一种可自动运行于大型场馆中的消杀机器人研究*
2022-01-16 09:55:40韩健睿杨旭东郭瑞莲王学雷商宇凡
科技创新与应用 2022年1期
时 光,韩健睿,杨旭东,郭瑞莲,王学雷,商宇凡
(1.北京工业大学,北京 100124;2.北京电子科技职业学院,北京 100176)
AGV(Automated Guided Vehicle)小车又称自动引导运输车,是一种集机械、电子、控制、计算机、传感器以及人工智能等多学科于一体的现代化自动设备,已广泛运用在自动化生产工厂、有毒有害环境、智能物流基地中,如汽车制造车间物料运送、焊接车间钢板运输、快递分拣等作业。2019 年底,新型冠状病毒肺炎Corona Virus Disease 2019,COVID-19)暴发,经过长时间艰苦抗争,国内疫情现已得到基本控制,在新冠肺炎的抗争过程中,智能机器人在各个行业中得到广泛应用。现距2022 年北京冬奥会越来越近,届时北京将成为全世界的焦点,场馆内疫情防控保障措施更将成为重中之重。本文将AGV 小车、可控制喷淋系统及单片机控制技术相结合,设计了一款可自动运行于大型场馆中的消杀机器人,对公共卫生服务业、医疗业的未来发展,以及提高消杀效率、减少感染风险等有着重要的意义。
1 消杀机器人系统介绍
消杀机器人分为三大部分,分别是小车运行部分、小车避障系统、伸缩喷雾臂。其中,小车运行部分主要包括AGV 小车整体驱动轮结构与其电机控制系统,可对AGV小车运行机构与爬升机构进行控制。小车避障系统主要包括红外光电传感器与触点开关,能够对碰到的物体进行避让,保证AGV 小车顺利运行,伸缩喷雾臂有6 个喷雾嘴,实现对小车运行过程中大范围喷雾作业,如图1 所示。
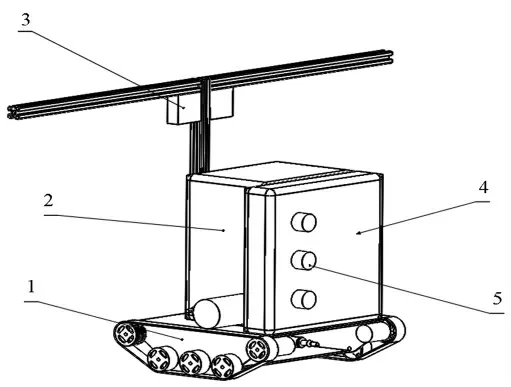
图1 消杀机器人整体结构
2 消杀机器人控制系统设计
智能喷淋系统包括药物供给模块、药物输送模块以及伸展喷雾臂模块。药物供给模块可满足药物储存、药量低位监控以及供给压力检测功能,药物输送模块可将经过加压的药物输送至末端喷雾臂,喷雾臂模块可完成伸缩及展开角度的动作以满足不同场景的特殊需求。消杀机器人系统组成如图2 所示。
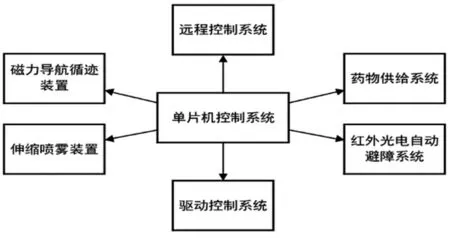
图2 消杀机器人系统组成
2.1 驱动系统控制
系统采用单片机作为控制模块,直流电机作为动力供应单元,电机通过驱动器完成其旋转速度、旋转方向的控制,单片机模拟量输出控制电机速度,单片机开关量输出控制电机旋转方向,电机的转速可通过旋转编码器作为反馈信号,通过单片机读取旋转编码器反馈的转速信号来对比目前所需速度,进而实现自动调节电机旋转速度的目的。磁导传感器安装在消杀机器人底部,在场馆中铺设导向磁条,通过磁导传感器反馈的磁条位置信息,来修正电机的旋转速度及旋转方向等参数,实现自动循迹及导向的功能。磁导式自动循迹具有稳定性高、抗干扰能力强、耐久性良好等优点,搭配自动避障系统可完成更加稳定智能的自动循迹功能,如图3 所示。
