
单臂带电作业机器人的设计与分析
2022-01-18 09:58:20应永灵沈贝石徐晨杰陈杰辉刘晓宏
大科技 2022年4期
应永灵,沈贝石,徐晨杰,陈杰辉,刘晓宏
(1.慈溪市输变电工程有限公司,浙江 慈溪 315300;2.浙江鼎顺电气科技有限公司,浙江 慈溪 315300;3.湖南帝星智能科技有限公司,湖南 长沙 410100)
1 背景
配电线路进行不停电检修是近年来电力设备检修的趋势[1]。目前,传统的配电网带电检修主要由人工进行[2-3],大多是工人穿戴绝缘屏蔽服站立高空绝缘斗中进行作业,劳动强度大、工作效率低且危险系数高[4]。为了克服人工带电作业的危险和不足,带电作业机器人作为智能电网建设的新兴技术,已经是配电网带电作业领域重点研究的课题。目前国内外带电作业机器人大多采用两个机械臂来模拟人类双手的动作,但双臂带电作业机器人由于高空作业平台最大承重的限制,机械臂的臂展短,并且双臂需要协调控制,对控制的精度要求高,从而造成产品生产成本高,成为广泛使用的阻碍。针对我国配电线路的特点以及带电作业工艺要求,研制了单臂带电作业机器人,具有机械臂臂展长、工具头抓取范围大、控制简单、生产成本低等特点,对带电作业机器人的推广应用有着重要意义。
2 总体结构
单臂带电作业机器人主要用于穿刺型引流器的搭接,具备良好的绝缘性能,主要由工具头、机械臂、平移装置、剪线装置、动力及控制系统、传感系统、机架等组成,其结构如图1 所示,具有抓引流线、送引流线、剪引流线、紧固引流器等功能。

图1 单臂带电作业机器人结构
2.1 穿刺型引流器
穿刺型引流器的结构如图2 所示,包括支撑架、穿刺头、夹头、穿刺头螺杆、夹头螺杆、穿刺头力矩螺母、夹头力矩螺母组成。支撑架上设有供引流器搭接作业时固定在工具头上的安装孔、供穿刺头螺杆、夹头螺杆拧入的螺纹孔,支撑架的一侧设有容纳主线的穿刺卡口、供穿刺头滑动的滑槽和供穿刺主线用的穿刺齿,另一侧设有容纳引流线的夹紧卡口、供夹头滑动的滑槽和固定引流线用的弧形卡槽。穿刺头、夹头分别安装在支撑架的两侧的滑槽内,可在滑槽内滑动,穿刺头螺杆、夹头螺杆穿过支撑架的螺纹孔分别与穿刺头、夹头相连接,穿刺头螺杆、夹头螺杆的另一端分别拧入穿刺头力矩螺母和夹头力矩螺母。当穿刺头力矩螺母和夹头力矩螺母受力旋转时,穿刺头力矩螺母和夹头力矩螺母分别带动穿刺头螺杆、夹头螺杆旋转,使穿刺头、夹头沿滑槽向穿刺齿、弧形卡槽移动,使穿刺头刺入主线并且夹头夹紧引流线,使引流线和主线相连通,实现引流线的搭接。穿刺头力矩螺母和夹头力矩螺母均为铝合金材质,用于控制螺杆对主线及引流线的拧紧力,其设计拧断力矩分别为15Nm 和7Nm。
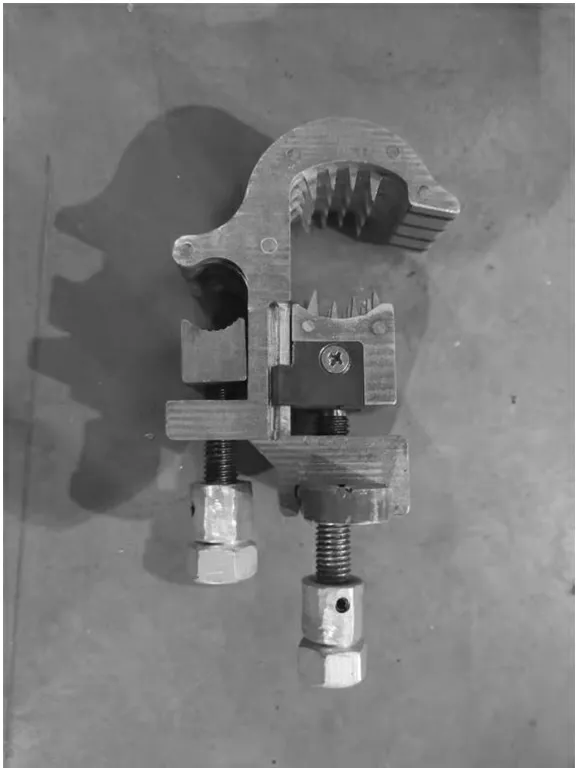
图2 穿刺型引流器结构
2.2 工具头
工具头主要实现3 个功能:①在搭接前引流器的安装在工具头上。②抓取引流线。③搭接后把主线和引流线与引流器相固定,从而对应设计三个功能装置,即卡紧装置、抓手装置和拧紧装置,卡紧装置的作用是在进行搭接前安装和卡紧引流器,使其固定在工具头上,抓手装置的作用是抓取引流线和在搭接过程中使引流线随着工具头一起移动,拧紧装置的作用是驱动引流器上的穿刺头螺杆和夹头螺杆旋转使穿刺头穿入主线以及使夹头夹住引流线,使引流线和主线牢靠的固定在引流器上的夹紧卡口和穿刺卡口内。
工具头主要包括抓手装置、卡紧装置、拧紧装置、连接架体4个部分。
2.2.1 抓手装置设计
