
三七育苗播种机导种管设计与试验
2022-01-14 05:43杨文彩张效伟仲广远郑嘉鑫马永敢
华南农业大学学报 2022年1期
杨文彩,张效伟,仲广远,郑嘉鑫,蒲 望,马永敢
(1 云南农业大学 机电工程学院,云南 昆明 650201; 2 中国农业大学 工学院,北京 100083)
三七Panax notoginseng是我国名贵的中药材,市场需求量大[1-2]。根据农艺要求,三七育苗播种行株距均为 50 mm,播深为 10 mm,属小行株距、浅播深精密播种[3]。目前人工点播为主的模式存在用工成本高、作业效率低、作业质量不均匀等问题,机械化播种能有效提高播种质量进而提高效率、降低成本[4];但三七种子三轴尺寸集中度低、似圆度低、硬度低、表面粗糙度和湿度大、流动性不好,与其他大田大行株距作物种子相比,机械化播种难度大。开沟、排种、覆土各部分系统协调才能实现三七育苗播种机械化。导种管将种子导入种沟,并约束种子流;由于三七种子的特性,导种管对投种过程及种子落点位置影响较大[5-6]。因此结合三七播种的农艺要求和种子特性研究三七种子离开排种器后的投种轨迹,对设计合理的导种管进而提升播种精度和播种效率具有现实意义。
本研究前期采用机械重力式排种原理,设计了窝眼轮式排种结构,经试验,排种器能排出均匀的种子流[7-8];因导种管设计不科学,种子的纵向分布均匀性与生产要求差距大,本文将这种差距界定为播种精确性,此差距越大播种精确性越低。精确性是衡量种粒纵向分布均匀性和播种机性能的重要指标,受排种、投种和种床构建等多个环节影响[9-10]。种粒与管壁的碰撞和触土时的弹跳所引起的不规则运动易造成种粒的纵向分布不均匀[11-13],影响播种精确性,合理的导种管能减少种粒的碰撞和弹跳[14-15]。因此,设计出合理的导种管是提高播种精确性的重要手段[16]。
多年来,国内外学者在导种管方面展开了较多的研究。在低速作业时,改变导种管外形能改变种子的下落轨迹,减轻种子的弹跳,保证种子纵向分布的均匀性[17-19];在高速作业时,可利用二次投种的方法将种子运移到种床,通过带式导种或V型凹槽拨轮能准确地将种子输送到种沟,大幅提高播种的纵向分布的均匀性[20-23]。此类方法设计的结构较为复杂,不适于三七的精密播种。在导种管内分配均匀气流将种子运输的气力集排式分种器,可以实现宽幅均匀播种[24-25],在导种管内增加波纹和保证导种管长度一致可增加种子行内稳定性[26]。在投种过程中,种子在导种管内的弹跳与碰撞情况复杂,很难通过理论计算做全面分析,高速摄像技术广泛应用于投种过程分析,运用高速摄像技术可以获得种子速度随位移变化规律、不同投种参数下的投种轨迹[27-29]。上述研究分别从部件结构和运动规律等方面展开,但这些研究主要针对油菜、大豆、玉米,小麦等大田大行株距作物,研究结果不适用于小行株距、浅播深精密播种的三七,因此,有必要开展有针对性的研究。
本研究拟应用力学分析确定影响播种精确性的因素,通过台架试验研究精密播种的最佳工作参数组合,运用高速摄像与图像处理技术研究种子离开排种器后的运动轨迹,以拟合曲线为基础,设计出一种新的导种管,并通过土槽试验验证此设计的合理性。
1 槽式育苗播种方式及播种机结构
1.1 三七槽式育苗播种方式
云南广泛采用的育苗槽规格为1 440 mm宽,据此设计播种机的播幅为 1 400 mm,根据 50 mm行距的播种农艺要求,播幅内等距排列28个开沟器和28根导种管,机械化播种时,播种机在槽肩上行走,槽内播种,三七育苗槽及播种示意图如图1所示。

