3-CUR轮腿式机器人步态规划与仿真分析
2022-01-13 03:33丰玉玺杜昱东张维朋
机械设计与制造 2021年12期
丰玉玺,李 清,,杜昱东,张维朋
(1.中北大学机械工程学院,山西 太原 030051;2.宁波财经学院,浙江 宁波 315175)
1 引言
随着科学技术不断的发展,轮腿式机器人应用范围不断的扩大,如太空探索、矿井检测、救灾救险等非常复杂的环境[1-3]。当机器人在平坦地形中工作时,依靠车轮装置移动;在复杂恶劣的环境中工作时,通过腿部越障前行,增强了轮腿机器人地形适应性,是移动机器人中的研究热点[4]。
文献[5]提出一种含有腰关节的移动机器人,可以越过10cm左右的障碍物;文献[6]研发了一种5-DOF的四足移动机器人,对小跑步态进行了研究;文献[7]设计并开发了一种新型的六足轮腿移动机器人,解决移动机器人在复杂地形中适应性较弱的一系列问题;文献[8]设计了一种平行四连杆轮腿式移动机器人;文献[9]研发的WS-2轮腿式机器人,具有良好的越障性能;文献[10]上海交通大学所开发的越障的机器人,具有优越的运动性能。
这里提出了一种基于3-CUR并联机构的轮腿式机器人,通过并联机构的动平台实现移动,提高了轮腿式移动机器人的承载能力。
2 3-CUR轮腿式机器人的结构
3-CUR并联机构是由动平台、定平台及3条支链构成,如图1所示。其中3条支链均为CUR结构,转动副R与动平台动相连,圆柱副C的转动轴线垂直于定平台并且布置在定平台的三个顶点处,虎克铰U与圆柱副C紧连,通过连杆将虎可铰U与转动副R连接。在运动过程中,3个圆柱副C中的移动副作为主驱动,转动副作为被驱动。
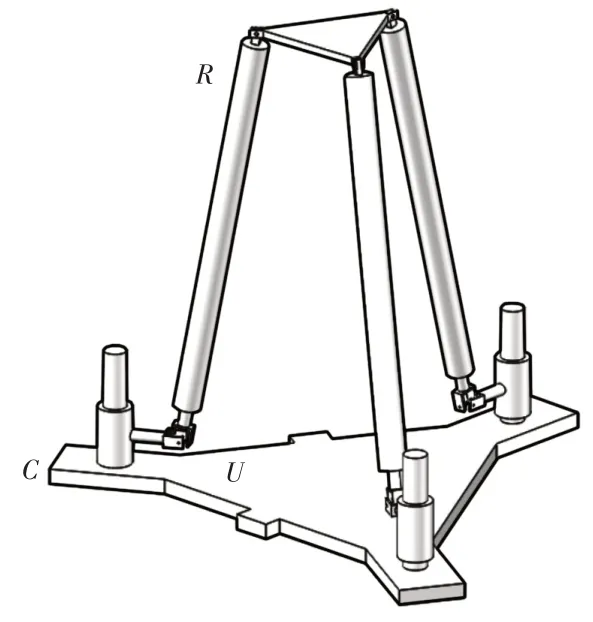
图1 3-CUR并联机构Fig.1 3-CUR Parallel Mechanism
3-CUR 轮腿式机器人三维模型,如图2所示。机器人的采用四个独立的轮腿系统,且每一对轮腿系统中的轮与腿相互独立,轮系统两两对称的分布在机器人的两侧。如图3所示,每个轮通过交流电机独立的驱动。如图4 所示,腿部为三支链的并联机构均为CUR结构,在3-CUR并联机构的定平台上端装有驱动电机,对每条腿进行独立的控制,在定平台与机架平行处设有两个滚珠丝杠,通过驱动滚珠丝杠,使得整个腿部上下移动,进行轮腿切换。

