
一种无人集群自组网网络管理系统设计
2022-01-10 07:52:40杨道锟卢艳玲张亚师王振领
弹箭与制导学报 2021年5期
杨道锟,卢艳玲,张亚师,贾 硕,王振领
(西安现代控制技术研究所,西安 710065)
0 引言
无人集群是以分布式协同控制和自组网技术为支撑的大规模低成本作战系统,具有数量众多、协同任务、协同探测、协同攻击的特点,可极大提高单一无人机节点的作战效能,是颠覆未来作战样式的一种重要形式。随着美国在2014年开始开展拒止环境下协同作战项目[1]、小精灵项目[2]、进攻性蜂群[3]项目后,英国、欧盟、俄罗斯等也相继开展了集群系统研究,国内多家研究所和高校也主要围绕蜂群任务分配、编队控制和航机规划等关键技术开展集群前沿课题研究。无人集群系统虽然具有较多优势,但也存在大规模自组网通信、网络重构、网络监控与规划等网络管理技术问题。
1 无人集群网络管理现状分析
无人集群系统执行作战任务时,通常节点数量众多,例如美国捕食者无人机在出动任务时一般采用4机编队,而在美军“阿尔法计划”仿真演示中甚至使用了 100 架无人机[4],大规模的无人机操控给地面操控人员带来了极大的挑战,需要操控人员根据集群系统的自主情况,决定介入或者辅助控制集群系统管理。
美国DARPA在OFFSET项目[3]初稿中提出要发展蜂群战术开发生态系统及支撑性的开放系统架构,包括先进的人-蜂群界面,让用户同时实时监控和指挥数量庞大的蜂群无人平台,并在项目第二阶段中将人机协同交互合同授予凯斯西储大学、查尔斯河分析公司和西北大学,并在《美国空军无人机系统飞行计划2009—2047》中提出一名操作人员将可以操控多架无人机实施“更加集中、更加持续、更具规模”的集群打击,到 2047 年完成 “观察-判断-决策-行动”(OODA)回路的时间缩短为μs,甚至ns级。操作人员的作用也逐渐由“人在回路之内”转变为“人在回路之上”到“人在回路之外”。
国内国防科学技术大学提出了大规模无人机管理与控制是无人集群系统的关键问题,需要研究空域、态势、有人干预相结合的集群管理技术[4];中国电子科学研究院在研究无人集群城市作战情况下提出人机协同技术、人机交互技术等方面的研究是无人集群作战应用的关键技术[5]。
文中通过研究无人集群系统自组网的网络管理,探讨无人集群系统实时状态感知和人机交互,为无人集群系统状态监控、集群协同侦察情报的高效展现,集群的高效控制提供思路。
2 自组网网络管理系统设计
自组网网络管理系统与无人集群系统的任务和功能紧密相关,具有无中心、自组织、网络拓扑可变、任务执行可调的特点[7-10],通过借鉴典型无人机地面站的功能和配置[11-13],提出网络管理系统应具有以下典型功能。