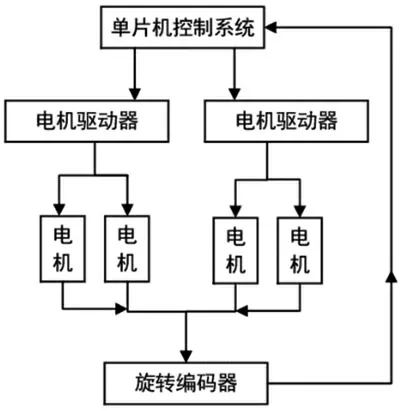
图3 驱动部分控制原理图
2.2 自动避障系统
消杀机器人配备自动避障系统,自动避障系统由多个红外光电传感器及单片机控制系统组成,红外光电传感器可调传感距离,即可实现自动避障系统的工作范围的调节,当在自动避障系统的工作范围内检测到障碍物后,由传感器反馈信号到单片机控制系统,由单片机控制系统做出判断,根据自动循迹算法调整电机旋转速度,或控制电机停止转动以及对是否需要停止喷药进行判断,或单独停止某一个或某几个喷嘴,如图4 所示。
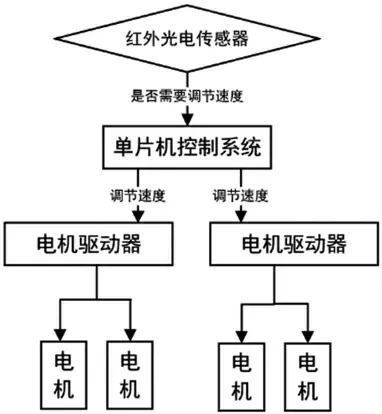
图4 自动避障系统控制原理图
2.3 药物供给模块
药物供给模块包括药量低位监控、水泵控制和压力监测等。药量低位监控采用开关量检测,当药物水位到达最低限度时将停止喷药,并发出报警,避免出现水泵空转而烧毁水泵的风险及漏喷、缺喷的现象。本文采用可调压力大功率节能水泵,在节能环保的前提下大幅度提高供给压力,也可根据使用场景自动调节输出压力。水泵的控制采用开关量输出,控制水泵电源供应。压力检测系统监测管道压力,从而判断是否存在压力不足、管道阻塞的情况。在压力不足的情况下调高供给压力,在压力过高的情况下降低供给压力,过程智能化,不用人工介入,适用更多场景。
消杀机器人水泵控制系统核心为单片机控制系统,控制系统读取低药量传感器所发回的反馈信号从而控制水泵电源电路断电停止水泵运行,停止喷药,并通过集成继电器对人机交互指示灯中的低药量低水位指示灯提供24V 电源,点亮低药量指示灯。水泵的功率控制由压力传感器来实现,单片机控制系统读取压力传感器的模拟量压力信号与系统内设定压力值进行对比,通过算法算得设定压力偏移量,根据偏移量向水泵输出不同的模拟量信号来调节水泵输出功率。药物供给系统控制原理图如图5 所示。
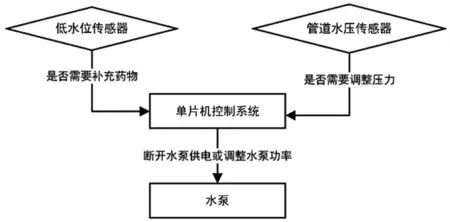
图5 药物供给系统控制原理图
2.4 伸展喷雾臂模块
伸展喷雾臂控制系统主要由单片机来实现,单片机控制单元通过PWM 方式控制末端执行器的伸缩及展开角度,PWM 的控制方式使电动伺服系统更加精确可控,角度及距离控制更加细腻、精准。在伸展喷雾臂型材的固定位置安装行程开关或接近开关,当单片机控制系统接收到接近开关或行程开关的输入信号时,说明伸展喷雾臂已达到最大位置或预定位置,单片机控制系统将对电动伺服系统发送停止信号,停止喷雾臂的伸展,并向水泵控制系统发送启动信号,水泵控制系统根据预设功率系数进行喷雾。
3 车身结构设计
本文所设计的消杀机器人系统包括驱动部分、电机支架、水箱、控制模块、操作模块、伸展喷雾臂部分。