图1 三七育苗槽及播种示意图Fig. 1 Structure sketch of Panax notoginseng seedling trough and seeding
1.2 三七育苗播种机整机结构
三七育苗播种机整机结构如图2a所示,包括种箱、排种器、导种装置、开沟装置、限位装置、控制柜、传动装置、机架和升降螺杆行走装置等。排种器由窝眼滚筒、V型导种槽、圆弧形护种板等组成,导种装置安装在排种器下部,由28根导种管和投种器组成。如图2b所示,开沟装置由28只仿形开沟轮组成,安装在播种机前部,开沟轮厚20 mm,每两只开沟轮之间的中心距离为50 mm,每两根导种管之间的中心距离也为50 mm,其中导种管中心线与开沟轮中心线处于一条直线上。

图2 三七育苗播种机结构示意图Fig. 2 Structure sketch of Panax notoginseng seedling planter
1.3 三七育苗播种机工作原理
播种机播种过程中,电机带动主动轮使播种机前进,安装在机架底部的限位轮保证播种机沿直线行走,主动轮轴通过传动系统使窝眼滚筒转动,种子由窝眼滚筒排种器携带,当种子到达投种点时因重力作用离开排种器,经导种管输送到开沟器开出的种沟内。
2 投种过程种子力学分析
种子的运动轨迹与种子下落过程中的受力有关,有导种管和无导种管时受力有所不同[30],无导种管时种子的运动只受重力作用,有导种管时还会受导种管管壁的作用。本研究对2种情况下的种子运动进行力学分析,探究影响种子运动轨迹的因素,并通过对比最终确定影响播种精确性的主要因素。
2.1 有导种管时种子的运动分析
理想情况下种子离开排种器后就与导种管管壁接触并沿管壁下滑,然后离开管壁做类斜抛运动,直至落地。为便于研究三七种子的运动规律,以投种点为坐标原点、以播种机前进速度的反方向为x0轴正方向、以竖直向下为y0轴正方向,建立如图3所示的坐标系O0。
图3 种子与导种管管壁接触过程的受力及运动分析图Fig. 3 Force and motion analysis graph of seeds which contact with seed guide tube wall
种子刚进入导种管时,种子的速度与种子在排种器投种口处的速度(V0)相同,此时V0=2πR1n1。在种子沿导种管下滑的过程中,种子在重力(G)、支持力(N)、摩擦力(f)的作用下做匀加速运动,此时的加速度(a)为

式中,μ1为种子与导种管间的摩擦系数。
对式(1)进行2次积分得:

式中,V为种子运动的瞬时速度,m/s;S1为种子运动的位置到坐标原点的距离,m;t表示种子运动时间,s。
种子沿管壁下滑时,可分解为沿x0轴和沿y0轴2个方向的运动,设种子沿导种管内壁滑动的时间为t1,在0≤t<t1时,种子的运动轨迹为
三七种子沿导种管位移的终点位置满足关系式

此时,种子的行程S1与导种管长度尺寸L相等,有S1=L。
由式(4)和式(5)可知,种子在导种管内的运动与导种管与水平线的夹角、种子离开排种器时的初速度和运动时间有关。
种子离开导种管后以Vt的初速度做类斜抛运动,此时种子运动微分方程为

可以求得

整理式(7)并把式(8)带入其中,求得种子着地时的位置满足关系式

根据能量守恒定律,种子在接触土壤时的相对速度(VH,m/s)为

由式(7)、(9)和(10)可看出,种子的运动受种子与导种管间的摩擦系数、导种管的倾斜角度、导种管长度、投种高度和种子离开排种器时的初速度等因素的影响。其中摩擦系数、导种管的倾斜角度和导种管长度及结构有关,说明不同结构参数的导种管使种子产生不同形状的运动轨迹。在导种管结构参数形式及安装位置确定的前提下,影响种子运动轨迹的因素包括种子的运动时间、投种高度、种子离开排种器时的初速度。
2.2 无导种管时种子的运动分析
对于无导种管的情况,建立一个以投种点为坐标原点、以播种机前进速度的反方向为x1轴正方向、以竖直向下为y1轴正方向的坐标系O1,种子运动的各参数如图4所示。

图4 无导种装置时种子运动结构简图Fig. 4 Structural sketch of seed motion without seed guiding device
种子在下落过程中的运动可分解为竖直和水平2个运动[19]。