图2 机器人整体结构Fig.2 Overall Structure of the Robot

图3 轮部的局部结构Fig.3 Local Structure of the Wheel Structure
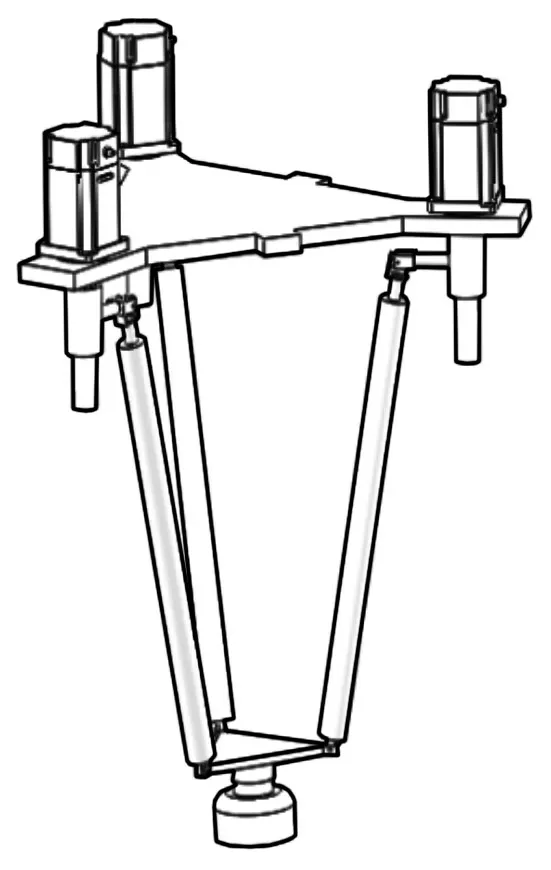
图4 腿部结构Fig.4 Leg Structure
3 自由度分析
3-CUR并联机构是每个支链都是一样的,以其中的一条支链建立螺旋坐标系,如图5所示。通过分析一条支链的螺旋,就可以得到全部支链的螺旋情况。
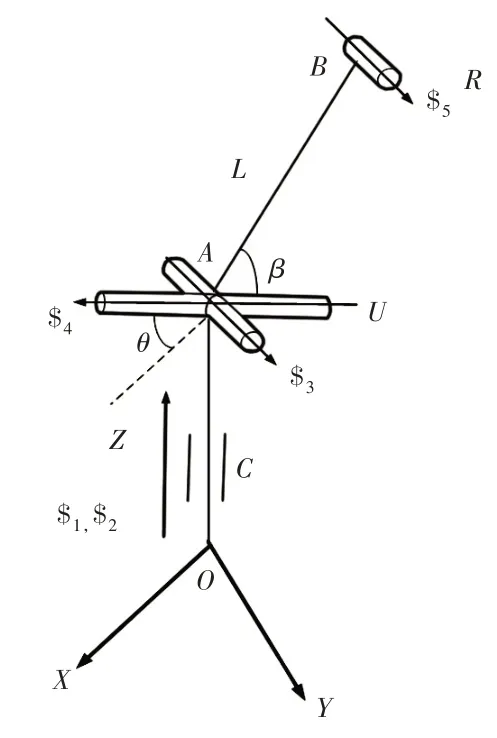
图5 3-CUR并联机构支部螺旋系Fig.5 3-CUR Parallel Mechanism Branch Spiral System
一条CUR支链,有5个运动副,其中包含1个移动副P、4个转动副R;设OA=h,AB=L,各个运动副轴线的螺旋可以表示为:

根据(2)可知,该机构支链反螺旋为一个约束线矢力。该机构3个支链完全相同,且三个约束线失力分布在不同的平面上,所以机构的阶数d=6。
应用修正Kutzbach-Gru¨bler公式可求得3-CUR并联机构的自由度为:

式中:M—机构的自由度;d—机构的阶数;n—包括机架在内的构件数目;g—机构中运动副的数目;fi—第i个运动副的自由度数;v—机构中冗余约束数,该机构没有冗余约束。
由式子上述计算结果可知,3-CUR并联机构的自由度为绕x轴和y轴的转动和沿z轴的移动。
4 四足机器人步态规划
四足机器人是通过动平台的移动实现行走,在行走的过程中采用静态模式,即机器人在这种模式下,有三条腿是接触地面的,剩余一条腿为腾空运动[11-12]。经分析,这里选取负载因子β=0.75进行研究。根据先摆动前腿,还是先摆动后腿,可以分为12种步态,如表1所示。
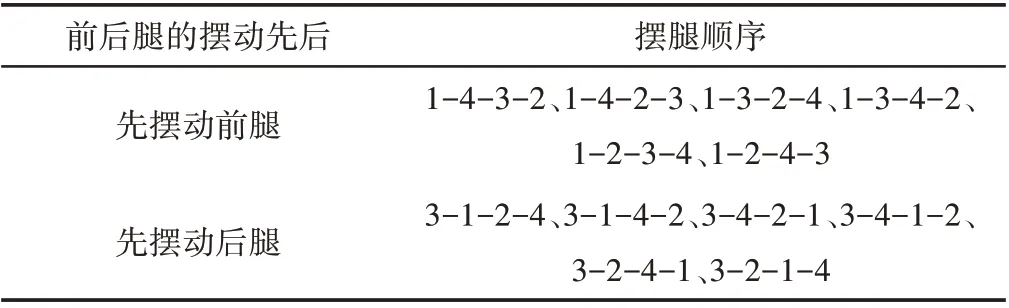
表1 3-CUR并联移动机器人步态方式Tab.1 3-CUR Parallel Mobile Robot Gait Mode
4.1 运动空间需求量对比分析
为维持静态平衡,通过运动空间需求量对各种步态进行分析,以1-4-3-2步态为例子进行分析,如图6所示。图中:L—静止状态下前腿和后腿距离;l—步长。

图6 步态1-4-3-2空间需求量Fig.6 Gait 1-4-3-2 Spatial Requirements
由图6可知,并联移动机器人的步态为1-4-3-2时,空间需求量为L+λ。通过上述原理可求出其余11种步态的空间需求量。经过研究分析,3-1-2-4、3-4-2-1、3-2-4-1、3-2-1-4四种步态的空间需求最小,为L。
4.2 稳定裕度对比分析
为保证机器人在行走过程的稳定性,通过稳定裕度进行分析,稳定裕度越大则机器人越稳定。以步态1-4-3-2为例,分析机器人的稳定裕度,如图7所示。
如图7所示,当迈出1号腿的时候,并联移动机器重心G向后移动到了G’点,稳定裕度为:

图7 步态1-4-3-2稳定裕度Fig.7 Gait 1-4-3-2 Stability Margin
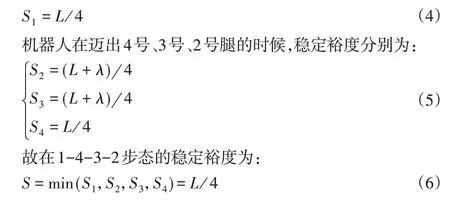
同理,我们可以得出其余11种步态的稳定裕度。12种步态方式中,5种步态的最稳定裕度值为(L-λ)/4,其余7种稳定裕度值为L/4,分别为:1-4-3-2、1-4-2-3、1-3-2-4、1-3-4-2、1-2-3-4、1-2-4-3、3-4-2-1。
4.3 步态的选择
通过运动空间需求量和稳定裕度,分析12种步态,选取一种既满足空间需求量小,又满足稳定裕度最大的一种步态方式。
满足最小空间需求量和最大稳定裕度的步态只有一种,即3-4-2-1,如表2所示。
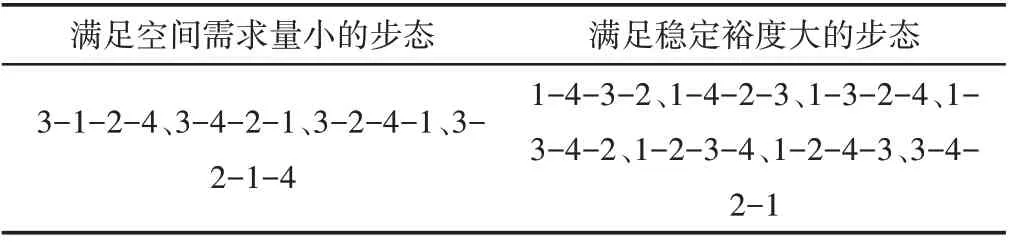
表2 空间需求量和稳定裕度对比表Tab.2 Comparison of Spatial Demand and Stability Margin
5 仿真分析
利用SOLIDWORKS 对机器人在平地上和沟壑地面上行走进行仿真分析。该机器人轮式运动特性与其他四轮移动机器人一样,不再进行研究。
5.1 平地仿真分析
在平地上行走时,电机的转速设为40r/mm,仿真的时间为12s(一个步态周期),各腿的运动规划,如表3所示。通过SOLIDWORKS中的motion插件仿真分析,机器人行走状态的最大步长与步高为l=101.75mm,h=122mm,完全可以跨越轮模式无法跨越的障碍。