驱动部分采用履带式设计,直流电机作为动力供应单元,电机配备驱动器提供相应功率,完成电机转速、转向控制。控制单元采用模拟量方式给定电机转速,高低电平给定电机转向,电机速度控制通过旋转编码器实现反馈。外侧的直流电机位置可调,提高了适应性。本研究可实现爬楼梯、原地旋转、小角度转弯、大角度转弯等功能。安装在控制箱外的指示灯可实现简单的人机交互,如:剩余药量报警、剩余电量报警、输送压力报警等交互信息。操作模块包括电源总开关、启动按钮、停止按钮、急停按钮等操作按钮,可实现整个系统启动、停止及紧急情况下的紧急处置。
3.1 驱动部分机械结构设计
履带控制比麦克纳姆轮四轮控制简单,其采用的是差速转向机构,其转向时保持直线行驶速度不变的点在车辆的几何中心,在转向时只需要使左右两侧的驱动电机驱动履带的速度不一样即可。对于履带控制来说,其难点在于要使同一侧的电机保持转速一致,而且在消杀机器人直行过程中要保证两侧电机驱动履带的速度一样。可以通过STM32 单片机进行PID 闭环精准控制来解决其难点。消杀机器人驱动结构如图6 所示。

图6 消杀机器人驱动结构
3.2 喷雾部分机械结构设计
喷雾臂采用单侧两根5m 的轻量化高强度铝制型材及高压喷嘴组成,铝制型材重量轻、强度高,可承受高压力喷雾时所带来的后坐力,不会轻易弯折,使本设备更加坚固可靠。喷雾臂的伸展控制采用电动伺服系统实现,喷嘴采用六个高强度合金喷嘴,可承受输送模块输送来的高压药物,实现对小车运行过程中大范围喷雾作业。消杀机器人喷雾机械结构如图7 所示。

图7 消杀机器人喷雾机械结构
4 结论
本文所设计的基于磁导技术的AGV 小车配合履带行走机构,搭载智能喷雾系统,可以在大型场馆楼梯上运行,并且进行喷雾作业,大大提高了场馆中消杀设备的智能化程度与消杀工作效率。传统消杀作业主要是依靠人工完成,不但耗费大量人力,效果也不理想,效率低,而且感染风险极大。消杀机器人可对大型场馆中观众席进行消杀作业,使得场馆消杀作业高效,对于未来2022 年北京冬奥会运动场馆消杀设备选型起到了重要参考价值与技术参考。
猜你喜欢
现代职业安全(2022年4期)2022-06-10 02:49:42
水泵技术(2021年5期)2021-12-31 05:26:46
科教新报(2021年34期)2021-09-30 09:32:52
环球时报(2021-04-22)2021-04-22 04:15:42
昆钢科技(2021年1期)2021-04-13 07:55:04
快乐语文(2020年36期)2021-01-14 01:10:32
科学大众(2020年17期)2020-10-27 02:49:02
无人机(2020年2期)2020-07-20 16:20:28
文苑(2018年22期)2018-11-19 02:54:18
电子制作(2018年8期)2018-06-26 06:43:02