抓手装置的设计原则为尽可能方便抓取引流线,扩大抓取范围,降低对机械臂的移动精度和控制要求。同时,在搭接移动引流线的过程中应尽量避免扭曲、弯曲引流线导致的损伤,尽量使引流线处于悬吊状态,因而在到达主线搭接位置前不能将引流线固定在工具头上,而是要在一定范围内可以自由移动但又不能从工具头脱落。
基于以上设计原则,抓手装置设计成主抓手和辅助抓手相配合的方式。辅助抓手的作用为在距引流线一个较大范围内抓取引流线,将引流线限制在工具头所构建的沿引流线断面的封闭空间内。引流线能够在封闭空间内沿引流线的长度方向自由移动,但是断面方向上引流线始终在封闭空间内,从而使引流线在搭接过程中不会从工具头上脱落,随着工具头移动的同时但是又有一定的自由度,使引流线处于悬吊状态,避免扭曲、弯曲所带来的对引流线的伤害。主抓手的作用是机器人将引流线送到主线搭接位置后,将在封闭空间内的引流线精准地送入引流器的夹紧卡口内,并夹住引流线,此时引流线固定在引流器的夹紧卡口内。
抓手装置包括主抓手、辅助抓手、主抓手动作气缸、辅助抓手动作气缸、辅助抓手连杆,主抓手由两侧的抓手和铰耳连接座连接而成,抓手中部设有在支点位置的转轴安装孔,主抓手动作气缸的前端铰座与主抓手的铰耳连接座相铰接,可以推动主抓手绕着支点进行转动。辅助抓手、辅助抓手连杆、连接架体形成一个四杆机构,辅助抓手动作气缸可以推动辅助抓手绕着支点进行转动。
2.2.2 卡紧装置设计
卡紧装置的设计原则为在搭接过程中可靠地卡紧引流器,在搭接完成后能顺利的松开引流器,使引流器轻松脱离工具头。
卡紧装置包括卡紧气缸和卡紧块,卡紧气缸可以推动卡紧块动作使引流器卡紧在工具头上。
2.2.3 拧紧装置设计
为了施工方便快捷,缩短带电作业时间,带电作业机器人一次作业进行一相线的两个引流器的同时搭接,即在工具头一次安装两个引流器,将引流线同时并入两个引流器上,而每个引流线上有两个螺杆,分别用来固定引流线和主线,所以拧紧装置需要拧紧四个螺杆,为了降低工具头的重量,设计成一个电机驱动四个拧紧套筒同步旋转,从而带动螺杆同步旋转的方式,当电机驱动拧紧套筒旋转时,螺杆向内移动夹紧引流线和穿刺主线。
拧紧装置包括拧紧电机、传动轴、齿轮传动装置、拧紧套筒。拧紧电机的动力经传动轴、主动齿轮、从动齿轮传递至拧紧套筒,引流器的力矩螺母套在拧紧套筒内,拧紧套筒旋转将引流器上的力矩螺母拧断,拧紧电机采用大传动比直流电机,其最大转矩可达80Nm。
2.2.4 连接架体
包括前端的支撑架、中部的齿轮箱、后端的连接筒,支撑架上设有安装卡紧气缸的安装座、安装引流器的引流器安装座以及安装主抓手、辅助抓手的支座。为了减轻重量,其材料均为铝合金,齿轮箱采用铝合金材料加工而成,用于安装齿轮传动装置中的各级齿轮。连接筒连接齿轮箱和机械臂,将工具头的重量及所受的负载传递至机械臂上。
2.3 机械臂
引流线未搭接前,引流线的一端固定在输电塔的接线柱上,另一端自由垂落。由于是人工将引流线的一端固定在接线柱上,引流线的姿态和位置是在一个范围内是随机出现。为了方便工具头能够轻松地到达抓取引流线的位置,工具头需要较高的自由度以调整最佳姿态达到在较大范围内抓取引流线的效果。因此,我们的机械臂选择采用六轴协作机器臂,具有六个自由度,既可以姿态控制,又可以单独控制每个轴,可以很灵活地对工具头的位置及姿态进行操作。机械臂最大负载为16kg,最大臂展为1m,自重为38kg。
2.4 平移装置