由式(11)可知,种子离开排种器后的运动速度与种子离开排种器时相对排种器的运动速度有关,同时也受投种角度的影响。
在运动过程中种子只受重力的作用,设种子落地的时间是t3,在0≤t<t3,时,种子的运动轨迹为
在种子下落过程中,种子在水平方向做匀速直线运动,在竖直方向做自由落体运动。
种子第一次触土时的位置满足关系式
此时种子的相对速度为

种子触土弹跳与种子速度大小有关,由式(14)可知,种子离开排种器时的初速度和投种高度影响种子入土时的相对速度进而影响种子的弹跳。通过式(12)和(13)可知,种子的运动轨迹受种子离开排种器时的初速度、投种角度和种子离开排种器后的运动时间的影响。其中种子离开排种器时的初速度与排种器的圆周速度有关,而运动时间与投种高度有关。因此,在无导种管的情况下影响种子运动轨迹的因素包括排种器的圆周速度、投种高度和投种角度。
对比式(7)、(10)、(12)和(14)可知导种管结构影响种子的运动轨迹;排种器的圆周速度、投种高度约束种子着地时的相对速度;种子离开排种器时的初速度、种子运动时间和投种角度影响种子运动;导种管的曲线形式不同,种子的运动轨迹不同。综合以上内容确定在投种过程中影响种子运动轨迹的主要因素为排种器的圆周速度、投种高度和投种角度。
3 最优工作参数试验
求出三七育苗播种机的最优工作参数是进行导种管曲线设计的前提,后续将在最优工作参数下通过高速摄像分析种子离开排种器后的下落轨迹,进而研究导种管的曲线。为研究种子离开排种器后的运动规律和运动轨迹,搭建了播种精确性试验台,并进行试验研究。
3.1 试验条件
试验在云南农业大学土槽实验室进行。土槽按照三七机械化播种要求制作,宽1 440 mm,土槽内基质与三七播种时基质一致。设计的三七播种精确性试验台如图5所示,投种角度通过不同角度护种板组合实现调节。
试验所用种子为经分级处理后的云南文山三七种子,种粒直径范围为5.5~7.0 mm,千粒质量为119.4 g,平均含水率为 60%。

图5 播种精确性试验台Fig. 5 Seeding accuracy test bench
3.2 试验因素与指标
对于播种机而言,当排种滚筒直径确定时,由于排种器圆周速度不便测量,且与机器前进速度为固定传动比,故排种器圆周速度可以由机器前进速度来代替。所以选取播种机前进速度、投种高度、投种角度为此次试验的试验因素。
种子纵向(种子沿机具前进方向)分布主要以播种粒距合格指数来评价,文献[31]以理论播种点与实际播种点距离偏差的标准差作为评价种子纵向分布均匀性的新指标。考虑三七播种的实际情况,选取理论播种点与实际播种点距离偏差的标准差为试验指标。由于三七种子的特性,种子与导种管内壁产生较多碰撞引起触土时弹跳,使种子最终位置变化,影响种子纵向分布;因此增加弹跳率作为一个试验指标来探究播种机的播种精确性,各指标的计算公式如下[9,31]:

式中,C为理论播种点与实际播种点距离偏差的标准差(以下简称标准差);Xi为第i个种子的理论播种点与实际播种点的距离偏差,mm;n为实际测量种子数;T为弹跳率,%;nt为发生弹跳的种粒数;N′为观察到的排种总数。
弹跳率的测定方法:试验时,用安放在支架上的摄像机对种子下落过程进行拍摄,试验结束后通过对种子下落视频的慢速播放来观察种子是否弹跳。若弹跳记此种子状态为1,否则为0,最后通过计算发生弹跳的种粒数与观察的总的种粒数的比例,得出此时的弹跳率。
试验包括单因素试验和二次回归正交旋转组合试验,为降低试验误差,每组试验重复3次,取平均值。
3.3 单因素试验
根据三七育苗播种机设计要求,播种机的播种速度应在6~10 m/min,设定试验时播种机的前进速度为8 m/min;按照文献[32]中的试验结果,投种高度在20~40 cm时播种效果较好,设定投种高度为20 cm。选取投种角度 15°、25°、35°、45°、55°和65°共6个水平,开展投种角度对播种精确性影响试验,试验结果见图6。

