
磁流变液可控多流道悬置隔振性能仿真分析
2022-01-18 11:21林智宏吴明忠
华侨大学学报(自然科学版) 2022年1期
林智宏, 吴明忠
(华侨大学 机电及自动化学院, 福建 厦门 361021)
悬置是动力总成与车身之间连接的隔振元件,它可以支撑发动机静承载力,隔离发动机振动传递给车身,减小路面冲击对发动机的影响,限制发动机的运动空间.理想的动力总成元件应具有低频呈现出大刚度、大阻尼,高频呈现出低刚度、低阻尼的特性,以实现不同工况下车辆的隔振性能[1].目前,已有一些学者对多流道液压悬置或衬套进行研究.Zhang等[2]研究惯性通道的数量、尺寸及长度对液压悬置低频动态性能的影响,发现不同数量的惯性通道可改变液压悬置的刚度、滞后角与激励频率的关系.Barszcz等[3]从实验和理论分析的角度研究惯性通道数量大于2的情况对悬置动力学的影响.杨超峰等[4]建立多惯性通道-多节流孔式液压衬套的集总参数模型,推导刚度和滞后角的计算公式,分析多惯性通道液压衬套的动态特性与惯性通道数量的关系.传统的液压悬置只在特定的频率范围内具有较好的隔振性能,无法满足发动机悬置宽频隔振要求.针对该问题,Wang等[5]设计一种新型的液压悬置,依靠电动马达调节液压悬置惯性通道的长度和横截面积,使液压悬置在低频时获得高刚度,高频时获得低刚度,力的传递率达到最小.Tikani等[6]对放置在惯性轨道上的圆柱形橡胶圆盘施加一个可控制的力,以改变惯性轨道的轮廓,其中,执行器通过施加给定电流,柱塞将通过电磁力移动挤压惯性通道,从而实现悬置通道横截面积可调.Truong等[7]提出一种新型半主动液压悬置,通过电动马达调节惯性通道的横截面积,实现悬置动刚度和滞后角可调,有效地提高了发动机的隔振性能.Foumani等[8]为了解决低频道路激励和高频发动机激励,设计一种能够同时控制惯性通道长度和解耦盘有效面积的执行器.Fan等[9]提出一种4腔3流道的半主动下摆,可获得发动机最佳隔振性能.然而,现有的半主动悬置结构复杂、安装紧凑,不能很好地解决发动机的宽频问题.
磁流变液悬置可以实现阻尼实时可调,很小的电流(一般小于3 A)即可得到很大的阻尼,具有可控性强、响应速度快、功耗低等优点.Ahmadian等[10]首次提出磁流变液悬置流道关闭和开启时力的传递率和动刚度变化特性,并找出最佳频率点作为切换流道的关键点,实现特有频率下发动机悬置隔振,但该结构只有单流道,无法实现宽频隔振.Tamer等[11]设计3种结构的磁流变液悬置(磁阻8孔(MR8孔)、磁阻16孔(MR16孔)和磁阻槽(MR槽)),相较于传统液压悬置和被动橡胶悬置,磁流变液悬置具有更小的力的传递率,MR8孔具有最大的动刚度和最小的力的传递率.Wang等[12]设计流动和挤压混合模式的磁流变液悬置,可在特定的频率范围内实现阻尼连续可调,隔振性能优于单惯性通道流动工作模式的磁流变液悬置.Ung等[13]针对发动机启停振动问题,采用流动工作模式,设置的径向流道角度为3.5°,可实现悬置满足较大的阻尼,减少发动机启动/停止模式下机体的振动.John等[14]提出一种以磁流变液为可控液体剪切工作模式的磁流变液悬置,相较于被动橡胶悬置,该磁流变液悬置可获得较好的隔振性能.Yang等[15]采用流动共作模式,设计一种由径向和环形组成的流道,可降低重型车辆客舱不必要的振动.Deng等[16]提出一种流动型的磁流变悬置,可控制车辆处于启动/停止模式.
目前,关于磁流变液悬置的研究主要集中于结构优化、动态特性或磁流变液迟滞等方面.基于此,本文提出一种磁流变液可控多流道悬置,对不同的流道施加磁场作用,以控制流道的开闭,从而实现动刚度和阻尼可调.
1 多惯性通道液压悬置模型及仿真分析
多惯性通道液压悬置,如图1所示.图1中:C1,C2分别为悬置的上、下液室柔度;p1,p2分别为上、下腔的压强;Sp为悬置上腔有效横截面积;Kr,Br分别为主簧橡胶的刚度和阻尼;Qi为惯性通道的流量;Xe为发动机位移.