带电作业机器人安装在高空作业平台上,带电作业机器人的重量要在高空作业平台能承受的范围之内。要想尽量地降低带电作业机器人的重量,就需要降低机械臂自身的重量,同时机器臂要承受工具头的重量以及在搭接过程中引流线对工具头的摩擦力和拉扯力,机器臂只能牺牲臂展来满足承载和重量限制要求。因此为了扩大工具头的运动范围,在机器臂的底座上增加一个平移装置,使机器臂整体移动,扩大工具头对引流线的抓取范围和对主线的搭接范围。
平移装置安装在机架上,由丝杠模组和机械臂安装座组成,机械臂安装在机械臂安装座上,可以在丝杠模组的驱动下进行整体平移,扩大了机械臂及工具头的活动范围,降低了搭接过程的操作难度。
2.5 剪线装置
剪线装置安装在机架的一侧,包括电动线缆剪、位姿调节装置,电动线缆剪包括静刀片、动刀片、电机、小齿轮。静刀片、动刀片采用合金钢刀片,静刀片、动刀片的内侧为刀口,剪切锋利,动刀片外侧有齿,和小齿轮相啮合,电机驱动小齿轮转动,带动动刀片绕静刀片旋转,借助两个齿轮的啮合传动,以带动动刀片的刀口向静刀片的刀口推进,使动刀片与静刀片的刀口所形成的圆形部渐次缩小,以达到剪切的目的,从而切断刀口中的线缆。位姿调节装置包括移动装置和角度调节装置,移动装置用来调节电动线缆剪的位置,角度调节装置用来调节电动线缆剪的倾斜角度,使引流线的末端更方便地进入由静刀片和动刀片封闭的刀口中。
2.6 动力及控制系统
动力系统包括电源、空压机,电源采用48V 的锂电池供电,电量可维持满负载下带电作业机器人工作2~3h,空压机由电源供电,提供各气缸动作所需要的压缩空气。
控制系统包括工控机、机械臂控制系统、PLC 控制系统和信号传输系统。
2.7 传感系统
传感系统包括距离检测模块、视觉模块、电量检测模块、温度检测模块,距离检测模块采用超声距离传感器,安装在工具头前端,用于检测带电作业机器人工具头离异电位的距离。当此距离小于警告距离时,控制系统发出警告,避免带电作业机器人离异电位过近导致放电,从而产生危险。视觉模块主要包括4 个摄像头和照明灯,其中有2 个摄像头布置在工具头前端,用于观察引流线入引流器的情况以及引流器穿刺主线的情况。另外2 个摄像头安装在机架上,一个用于观察引流线、主线的位置和机架臂的状态,一个用于观察剪线装置的位姿以及引流线末端入剪线装置刀口的情况。照明灯用于光线不佳时对环境光线的加强,电量检测模块用于检测电池的电量,当电量低于设定值时进行报警,避免由于电量不足没有完成搭接任务而不能收回带电作业机器人的情况。温度检测模块用于检测绝缘斗内的温度,当温度过高时进行报警,并自动开启散热风扇。
2.8 机架
机架采用铝型材拼接而成,主要起支撑和固定其他部件的作用。
3 高压绝缘设计
单臂带电作业机器人能进行引流线搭接带电作业的关键在于具备良好的高压绝缘性能,单臂带电作业机器人采用四级绝缘设计,第一级为工具头的绝缘,第二级为机械臂的绝缘,第三级为带电作业机器人与高空作业车的绝缘,第四级为无线遥控技术实现控制上的绝缘。
(1)工具头的绝缘包括工具头与机械臂的绝缘、拧紧电机与工具头的绝缘、动力系统与工具头的绝缘。
工具头上连接架体中的连接筒与机械臂的末端相连接,其材质采用玻璃纤维,玻璃纤维是一种机械强度高的绝缘材料,强度高、绝缘性能好,可有效实现工具头与机械臂之间的绝缘。
拧紧电机与工具头的绝缘采取的方案是传动路线中传动轴的材质采用玻璃纤维,既能满足传递动力所需的强度,又能有效的使电机与工具头接触带电线路的部分相绝缘,避免高压电击坏拧紧电机。
工具头上其他的动作元件所需的动力系统采用气动系统,例如主抓手气缸、辅助抓手气缸、卡紧气缸。由于空气的导电性差,因此选用空气作为动力传递介质可实现在动力传递路径上的有效绝缘。