图6 投种角度与播种精确性关系曲线Fig. 6 The curve of the relation between seed release angle and seeding accuracy
由图 6 可知,投种角度在 15°~25°和 45°~65°时,弹跳率与标准差呈现出相同的变化趋势。分析原因是三七种子在触土时弹跳的增加使重播、漏播增多,使得种子的纵向分布均匀性变差,标准差变低;相反,种子弹跳减少,种子纵向分布的均匀性变好。弹跳率在投种角度为35°时达到了最低;在投种角度为55°时,标准差达到最大,并和弹跳率一起出现拐点。综合可以得出使标准差小、弹跳率低的投种角度的范围为25°~45°,此时整体播种精确性较好。
3.4 二次回归正交旋转组合试验
3.4.1 试验设计 以播种机前进速度、投种高度、投种角度为试验因素,以标准差和弹跳率为试验指标在土槽上开展三因素五水平正交旋转组合试验。根据本研究前期工作及单因素试验确定投种高度为 20~40 cm,投种角度为 25°~45°,播种机前进速度为6~10 m/min,因素编码如表1所示,试验方案及结果如表2所示,Z1、Z2、Z3为因素编码值。

表1 播种精确性试验因素水平表Table 1 Seeding accuracy test factor level table

表2 播种精确性试验方案与结果Table 2 Seeding accuracy test scheme and result
3.4.2 回归分析 利用 Design-Expert 10.0.3 对结果进行多元回归拟合和方差分析,得到标准差(P1)和弹跳率(P2)对试验因素实际值的二次多项式回归方程,并对其显著性进行检验。
1)标准差(P1)的显著性分析:由表3可知,Z2、对模型有极显著的影响,Z3对模型有显著的影响,其余因素对模型影响不显著。由F值分析可知,影响标准差因素主次顺序为Z2>Z3>Z1。将P>0.1的因素剔除[33],并再次进行方差分析,得到各因素对标准差的二次回归方程如式(17)所示:

表3 播种精确性试验方差分析1)Table 3 Variance analysis of seeding accuracy test

对式(17)进行失拟性检验,如表3所示,其中P>0.1,即失拟不显著,说明回归方程拟合较好。
2)弹跳率(P2)的显著性分析:由表3可知,Z3对模型有极显著的影响,对模型有显著的影响,其余因素对模型影响不显著。由F值分析可知,影响弹跳率因素主次顺序为Z3>Z1>Z2。将P>0.05的不显著因素剔除,并再次进行方差分析,得到各因素对弹跳率的二次回归方程如式(18)所示:

对式(18)进行失拟性检验,如表3所示,其中P>0.1,失拟不显著,说明回归方程拟合较好。
3.5 最佳参数优化
为找出既满足种子纵向分布均匀,又符合播种机播种精确性要求的参数组合,将标准差最小、弹跳率最小作为评价指标,结合因素边界条件建立参数化数学模型:

利用Design-Expert 10.0.3软件对模型进行优化求解,得到最优参数组合为投种高度20 cm、前进速度 7.781 m/min、投种角度 42°;此时标准差为51.553 mm、弹跳率为72.31%。为方便安装调试,对参数进行圆整,设置投种高度为20 cm、前进速度为7.8 m/min、投种角度为 42°;此时标准差为 51.66 mm、弹跳率为72.31%。
4 投种轨迹曲线研究
“3.5”研究结果显示,无导种管情况下播种的弹跳率和标准差不理想。为设计新型导种管,在“3.5”最优参数下,通过高速摄像技术和图像处理技术对种子的运动轨迹进行研究,以获得导种管最优曲线。
4.1 试验装置与材料
试验地点为云南农业大学试验基地,试验材料和装置包括经分级后直径范围为5.5~7.0 mm的文山三七种子、三七播种精确性试验台、千眼狼5F04M型高速摄像仪、智云CR110手持云台、电脑、白色纸板、光源等。试验过程中仪器安装及拍摄如图7所示。
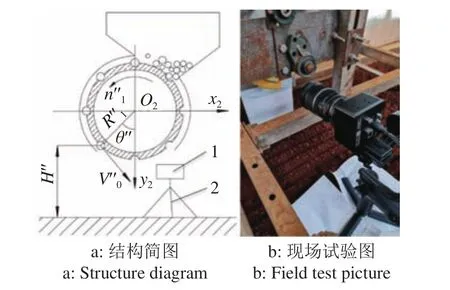
图7 图像试验仪器安装图Fig. 7 Installation picture of image testing instrument
4.2 试验方法
由于包衣的三七种子为暗红色,表面有白色粉末状的药粉,为方便观察运动轨迹和提取位置的坐标,拍摄的背景选择白色纸板。设置高速摄像仪的拍摄速度为 240 帧/s,像素分辨率为 1 280×720,保证镜头水平,适当对光线进行补偿,使其能清晰地观测到三七种子。投种角度调至42°,调整试验台减速电机,使播种机前进速度稳定在7.80 m/min,启动并设置恰当的录制时间,待试验结束后保存视频文件至电脑端。
4.3 距离标定
在摄像头视野内采集边长为 28 mm × 28 mm
根据试验结果,图像中水平距离换算标准为1像素对应0.210 93 mm;竖直距离换算标准为1像素对应 0.211 11 mm。
4.4 特征提取
将种子下落的视频以时间顺序转换为JPG格式的帧图像序列,其尺寸为1 280像素×720像素。通过对图片进行筛选并编号,共得319粒完整的三七种子下落图像。图像处理过程如图8所示。