(a) 悬置结构图 (b) 集总参数模型图1 多惯性通道液压悬置Fig.1 Multi-inertial channels hydraulic mount
悬置的上腔与主簧橡胶固联,下腔与金属板相连,主簧橡胶作为悬置的主要结构,对发动机起静态承载作用.
根据流体力学公式,可得多惯性通道液压悬置的动态方程为
(1)
(2)
(3)
(4)
式(1)~(4)中:Ii,n为第n个惯性通道的惯量系数;Ri,n为第n个惯性通道的阻尼系数;m为发动机质量;Fexc为发动机激励力.
由式(1)~(4)可得矩阵A~D,即
(5)
(6)
(7)
D=[Br].
(8)
由此可得传递函数G(s)为
(9)
式(9)中:FT为发动机传递给车身的传递力;s为复数;I为单位矩阵.
当4个惯性通道处于打开状态时,悬置的传递复刚度Kdyn为
Kdyn(s)=sG(s)=sC(sI-A)-1B+sD.
(10)
当4个惯性通道的几何形状相同时,悬置的传递复刚度Kdyn则为
(11)
当4个惯性通道处于关闭状态时,悬置的传递复刚度Kc为
(12)
在外界激励下,悬置力的传递率RT为
(13)
式(13)中:K′,K″分别为悬置传递复刚度的实部及虚部.
悬置模型参数,如表1所示.表1中:Li为惯性通道长度;η为磁流变液粘度;Si为惯性通道横截面积;ρ为磁流变液密度.

表1 悬置模型参数Tab.1 Mount model parameters

图2 多惯性通道液压悬置动刚度的变化曲线Fig.2 Variation curves of dynamic stiffness of multi-inertial channels hydraulic mount
结合表1和式(11)~(13),可得多惯性通道液压悬置动刚度的变化曲线,如图2所示.图2中:Kd为动刚度;f为激励频率.由图2可知:随着惯性通道数量的增加,多惯性通道液压悬置动刚度的下凸频率由11.2 Hz(n=1)增大至23.4 Hz(n=4),可减少发动机怠速引起的激励振动;随着惯性通道数量的增加,多惯性通道液压悬置的最大动刚度(液压悬置的共振频率点)也随之增加;当n=0时,多惯性通道液压悬置的动刚度由250 N·mm-1上升至610 N·mm-1,可降低路面激励导致的大振幅运动.
多惯性通道液压悬置滞后角的变化曲线,如图3所示.图3中:φL为悬置的滞后角.由图3可知:随着惯性通道数量的增加,滞后角的幅值和峰值频率也随之增大.
多惯性通道液压悬置力的传递率的变化曲线,如图4所示.由图4可知:不同的惯性通道数量可实现不同频率范围内最小的力的传递率.
由此可得以下2个结论.1) 改变惯性通道的数量,可拓宽多惯性通道液压悬置动态特性的频率范围,获得悬置的最佳隔振性能.2) 在低频区域(n=0),悬置表现为大刚度和大阻尼;当4个惯性通道处于关闭状态时,悬置可抑制发动机因低档位全油门和路面不平衡激励导致的大振幅振动.

图3 多惯性通道液压悬置滞后角的变化曲线 图4 多惯性通道液压悬置力的传递率的变化曲线 Fig.3 Variation curves of lag angle of multi-inertial Fig.4 Variation curves of force transmission rate of channels hydraulic mount multi-inertial channels hydraulic mount
2 磁流变液可控多流道悬置
2.1 可控多流道开闭实验
为了验证施加较大电流时,以磁流变液为介质的多流道(惯性通道)可以控制流道的开闭,设计了磁流变液可控多流道阻尼器,其实验装置,如图5所示.该实验采用3个流道,流道两端安装压力传感器1和压力传感器2,以便求得流道两端的压力差Δp(压力传感器1和压力传感器2的差值).

图5 可控多流道磁流变液阻尼器实验装置Fig.5 Experimental device of controllable multi-fluid channels magnetorheological fluid damper
分别在激励幅值A=15.92 mm,f=1 Hz,以及A=7.96 mm,f=2 Hz的情况下,进行对比实验.1) 实验1.分别测试1个流道堵塞(1流道堵塞)、1个流道施加2 A电流(1流道磁流变液作用)的压力差.2) 实验2.分别测试2个流道堵塞(2流道堵塞)、2个流道施加2 A电流(2流道磁流变液作用)的压力差.实验1,2的压力差曲线对比图,如图6,7所示.由图6,7可知:实验结果的曲线几乎重叠,验证了可控多流道可以控制流道的开闭.

(a) A=15.92 mm, f=1 Hz (b) A=7.96 mm, f=2 Hz图6 实验1的压力差曲线对比图Fig.6 Pressure difference curves comparison diagram of experiment 1
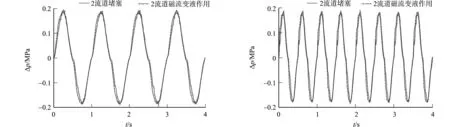
(a) A=15.92 mm, f=1 Hz (b) A=7.96 mm, f=2 Hz图7 实验2的压力差曲线对比图Fig.7 Pressure difference curves comparison diagram of experiment 2
2.2 磁流变液可控多流道悬置模型及仿真分析
磁流变液可控多流道悬置,如图8所示.图8中:ΔpMR为由剪切应力引起的压降.

