
基于Gazebo的智能汽车仿真测试
2022-01-17 06:28:34方琳刘畅张莹
电子元器件与信息技术 2021年10期
方琳,刘畅,张莹
(中汽数据(天津)有限公司,天津 300380)
0 引言
当前智能汽车得到了大力的发展,很多大企业着重在该项领域的研究,比如特斯拉、谷歌,而其他传统汽车制造商也同时在研究自动驾驶系统。自动驾驶汽车是通过计算机操作的汽车[1]。结合各项高科技技术,汽车能够在没有人的情况下完成自己驾驶,汽车行业的发展自然也带动了人们对于汽车服务的需要。因此,作为汽车主要发展趋势的独创性吸引了制造商的更多关注。在不久未来,汽车将实现无人驾驶。但伴随着汽车驾驶率的不断提高,如何正确评估和验证自动驾驶汽车系统的性能和智能自动驾驶算法已成为重要的环节。
1 智能汽车仿真
仿真是自动驾驶领域的一项相当重要的新技术,近年来,越来越多的自动驾驶技术得以运用,仿真作为自动驾驶中的一个重要领域和重要环节,也扮演着日益重要的角色;仿真虚拟测试的根本是保证车辆安全上路,首先,最需要保障的是车辆安全,在Gazebo构建的环境地图中可以很大程度上地还原真实路况,也大大节省了实验的开支;发展自主仿真软件可作为行业研发的备用系统,当不具备实验所需的条件时,仿真测试的存在就显得尤为重要;仿真测试是自动驾驶技术发展的必然结果,目前在汽车行业中普遍存在的情况是,先进行仿真测试,再进行具体试验[2]。
2 仿真设计方法
2.1 仿真方法
本设计的研究方法将基于Ubuntu16.04系统的ROS操作系统的基础上来展开,充分利用仿真软件Gazebo来进行虚拟车辆的仿真以及部分自动驾驶功能的实现。期间Rviz也扮演着重要的角色,例如,在Velodyne传感器的仿真环节中,Rviz将会在三维空间内模拟真实的Velodyne激光雷达产生的波以及当它的波在遇到障碍物时所发生的方向的改变。这些功能都是Gazebo所不具备的,对于此次设计来说,Rviz也是不可或缺的一个重要部分。本设计的主要仿真环节将在Gazebo中进行,通过在Ubuntu系统的终端中输入的相应代码来一一调用对应的传感器,并通过指令来实现在Gazebo中的仿真。还可以通过构建环境地图来实现虚拟驾驶的路况模拟,这将作为仿真车辆的驾驶环境。为了实现更好的传感器模拟,往往需要在仿真传感器的周围放置一定的障碍物,这能够在Rivz中更好地体现传感器的作用[3]。
同时,应该充分利用DBW车与ROS的连接,因为只有通过DBW通信,才能实现本设计的最终目的,一辆具有初步自动驾驶功能的仿真汽车,通过相应的指令实现与车辆的通信后,便可使用操纵杆来测试汽车。
2.2 准备工作
本设计所需的Ubuntu系统既可以在Windows的基础上安装虚拟机,也可以安装双系统,但由于本设计的仿真工作将消耗大量内存,故性能普通的电脑上安装虚拟机的方法并不适合本设计,因其只能分配2核至虚拟机,运行Gazebo软件过于吃力;而双系统的好处在于可以将所有的内核都用于该系统,有利于仿真软件的流畅运行。
先下载安装制作工具UltraISO并完成安装;接着准备一个空白的(USB3.0接口,16GB及以上)U盘;打开安装好的UltralSO,当弹出对话框时,点继续试用;选择打开页面;在弹出的文件选择对话框中找到已经下载的Ubuntu16.04 LTS镜像文件;再通过点击启动按钮,选择写入硬盘映像;对刚才的U盘写入方式进行设置为USBHDD+,再格式化,再点击写入,耐心等待写入过程结束后,点击返回,至此,启动盘已经制作完毕。
再给予Ubuntu一定的空间,再点击存储/磁盘管理;在磁盘区的留出一定的空间,大约256GB的空间用于安装Ubuntu。
2.3 安装Ubuntu16.04
关闭目标主机,插入启动盘,再开机,按住F12按钮进入bios界面,选择Boot Menu选项,进入界面后选择Install Ubuntu,开始安装。