图8 种子下落轨迹序列图像处理过程Fig. 8 Sequential image processing of seed falling trajectory sequence
4.4.1 图像预处理 对34号种子进行分析,图8a和8b为种子下落图像,图像中种子有一定的拖影,通过拖影可看出种子的轨迹。由图8可以看出前一帧图像(图8a)和后一帧图像(图8b)之间有一定的差距,可运用背景差分法进行目标提取,背景差分法是通过前图像与背景图像的差分来检测目标[35],其原理可表示为的正方形网格图像。计算正方形边长的物理长度与其对应的像素长度的比值[34],记K=B/A,其中A为正方形网格边长对应的像素长度的平均值;B=28 mm,为标定正方形网格的实际边长。

式中,fk(x,y)为前一帧,bk(x,y)为背景帧,dk(x,y)是前一帧与背景帧的差分结果。
运用差分法,可得到三七种子提取轨迹图。试验发现,在HSV空间下V分量能更易于将下落种子的轨迹与背景分离,效果如图8c所示。由于显示效果不好,为方便观察,对图8c做简单处理,把图片色温由 6 500 降到 1 500。
4.4.2 图像分割和轮廓提取 预处理后的图像更易于分割,本研究运用Otsu法进行自适应阈值二值化对图像进行分割。Otsu法是基于统计特性来计算目标和背景的最大类间方差,并找出图像的分割阈值的一种方法[36]。由于预处理后图像会存在一些噪声,阈值分割会错误地将噪声分割出来,运用形态学方法可以对二值化后的图像进行修正[37]。形态学的基本原理包括腐蚀、膨胀运算等。腐蚀是一种消除边界点,使边界向内部收缩的过程,可以用来消除小且无意义的物体;而膨胀是将与物体接触的所有背景点合并到该物体中,使边界向外部扩张的过程,可以用来填补物体中的空洞[37]。本研究将二值化后的V分量图先通过连通域面积阈值过滤,然后再进行腐蚀和膨胀运算,得到如图8d所示的缺失的种子轨迹图,最后将2幅图像进行异或运算得到近似完整的种子轨迹图(图8e)。为更方便地提取出种子的运动轨迹,对异或后的图像进行形态学骨架提取,并取反得到轨迹线的大致形状,如图8f所示。
4.4.3 曲线拟合 首先在每粒种子的图像中拾取3~5个点以方便对其轨迹进行二次曲线拟合,如图9a所示。然后根据像素坐标系与世界坐标系之间的不同关系[37],对坐标系进行转换,得到三七种子在世界坐标系中实际的运动情况。最后按照此方法处理109颗种子图像并对拟合出的曲线进行汇总,得到图9b的整体拟合曲线。由图9b可知,种子的运动轨迹呈抛物线的形式。

图9 曲线拟合图Fig. 9 Curve fitting chart
由于曲线过于密集,为方便找出规律,对种子拾取的点进行分析,其散点坐标如图9c所示。在寻找曲线过程中,为了保证数据的可靠性,对数据进行数理统计,发现80%种子集中在区域一,另外的20%集中在区域二,如图9c所示。为达到更明显的拟合效果,选择区域一,对其边界进行拟合,并以拟合好的2条边界曲线横坐标中点为标准点,拟合出曲线,拟合效果曲线如图9d所示,拟合得到曲线方程为式(21),拟合方程的确定系数R2=0.999 7。

