单GPS 定位系统在扭王字块水下安装中的应用
2022-01-12 02:56刘大为翟永贞
港工技术 2021年6期
刘大为,翟永贞
(中交第一航务工程局第一工程有限公司,天津 300456)
1 各扭王字块安装工艺优缺点比较
阿尔及利亚斯基克达油气港改扩建工程项目两座新建防波堤海侧采用预制扭王字块护面,最大的扭王字块规格达到16 m³和20 m³,安装最大水深约-17 m,垫层石坡比为3:4。扭王字块采用海上起重船和陆地起重设备相结合的方法进行安装。本项目扭王字块安装是基于CLI 专利要求,与国内传统的扭王字块安装规则有较大的区别,其中最突出的一个差异在于,尽管都是定点随机码放,但国内相邻两块体会“碰块”,即块体安装时,待安装块体与已安装块体碰撞后即可脱钩。本项目CLI 专利公司对块体的要求是同排相邻两块体之间是有间距的,不可接触,且间距的大小跟块体的规格有关系。由于水下环境不可视,块体安装的精度直接影响了块体的勾连效果和整体防护结构的稳定性。
本项目设计的扭王字块单GPS 接收机定位系统独创性的只使用1 台GPS 接收机和手簿即可实现大型扭王字块的水下快速安装。
各扭王字块安装工艺的优缺点如表1 所示:

表1 各种扭王字块安装工艺的优缺点
2 单GPS 接收机定位系统构成
该系统由两部分构成,第一部分为GPS 定位系统,包括GPS 接收机一台,手簿一台;第二部分为固定系统,通过脚手管将GPS 接收机与起重设备的钢丝吊索固定在一起。具体的安装顺序为:
1)截取三段脚手管,单根长度约1.2 m;
2)使用十字扣件将两根脚手管呈水平方向与钩头下方钢丝绳连接;
3)将第三根脚手管通过十字扣件与前两根脚手管连接;
4)将GPS 接收机插入至第三根脚手管内,并调整十字扣件,使得GPS 天线中心位于钩头垂线上;
5)通过GPS 手簿实时显示的偏移数据,将扭王字块安装在正确位置。
3 单GPS 接收机定位系统误差分析与修正
3.1 误差来源
在安装扭王字块时,块体会受到风浪影响而影响精度。这是所有安装方法所面对的共性问题,但相比较于块体自身的重量,这些外在因素对块体安装精度的影响甚微。
系统误差主要来自于GPS 接收机与“三心一线”之间的偏差。三心,指的是起重设备钩头中心、自动脱钩器中心和待安装块体中心。一线,指的是上述“三心”所形成的铅垂线。在重力作用下,起重设备的钩头中心、自动脱钩器中心和块体重心必将保持在同一条铅垂线上,否则将会产生偏心力矩,无法保持稳定状态。如果安装的GPS 接收机天线中心偏离了此条铅垂线,误差便由此产生。此时,GPS 接收机所显示的坐标数据将与待安装块体中心产生差异,差异值的大小取决于GPS 天线中心距离铅垂线的距离。
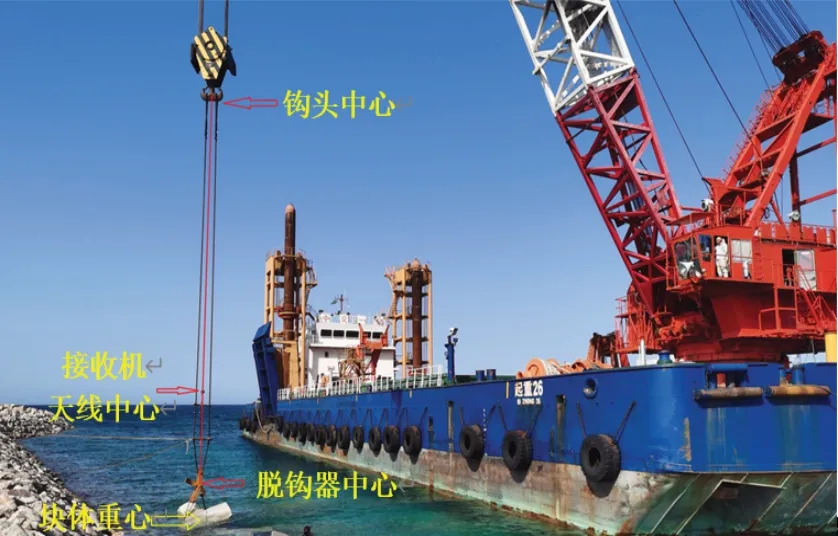
图1 “三心一线”示意图
3.2 误差修正方法
为消除GPS 接收机与铅垂线不一致带来的系统误差,需要在此定位系统安装完毕后,使用双全站仪呈90°两个方向进行校核和减少该误差。具体流程为:
1)在起重设备钩头下方钢丝绳上安装好两根水平脚手管和自动脱钩器,并在脱钩器下方挂上扭王字块,使得钢丝绳处于绷紧状态。根据项目块体安装区域的水深,适当调整水平脚手管距离自动脱钩器的位置,使其处在水面上方2~3 m 的位置;