1)网络状态监控
能够汇集无人集群系统网络状态,并根据网络结构和集群任务情况,实时展示系统网络规模、网络结构和网络连通状态,提供任务全程的任务状态与网络状态关联情况。
2)链路状态监控
根据节点间的链路状态,实时提供节点的完整链路状态信息和整网链路情况,实时反映无人集群飞行任务的队形、移动性对链路稳定性的影响,并给出相应的告警信息,提醒操作人员关注节点的任务状态。
3)网络拓扑监控
能够结合网路状态、网络拓扑结构、任务地图,可视化展示网络受节点移动、地理环境、编队环境的影响,为操作人员提供网络拓扑与任务的动态关系。
4)网络规划管理
根据任务需求预先规划网络结构、网络流量、时隙分配状态,便于自组网快速部署,增加无人集群系统的任务执行速度和成功率。
5)全网信息管理
能够通过实时记录、分类、分析全网信息状态,快速定位故障节点和故障原因,给无人集群系统的优化、故障排除和任务临时变更提供必要的全局数据分析记录手段。
6)全网应急控制能力
在网络某一节点发生意外时,能及时定位并采取紧急控制,将故障节点转移出集群任务或设定独特的任务要求,保证整个无人集群系统的正常工作,避免节点飞行异常导致的集群系统任务失败。
7)随机接入权限管理
由于自组网网络管理可以监控、控制、记录和分析无人集群下的网络状况、节点情况和任务执行情况,因此需要严格管理操作网络管理系统人员的权限,避免因误操作或非法操作所导致的集群任务失败情况,提供安全可靠的网络管理能力。
3 自组网网络管理系统组成
自组网网络管理系统主要由通信管理、配置管理、网络状态监控、链路状态监控、告警管理、日志管理、视频管理、拓扑管理、应急管理、用户权限管理、数据分析等功能模块组成,如图1所示。
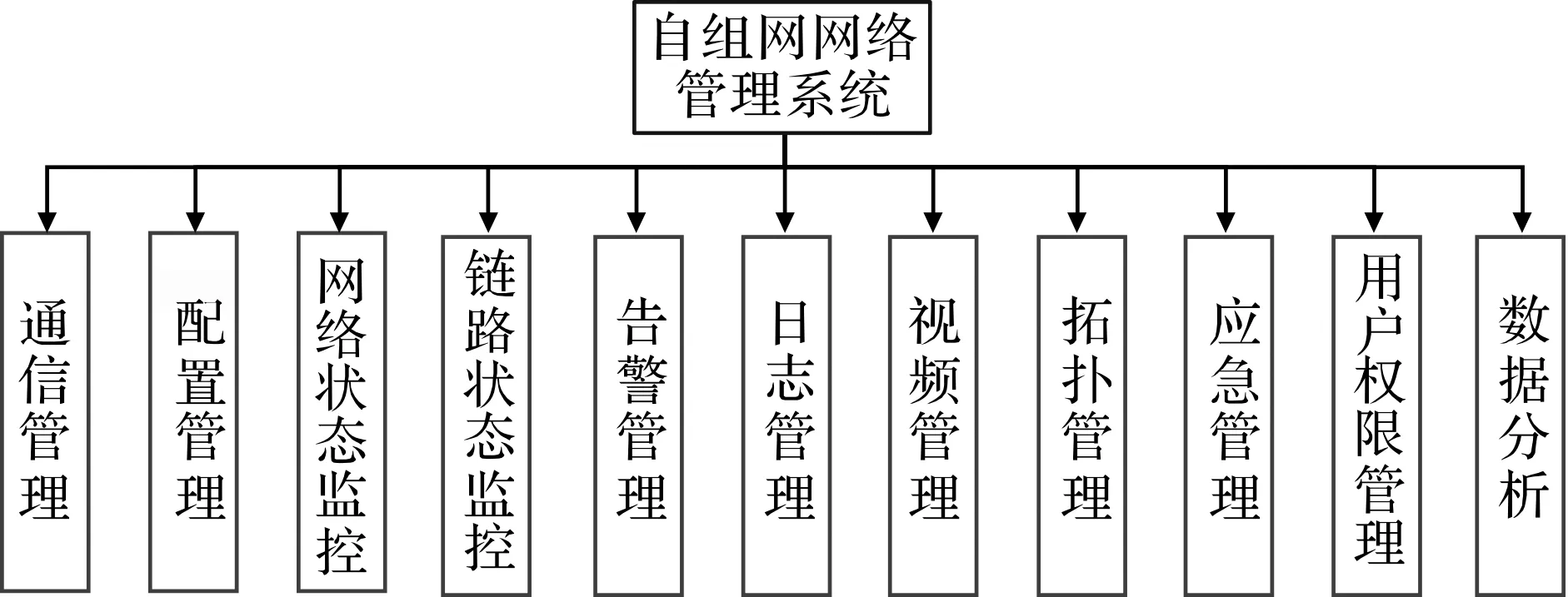
图1 自组网网络管理系统功能模块组成
4 自组网网络管理系统软件设计
为了便于自组网网络管理进行扩展,网络管理系统采用层次性结构设计,分为前端界面、后端逻辑、接口通信、数据存储等4层架构。通过设置通信接口,信息流进入到接口通信缓存中,后端逻辑对各端口缓存信息按照通信协议解析后生成相应无人集群节点群/簇状态和节点链路状态,从而产生相关的状态展示图和告警图示,并根据相关操作完成数据分析、数据存储功能。
前端界面层是自组网网络管理系统的人机交互界面,负责将无人集群自组网系统的网络状态直观、有效的展示给操作人员。为了能够将复杂繁多的无人集群网络状态有效展示出来,按照人类注意力机制,视觉的焦点集中在中心、标签等图例上,视线移动方向也倾向于左上-中间-左下-右下的方向,通过图形变化、颜色变化吸引操作人员的视线方向。界面采用一致性原则,提示、菜单、按键采用相同的颜色、大小、字体等,并在每个操作序列中增加反馈信息。