依据前期试验基础设定播种机前进速度为7.8 m/min,排种器转速为 13.7 r/min,投种角度为42°;则种子离开排种器时的初速度为0.138 m/s。由式(21)计算出三七种子的理论下落曲线图9e。由于种子的运动轨迹更加接近二次曲线,在利用Matlab软件进行曲线拟合过程中,通过Cure Fitting Tool工具箱,利用多项式逼近(Polynomial approximation)中的二次多项式(Quadratic polynomial)的形式对曲线进行拟合。首先,结合2条曲线进行描点,然后,通过所描绘的点进行曲线拟合,得到最终的曲线方程式,如式(22),拟合后确定系数为0.999 5,说明拟合度较高,据此曲线形状设计导种管的轮廓曲线。

5 基于EDEM仿真的导种管设计与试验
导种管的研究包括导种管曲线及截面的研究,“4.4.3”已研究出导种管轮廓曲线,现对导种管截面尺寸进行研究。三七种子在离开排种器落入种沟前,由于种子质量不同、在型孔内姿态不同等因素,可能有横向(在水平面内垂直机具前进方向)位移,种子的横向位移分布决定着导种管截面尺寸。对种子横向位移采用EDEM 软件进行研究,根据“3.5”结果,设置投种角度为42°,投种高度为20 cm,播种机前进速度为7.8 m/min;将种子设置为多球面聚合颗粒(图10a),根据三七种子三轴尺寸[38],将种子长、宽、高分别设置为 6.35、5.67、5.24 mm。排种滚筒轴向不同窝眼的排种质量相互独立,为缩减仿真所需时间,取排种滚筒轴向1/5段进行仿真。通过三维建模软件建立简化后的排种器三维模型并导入EDEM中,仿真模型如图10b所示。根据文献[39]所研究的种子与ABS塑料的接触参数,在EDEM进行相应参数设置,仿真结束后对排种器下方种子流切片,分析其横向偏移量。
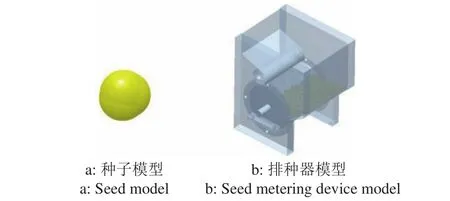
图10 EDEM仿真模型Fig. 10 EDEM simulation model
将种子无横向偏移下落时的横向坐标作为种子下落理论横向坐标,将仿真获得的种子在投种口下方20 cm处时横向坐标与理论横向坐标做差运算以求得种子横向偏移量;仿真结束后,种子的横向偏移量分布如图11所示。

图11 种子横向偏移量分布Fig. 11 Distribution of seed lateral offset
从图11中可以看出,93.3%的种子横向偏移量为0~13 mm,故将排种器出口截面的横向尺寸取为26 mm。根据图9c可知区域一种子流下方的宽度约为30 mm,故将出口截面尺寸设置为26 mm×30 mm。导种管采用向后(播种机前进方向为前方)倾斜逐渐收缩的矩形端面有利于形成均匀粒距[40];“3.5”试验得出的最佳投种角度为42°,投种高度为20 cm,结合导种管安装空间的综合考虑,将导种管入口截面尺寸设置为出口截面纵向尺寸的2 倍即 26 mm × 60 mm。为了避免卡种,将导种管截面的横向边界设计成圆弧;导种管中间部分根据公式(22)和图9f曲线进行过渡,末端对曲线进行延长并优化。
根据曲线方程以及截面尺寸,在Solidworks中建立导种管的三维模型(图12a),运用3D打印技术对导种管进行加工。为减少种子在导种管内碰撞引起的触土弹跳,导种管材质采用韧性较好的高性能软尼龙材料,加工效果如图12b所示,安装到试验台上之后效果如图12c所示。
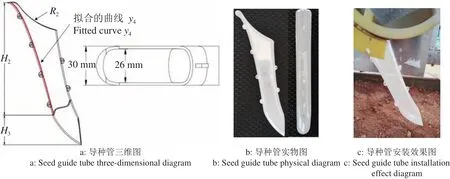
图12 拟合曲线型导种管Fig. 12 Fitting curve-shaped seed guide tube
导种管圆弧半径R2的大小与护种板圆弧半径的大小一致,保证了导种管的安装角度;拟合曲线设计高度H2为170 mm,过渡放样曲线高度H3设计为15 mm。将导种管安装到样机上进行土槽试验。试验时,采用和“3.3”“3.4”一致的土槽条件,先对种床进行精整,用本研究前期开发的压轮仿形开沟器[41]开沟,建立良好的种床条件,试验用种子为云南文山三七种子,设置投种高度为 20 cm、播种机前进速度为 7.8 m/min、投种角度为42°,验证试验重复3次,开沟及播种效果如图13所示。3次验证试验结果平均值如表4所示。