表3 各时间段内腿部的运动状态Tab.3 Leg Movement During Each Period
在平地行走时质心在X轴、Y轴、Z轴的变化曲线,如图8~图10所示。一个步态周期中,X轴上的偏移量代表在一个步态周期前行距离;在Y轴方向上的偏移量为负值,且在(3~9)s之间幅值最大为-0.55mm,幅值非常小,表明机器人在行走的过程有轻微的晃动;Z轴方向上的偏移量,代表机器人的上下颠覆的情况,在(11~12)s 这个时间段内,机器人在Z轴方向上的偏移量急剧上升然后到11.5s时开始下降,说明该机器人在平地行走时仅有不足3mm的震动,基本趋于稳定,可见机器人在平地行走时,平稳性良好。
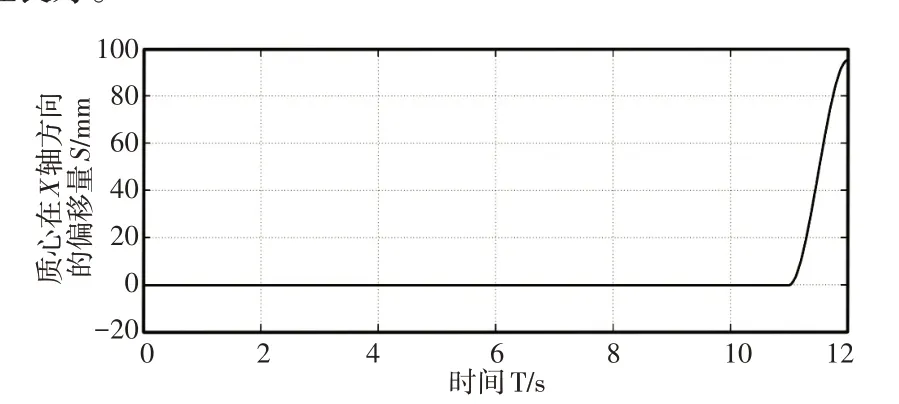
图8 质心在X轴上的偏移量Fig.8 The Offset of the Center of Mass on the X-axis
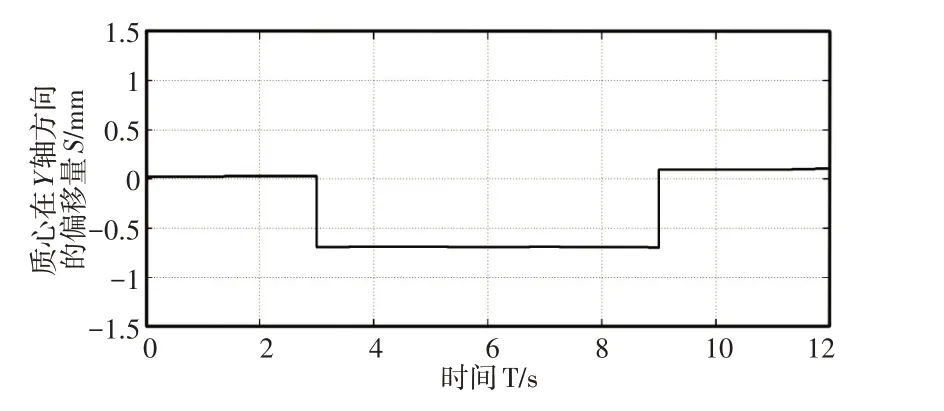
图9 质心在Y轴上的偏移量Fig.9 The Offset of the Center of Mass on the Y-axis
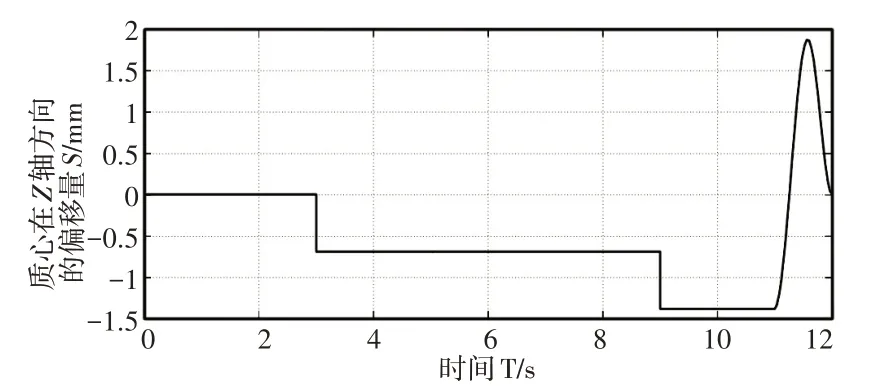
图10 质心在Z轴上的偏移量Fig.10 The Offset of the Center of Mass on the Z-axis
5.2 沟壑地面行走仿真分析
机器人在跨越沟壑时的运动过程分为了三步:前腿跨越沟壑、平地步态调整、后腿跨越沟壑。平地步态调整为了使后腿拥有前腿跨越沟壑时的位置,使得后腿能够跨越沟壑,进而完成跨越沟壑的过程,如图11所示。