(a) 悬置结构图 (b) 集总参数模型 图8 磁流变液可控多流道悬置Fig.8 Controlled multi-fluid channels mount of magnetorheological fluid
由于液压悬置可通过惯性通道数量的变化拓宽悬置的动刚度和阻尼的频率范围,因此,在多惯性通道液压悬置的基础上,以磁流变液(MRF)为可控液体,控制不同流道的开闭,从而实现悬置的动刚度和阻尼可调.相较于多惯性通道液压悬置,磁流变液可控多流道悬置的动态方程除了上、下压力差多了磁场可控项外,其余部分均相同,故不再详细推导.
磁流变液可控多流道悬置的动态方程为
(14)
(15)
式(14),(15)中:ΔpMR,n为第n个流道由剪切应力引起的压降;C取决于稳态流动条件,可取2~3范围内的常数,文中取C=2;h为流道宽度;τy为剪切应力;vi,n为流道流速.

图9 磁流变液磁场强度与剪切应力的关系曲线Fig.9 Relationship curves between magnetic field strength and shear stress of magnetorheological fluid
选用美国LORD公司的MRF-126CD型磁流变液[17],磁流变液磁场强度与剪切应力的关系曲线,如图9所示.图9中:H为磁场强度.
由图9可知:磁流变液的剪切应力随着磁场强度的增加而逐渐增大,当磁场强度增加到300 kA·m-1时,剪切应力达到饱和,不再增大.
由式(12)~(15)可得磁流变液可控多流道悬置力的传递率与动刚度,如图10,11所示.图10中:划分不同频段与不同力的传递率曲线,以不同激励频率下力的传递率最小为原则,划分了5个可控区域(区域1~5).
由图10可知:在30 Hz的频率范围内,可根据不同的激励频率开闭不同数量的流道,以实现力的传递率最小.

图10 磁流变液可控多流道悬置力的传递率曲线 图11 磁流变液可控多流道悬置的动刚度曲线 Fig.10 Force transmissibility rate curves of controllable Fig.11 Dynamic stiffness curves of controllable multi-fluid channels mount of magnetorheological fluid multi-fluid channels mount of magnetorheological fluid
当4个流道不加磁场作用时,磁流变液可控多流道悬置的流道总横截面积Sio=4Si;当1个流道施加磁场作用时,Sio=3Si;当2个流道施加磁场作用时,Sio=2Si;当3个流道施加磁场作用时,Sio=Si;当4个流道施加磁场作用时,Sio=0.因此,可对不同的可控流道施加较大的磁场,增加磁流变液的剪切应力,使流道的液体不流动,从而实现流道的开闭,并间接地实现悬置的流道总横截面积可调.
磁流变液可控多流道悬置以振动衰减最大化和价格最廉价为目标,暂时不考虑复杂控制器.根据图10划分的区域,可得不同激励频率下最佳可控流道总横截面积为
(16)
由式(16)可知:当0 Hz (a) 发动机激励力 (b) 传递力 (c) 发动机位移图12 磁流变液可控多流道悬置的隔振性能Fig.12 Vibration isolation performance of controllable multi-fluid channels mount of magnetorheological fluid 为了验证磁流变液可控多流道悬置的隔振性能,对单自由度悬置系统施加发动机激励力Fexc=1 000 sin(2πft),当f=20 Hz,验证区域4的1个流道施加磁场作用时悬置隔振能否获得最佳性能. 对区域4的1个流道施加磁场作用,磁流变液可控多流道悬置的隔振性能,如图12所示.由图12可知:区域4的1个流道施加磁场作用时,悬置可获得最佳隔振性能;传递力和发动机位移都达到最小. 1) 惯性通道数量的改变可拓宽悬置动态特性的频率范围,使悬置可以在更宽的频率范围内得到更小的动刚度;当4个惯性通道处于关闭状态时,悬置表现出较大的动刚度和阻尼. 2) 对磁流变液可控多流道悬置的不同流道施加100 kA·m-1的磁场强度,可控制流道的开闭,从而使悬置力的传递率最小,并实现动刚度可调. 3) 已知激励频率,根据可控区域实时控制流道数量,可获得最佳隔振性能.

2.3 数值仿真分析
3 结论
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
航空发动机(2022年4期)2022-10-13
汽车实用技术(2022年14期)2022-07-30
中国应急管理科学(2022年2期)2022-05-23
化学教学(2022年4期)2022-05-07
振动工程学报(2019年2期)2019-05-13
现代商贸工业(2016年4期)2016-10-14
建筑工程技术与设计(2015年29期)2015-10-21
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