图13 开沟及播种效果Fig. 13 Ditching and sowing effect

表4 新型导种管播种验证试验结果Table 4 Verification experiment results of seeding with new seed guide tube
根据验证试验统计结果,标准差平均值由无导种管时的51.66 mm降至26.90 mm,弹跳率平均值由72.31%降至45.20%,标准差和弹跳率明显减少;证明在有导种管约束的情况下播种,从导种管排出的种子流更加稳定有效,播出的种子纵向分布更加均匀,粒距均匀性增加,播种精确性提高。
6 结论与讨论
1)通过分别建立有无导种管情况下种子运动的力学模型,找出影响种子离开排种器后运动的共同因素为排种器的圆周速度、投种高度和投种角度。
2)对投种角度进行单因素试验,得到整体播种精确性较好的范围为25°~45°。以播种机前进速度、投种高度、投种角度为试验因素,以标准差和弹跳率为试验指标进行三因素五水平二次正交旋转组合试验,通过Design-Expert 10.0.3软件优化得出无导种管条件下排种器最优投种参数组合为投种高度 20 cm、投种角度 42°、播种机前进速度 7.8 m/min,此条件下标准差为51.66 mm,弹跳率为72.31%。
3)在最优投种参数组合条件下,基于高速摄像和图像处理技术对种子离开排种器后的轨迹曲线进行分析,得出种子的轨迹曲线方程为并通过种子轨迹分布范围得出种子纵向偏移量为30 mm;通过EDEM软件仿真得到种子横向偏移量为26 mm;为了提高播种精确性,最终得到出口和入口截面尺寸分别为26 mm×30 mm 和 26 mm×60 mm,据此设计试制出导种管。
4)根据得到的导种管尺寸数据,运用3D打印技术试制出导种管,并进行验证试验。经验证试验得出,种子粒距纵向分布均匀性增加,标准差为26.90 mm,弹跳率为45.20%,新型导种管满足了三七育苗播种农艺要求,为播种机导种管的田间播种应用提供了参考依据。
从本研究结果看,加装导种管之后的标准差与弹跳率明显降低,虽然弹跳率降低幅度小于标准差,但种子纵向分布均匀性增加,说明导种管的约束作用较好,使得在弹跳率不是很理想的情况下,播种精确性也得到保障。深入分析弹跳率还不够理想的原因主要有3个:第1,三七种子质量不均匀导致三七种子在导种管内的运动轨迹有偏差;第2,在导种管曲线优化设计时,选用80%的种子轨迹作为约束,导致其余20%的种子可能会与导种管壁碰撞;第3,本研究导种管材料为能吸收种子碰撞能量的高性能软尼龙材料,若导种管采用更软质材料则吸收碰撞效果会更佳,后续将对导种管材料展开研究。
猜你喜欢
中国农业文摘-农业工程(2022年5期)2022-11-23
新疆农机化(2022年1期)2022-03-02
农机质量与监督(2021年9期)2021-12-27
农业技术与装备(2021年3期)2021-12-01
今日农业(2020年22期)2020-12-14
农民致富之友(2019年22期)2019-08-16
心理学报(2019年7期)2019-07-06
农民致富之友(2019年16期)2019-07-01
中国高新技术企业(2016年30期)2016-12-20
心理技术与应用(2015年9期)2015-12-26
