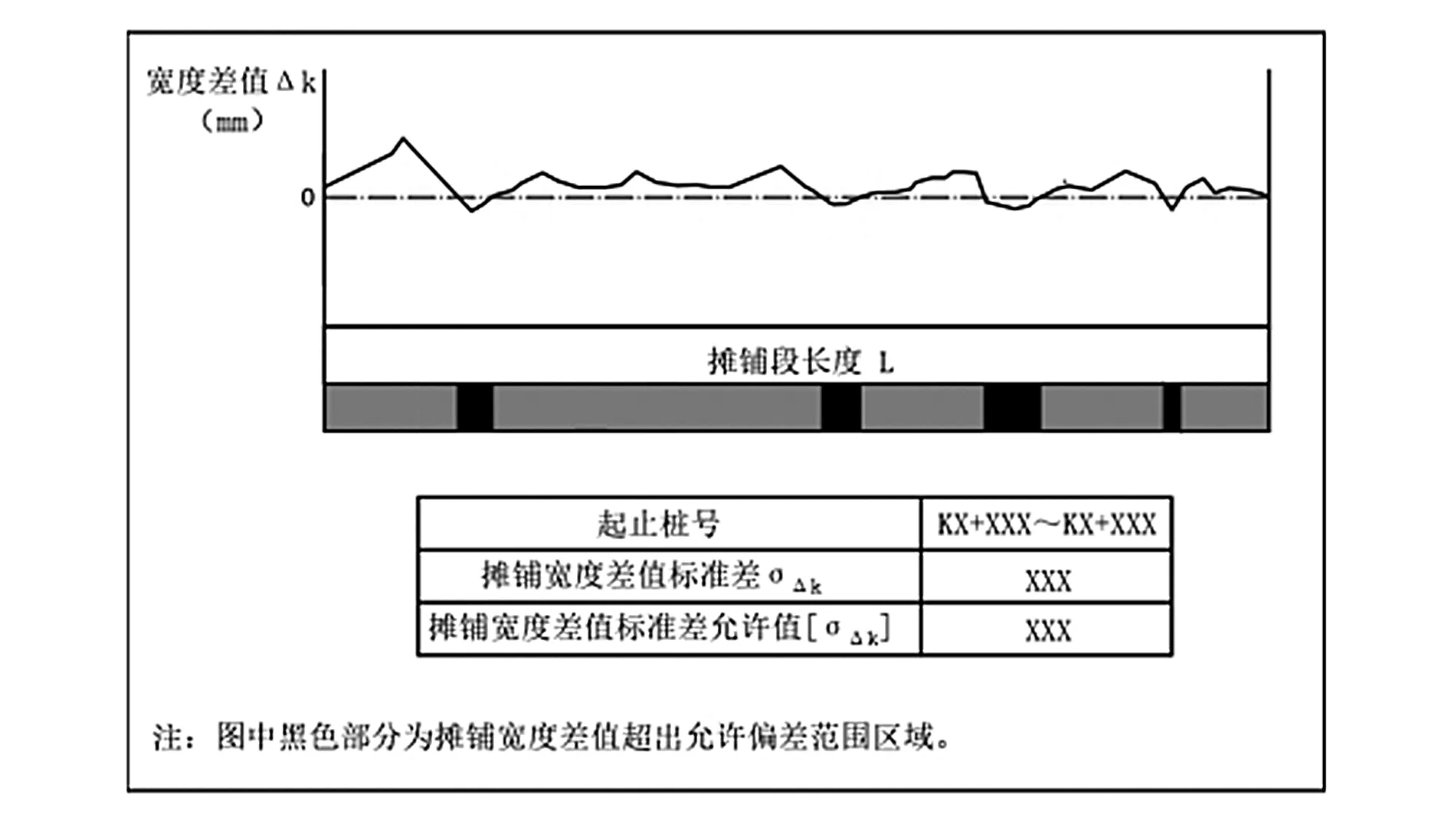
图7 摊铺宽度稳定性分析示意图
4.4 横坡度稳定性分析
横坡度的测量与高程测量同步进行,横坡度计算后,其应与设计横坡度比较,并绘制横坡度控制情况图(如图8所示),按式(4)计算标准差:
(4)
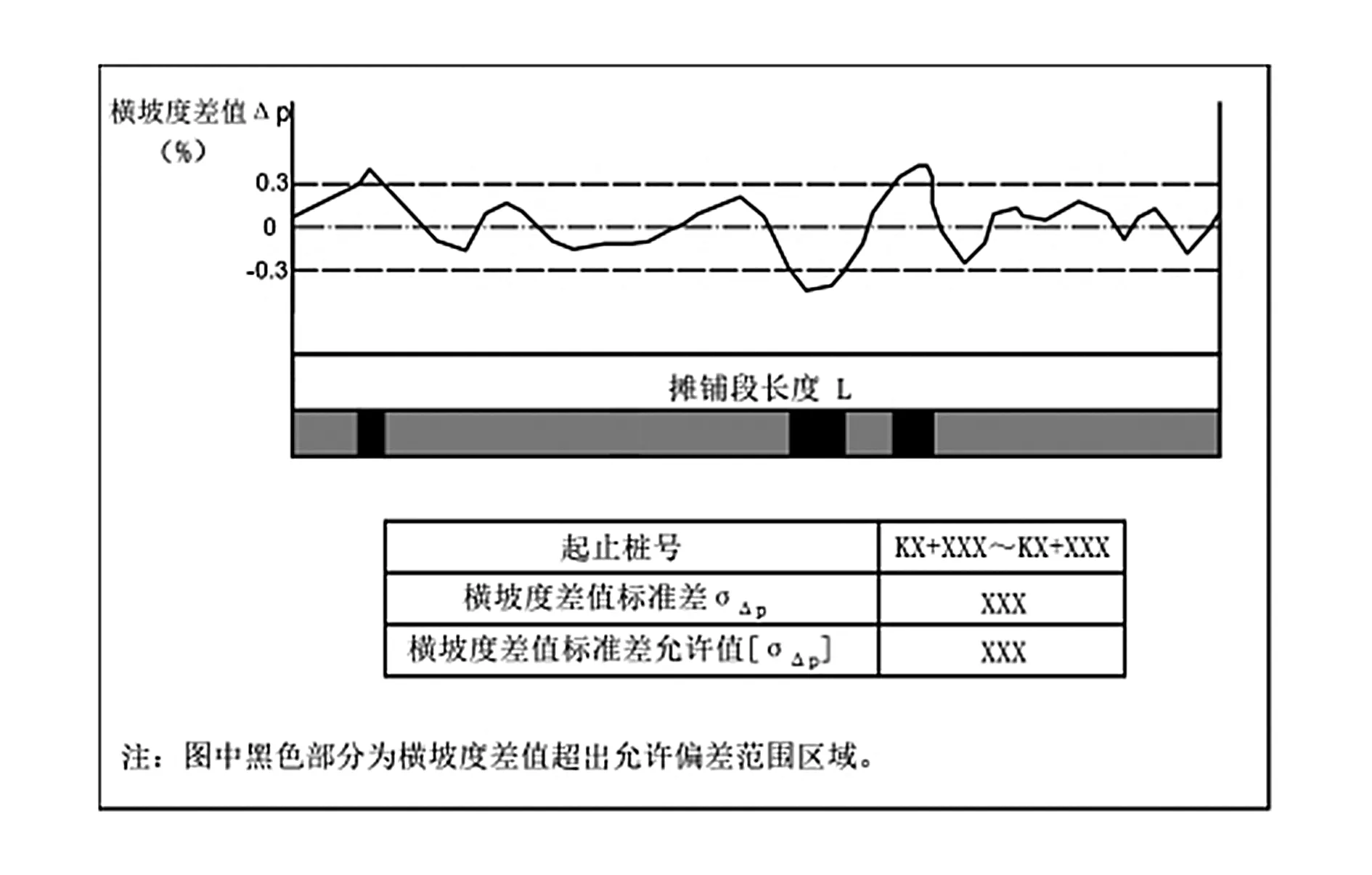
图8 横坡度稳定性分析示意图
4.5 平整度稳定性分析
按评定标准的要求方法进行平整度的测量,并计算其与规范的差值,分析其稳定性(如图9所示)。平整度均值应不大于平整度均值允许值:
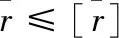
(5)
5 结 语
3D数字化技术装备在公路路面摊铺中的应用,不仅可以提高劳动生产率,消除安全隐患,还可以利用现代信息技术的多方优势提升工程质量,节约工程成本,该技术值得推广应用。
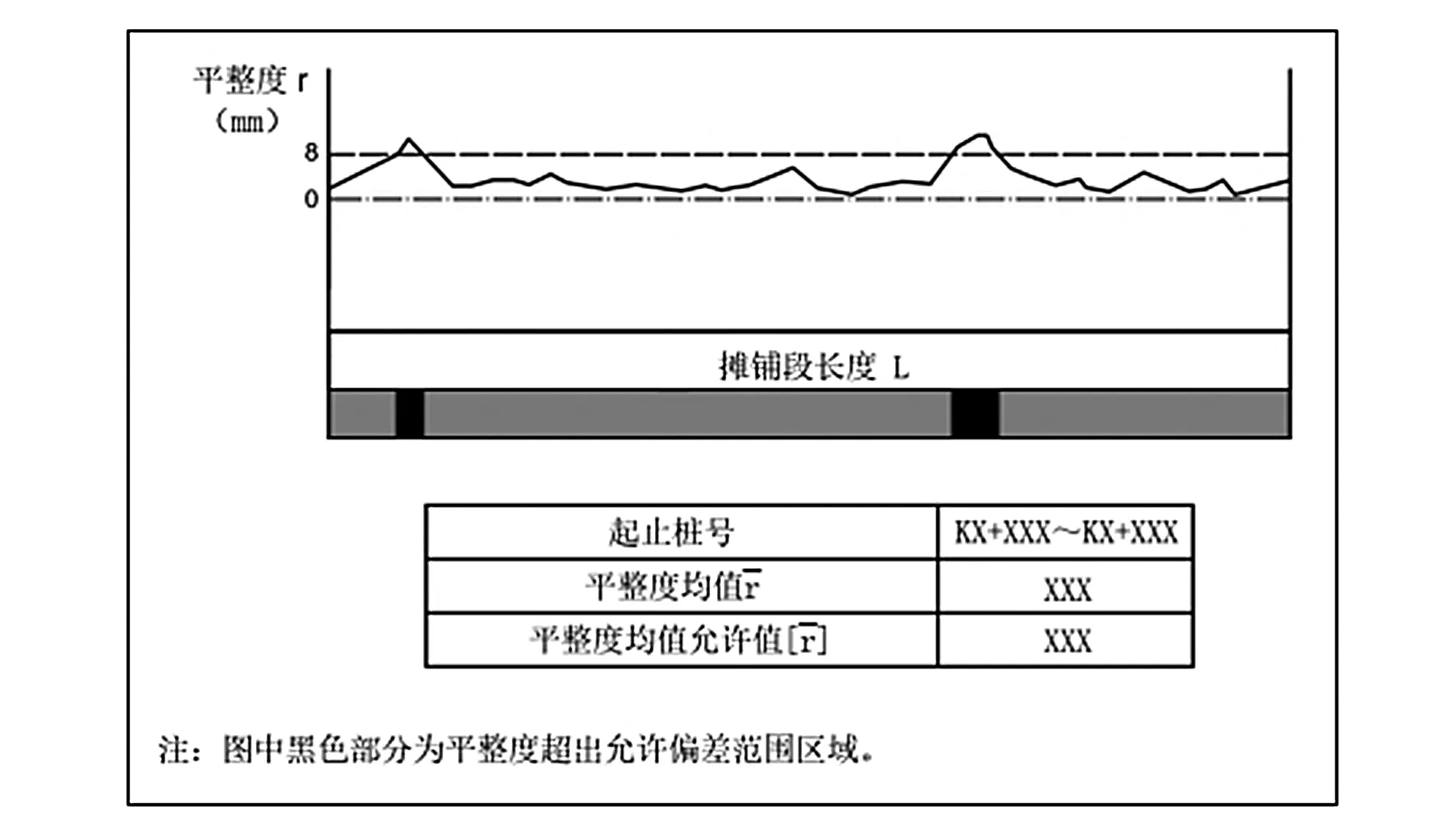
图9 平整度稳定性分析示意图
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18 09:02:36
阅读时代(2021年6期)2021-09-10 07:22:44
东方少年·快乐文学(2020年8期)2020-10-20 06:20:11
少儿美术(快乐历史地理)(2020年4期)2020-02-24 13:06:28
学苑创造·A版(2019年4期)2019-05-10 00:19:52
石油化工建设(2016年6期)2016-02-27 15:03:26
石油化工建设(2015年6期)2015-12-01 04:17:31
物理实验(2015年8期)2015-02-28 17:36:41
筑路机械与施工机械化(2014年8期)2014-03-01 03:01:06
筑路机械与施工机械化(2014年5期)2014-03-01 02:59:22