图11 跨越沟壑时的运动过程Fig.11 Motion Process Across a Gully
跨越沟壑时质心在X轴、Y轴、Z轴的变化曲线,如图12~图14所示。可以看出(0~11)s为前腿跨越沟壑的过程,(11~22)s为后腿跨越沟壑。从整个跨域过程可以得到机器人在跨越时沿Y轴有轻微的晃动,其幅值很小,可忽略不计;图12 表明(2~3)s、(10~11)s时机器人在轴开始有偏移量,这说明在这个时间段整机在步态的作用下开始移动。机器人在3s、6s、14s、17s时质心在Z轴方向的偏移量较大,说明机器人在跨越沟壑时比在平地行走波动幅度大。
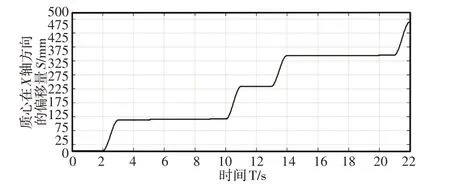
图12 质心在X轴上的偏移量Fig.12 The Offset of the Center of Mass on the X-axis

图13 质心在Y轴上的偏移量Fig.13 The Offset of the Center of Mass on the Y-axis

图14 质心在Z轴上的偏移量Fig.14 The Offset of the Center of Mass on the Z-axis
6 结论
这里所研究的轮腿式机器人采用轮腿相互独立的设计,相互不会发生干涉。通过对3-CUR并联机构进行自由度分析,得到其具有3-DOF(两转一移),其满足移动机器人腿部设计的要求。由于采用了3-CUR并联机构,极大的提升了轮腿式移动机器人的承载能力。从四足移动机器人的运动空间的需求量和最大稳定裕度这两个方面来进行考虑,确定该机器人的最佳步态。通过仿真分析,得出该机器人在3-4-2-1步态下的最大步长与步高,并分析机器人在平地行走和跨越沟壑时的质心的变化情况。可以发现该机器人无论是平地行走还是跨越沟壑都比较平稳,可用于复杂、危险环境的探测和救援。
猜你喜欢
地理空间信息(2022年3期)2022-04-01
中国宝玉石(2021年5期)2021-11-18
文萃报·周五版(2020年15期)2020-04-22
制造技术与机床(2017年7期)2018-01-19
测绘工程(2017年3期)2017-12-22
西安建筑科技大学学报(自然科学版)(2016年5期)2016-11-10
电测与仪表(2016年2期)2016-04-12
核科学与工程(2015年2期)2015-09-26
电测与仪表(2015年5期)2015-04-09
电测与仪表(2014年15期)2014-04-04