待安装完成,根据一系列指示选择自己所需的选项,当进入选择安装类型的界面时,选择其他选项,进行手动分区(由于选择Windows与Ubuntu共存容易造成前者启动程序的丢失),分区过程不再赘述[4]。
3 仿真设计
3.1 整车参数
整车基本参数和目标性能参数如表1所示。

表1 性能参数
3.2 驱动电机的参数匹配与选型
因永磁同步电机具有功率高、结构简单等优点,所以本设计选择汽车永磁同步电机。从最高车速和最大爬坡度计算所需的电机峰值功率,由常规车速、额定转速与峰值转速的关系分别得出汽车电机的额定转速和最大转速分别为3061r/min和9183r/min,并且根据电机自身的额定转矩和额定转速计算出40kw的额定功率,汽车50kw的最大功率是从最大爬坡计算出来的。
3.3 动力电池选型与参数匹配
本文选择磷酸锂铁电池用作动力电池,从额定电压可看出为256V,一个磷酸铁锂电池的容量为3.2V,因此该系列需要80个电池串联。电池电量可计算如下,其中P为功率,n为电池数量,v为电压,m*g为满载质量,f为滚动阻尼系数,c为风阻系数,A为迎风面积,V2为平均车速,s为行驶距离,Cd代表风阻系数,t为时间:
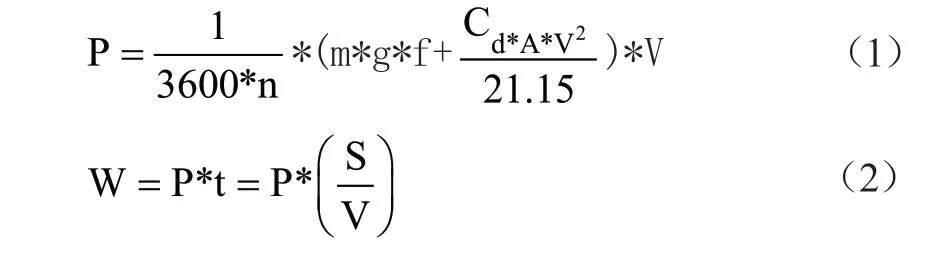
计算得W=39.85KW·h。全部串联电池内量为256V×20Ah=5120W(20Ah为电池的额定电流),因此需要8个电池组并联。总能量取40kw·h。
3.4 仿真验证
本文利用Gazebo来开发完整的电动汽车模型,其中包括动力电池、汽车驱动器、制动器等模块。通过本文对车辆类型和驾驶操作的设计,明确设计项目,车辆模型以及与车辆模型相对应的零件模型。根据纯电动物流车的标准布局和设计,选择兼容的部件模块,并设置每个模拟计算模块的主要参数。依据构造方案,使用Gazebo和ROS功能对电气和机械进行连接。完全掌握各部件的传递关系,并根据这之间的关系,建立整车的各个部件信号联系,最终设计出整车模型。
在开发了车辆模型之后,本文标准工况下选择NEDC循环工况以模拟和分析所构建的模型。在Gazebo工作位置页面上,在0.01秒内设置模拟步骤,然后选择标准驱动程序模型和标准交通模型。在完成设置任务后,根据NEDC的工作条件进行了模拟测试。
车速可以很好的随着工况运行。车辆在可以通过制动能量充电,SOC的变化较为平稳,电池运行状态良好[5]。
4 结语
本设计对自动驾驶汽车及其实现的仿真过程进行了简单的研究。首先,通过查找资料,了解了自动驾驶汽车的技术及其历史,亦知晓了一辆自动驾驶汽车的核心部分。然后,通过查找自动驾驶汽车常用的不同传感器和部件,确定了本设计所需要组装的自动驾驶汽车的方案。最后,着手安装相关软件,并开始在Gazebo中仿真一辆自动驾驶汽车,将其与ROS这一关键目标连接,实现了在 NEDC工况下的仿真分析,仿真结果显示了本次研究的可靠性,可以为后期的开发提供参考依据。
猜你喜欢
今日农业(2022年14期)2022-09-15 01:43:28
军事文摘(2022年14期)2022-08-26 08:14:30
煤气与热力(2022年4期)2022-05-23 12:44:44
科学大众(2021年21期)2022-01-18 05:53:42
小学科学(学生版)(2021年12期)2021-12-31 03:22:18
舰船科学技术(2021年12期)2021-03-29 01:28:34
铁道通信信号(2020年1期)2020-09-21 08:55:04
学生天地(2020年5期)2020-08-25 09:09:08
电子测试(2018年10期)2018-06-26 05:53:36
汽车博览(2016年9期)2016-10-18 13:05:41