2)在正面架设一台全站仪,使得目镜十字丝竖丝对准钩头中心、自动脱钩器中心;
3)在两根水平脚手管上做好铅垂线标记然后安装GPS 接收机;在测量人员的指挥下,将GPS接收机中心与棱镜十字丝竖丝重合;
4)在垂直方向架设另外一台全站仪,在测量人员的指挥下调整GPS 接收机的位置,使其与棱镜十字丝竖丝重合;
5)反复在相互垂直的两个方向上调整GPS 接收机中心位置,直至其与棱镜十字丝竖丝重合。
3.2 系统误差检验
单GPS 接收机定位系统安装并调试完毕以后,检验该定位系统的系统误差。
1)在无风的天气选一开阔区域,在自动脱钩器下方挂一块混凝土块体,使得钢丝绳处于绷紧状态。块体中心位置为镂空结构形式。
2)从自动脱钩器中心往下挂一个2kg 重的线坠,操作起重设备使得线坠与地面刚好接触。根据三心一线原理,线坠的中心与块体的重心在同一平面位置(图2)。

图2 系统误差检校示意图
3)使用GPS 接收机手簿记录此点的坐标;
4)在地面上做好线坠位置的标记,操作起重设备挪开块体,并使用全站仪测量此点的坐标。
5)如此反复40 次,比较GPS 接收机和全站仪测得的数据偏差。
根据测得的数据统计,共有3个点超出2.5 cm,占比7.5 %;平均值为2.0 cm,极值为2.8 cm。表明GPS 接收机所采集的数据就是块体重心的数据,且精度可以满足项目要求。
4 实际安装效果检验
每一块扭王字块在安装就位后,在脱钩前使用GPS 手簿记录脱钩前的块体坐标。通过与理论坐标比较,来验证单GPS 接收机定位系统的安装效果。
安装后,根据记录与理论坐标比较,超过20 cm 的块体有3 个,占比3 %;最大偏差值为23 cm,平均偏差15 cm,相对于块体的尺寸而言,该偏差完全不会影响后排扭王字块与前排扭王字块勾连,精度完全满足CLI 安装要求。
5 结语
1)单GPS 接收机系统解决了传统块体定位精度不高的问题,系统误差可以控制在2~3 cm,完全可以满足CLI 安装要求。在安装和使用时,要特别注意调整接收机的位置来消除或减少该系统的系统误差;
2)该定位系统接收机处在水面以上2~3 m 位置,并非安装在起重设备爬杆顶部,解决了陆地汽车吊无法安装传统定位系统问题。且本定位系统采用无线传输数据,其传输距离只跟块体的安装跨距有关,不受起重设备扒杆工作角度影响,从而减少了传统定位系统的系统误差,提高了定位精度;
3)由于该系统定位精度较高,在待安装扭王字块到达安装位置后,即可下沉自动脱钩,无须配合潜水员反复调整扭王字块的位置,因而安装速度得到大大提高;
4)该系统不仅适用于水下大型扭王字块安装,还适用于出水以后对安装精度要求比较高的块体,适用范围比较广,有很高的推广价值。
猜你喜欢
水运工程(2020年11期)2020-11-27
航海(2020年2期)2020-05-13
长江科学院院报(2019年2期)2019-03-18
水利科技与经济(2018年6期)2018-09-01
北京航空航天大学学报(2017年4期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
系统工程与电子技术(2016年7期)2016-08-21
科技资讯(2016年8期)2016-05-14
科技创新导报(2016年5期)2016-05-14
中国科技信息(2015年21期)2015-11-07