(2)机械臂的绝缘包括机械臂表面涂有绝缘漆并覆有绝缘膜,绝缘膜采用疏水材料制作,可有效避免水积留在机械臂上导致的导电。
(3)带电作业机器人与高空作业车的绝缘是在两者之间采用绝缘斗绝缘,带电作业机器人的控制系统、动力系统、信号传输系统放置在绝缘斗中,并进行有效的防水。
(4)控制上采用无线遥控技术,可以避免控制线路上的物理连接,达到绝缘的效果。
综合上述四级绝缘设计,单臂带电作业机器人具备良好的高压绝缘性能,确保带电作业时的安全。
4 搭接流程
单臂带电作业机器人进行引流线搭接作业包括以下步骤。
(1)设备启动,操作人员安装引流器到工具头上,卡紧气缸驱动卡紧块卡紧引流器,操作人员控制高空作业车将单臂带电作业机器人举升到待搭接的引流线附近的适当位置。
(2)启动带电作业机器人控制程序,机械臂自动运行到预设的抓取位置和抓取姿态,此时工具头的抓手装置运动到待搭接的引流线的附近。
(3)手动远程操作机械臂,精确调整机械臂的位姿,使引流线进入辅助抓手可抓取的范围。
(4)远程操作辅助抓手动作,使引流线进入辅助抓手、引流器、支座所围成的封闭空间内,引流线只能在此空间内沿引流线的长度方向滑动。
(5)机械臂自动运动到设定好的剪线位置,此过程中引流线在封闭空间滑动,此时引流线的末端位于电动线缆剪的附近,调节电动线缆剪的位置和姿态到合适位姿,手动远程操作机械臂使引流线的末端进入电动线缆剪中的剪刀口内,到达合适长度后,运行电动线缆剪,使引流线过长的部分剪断。
(6)机械臂自动运动到设定好的搭线位置,此时引流器位于待搭接的主线位置,控制平移装置使引流线沿主线方向在封闭空间滑动,调整引流线剥线部分离抓手侧边的距离,也就是使引流线剥线部分离引流器的距离在规定的范围内,控制主抓手动作使引流线卡入引流器的弧形卡槽内并由主抓手卡紧。
(7)手动远程操作机械臂的各运动关节,精确调整机械臂的位姿,使引流器的穿刺卡口卡入主线上,控制拧紧电机动作带动拧紧套筒旋转拧紧引流器的力矩螺母,实现穿刺主线,使引流线和主线相连通。当拧紧力矩达到力矩螺母所能承受的最大力矩时,力矩螺母破坏,从而达到了定力矩拧紧的要求。
(8)所有的力矩螺母拧断后,卡紧气缸驱动卡紧块松开引流器,松开主抓手和辅助抓手,操作机械臂带动工具头往下移,引流器从工具头上脱开,从而引流器搭接工作完成。机械臂根据设定程序及关键点的位姿自动运动到设定好的起点位置,进行下一相引流线的搭接。
5 结语
本文设计的单臂带电作业机器人,可以替代人工搭接引流线的作业,避免人工搭接引流线发生触电事故的风险,工具头抓取范围大,可有效降低机械臂的精度要求,采用单臂大负载和大臂展的机械臂,降低了控制难度和产品成本,对我国带电作业机器人的推广应用有着重要意义。
猜你喜欢
中国设备工程(2024年6期)2024-04-08 07:07:08
一重技术(2021年5期)2022-01-18 05:41:56
装备制造技术(2020年9期)2021-01-26 00:15:24
有色金属加工(2020年4期)2020-08-20 04:35:04
经济技术协作信息(2018年33期)2018-12-06 08:56:08
福建质量管理(2018年20期)2018-11-14 04:42:46
电子测试(2018年18期)2018-11-14 02:31:08
制造技术与机床(2017年2期)2017-05-04 04:17:35
电子测试(2017年23期)2017-04-04 05:07:50
现代工业经济和信息化(2016年4期)2016-05-17 05:35:38