为了满足集群系统大规模无人机节点工作的情况,网络管理系统提供直观的网络状态信息,采用网络拓扑图和地图拓扑图相结合的方式,软件默认显示网络拓扑图,并允许用户开启地图拓扑图模式,地图拓扑图是网络拓扑图在地面界面上的叠加。网络拓扑图采用简单的“点-线”模式实现复杂网络拓扑的可视化,通过实时解算集群系统的群内状态、群间状态、节点状态,形成如图2所示的拓扑结构。节点在网时,该节点自动显示并根据与其他节点状态形成拓扑结构,若节点与其他节点状态变化时,节点间连线将变为黄色、红色等警示色,示意当前状态异常。节点退网时,拓扑图实时更新,消除退网节点,形成新的网络拓扑结构,并通过弹窗给操作人员提示。
为了清晰展示大规模集群节点,网络管理系统结合集群系统任务情况,将网络拓扑图按群划分,每个群代表一个子任务,操作用户根据子任务执行情况实时监控网络情况,并在任务结束后,将子任务网络拓扑图汇总,形成新的网络拓扑图。
告警图采用如图3所示的统计方式将网络中的基本状态展现给操作人员,让操作人员可以清晰的看到网络总业务流量、全网节点状态变化情况、各任务中节点状态,了解任务执行中网络状态的变化趋势,及时管理任务执行。

图3 网络告警图设计
后端逻辑主要通过C++完成,通过设置端口管理逻辑,完成拓扑图生成、地图加载、协议解析和数据分析等操作。具体流程是协议解析模块将通信接口中的数据按照通信协议解析,各模块按照自身功能解析并分析、存储数据,并实时将网络变化信息、链路变化信息、告警数据发送至前端界面,更新前端界面显示。后端逻辑操作的数据流如图4所示。
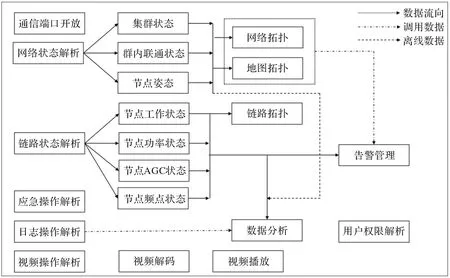
图4 后端逻辑设计
5 试验验证
通过4架实体旋翼无人机和操控软件生成的虚拟无人机进行软件烤机试验,试验结果如表1所示,网络管理软件能够较好的为操作人员提供必要的网络状态监控和管理,并及时提供节点网络异常和网络丢失的情况。
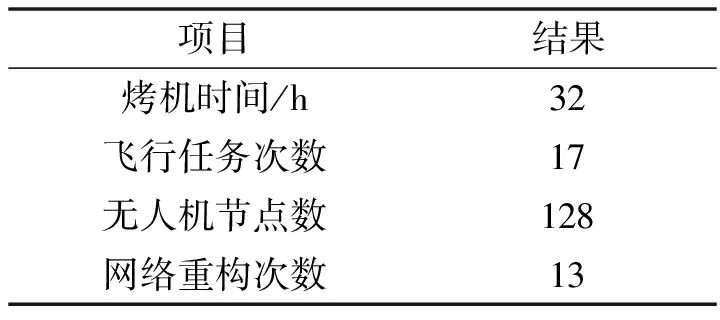
表1 试验结果
6 结束语
依据无人集群系统的工作特点,研究了自组网网络管理系统应具有的核心功能,并按照这些功能设计了一种无人集群项目的自组网网络管理系统,该系统能够实时监控自组网系统网络状态和飞行过程中各节点状态。通过该系统,操作人员从以往的单/双节点网络状态管理变成了128个节点同时管理的状态,为无人集群系统的飞行任务提供良好的操作依据。
猜你喜欢
纺织科学研究(2023年9期)2023-10-23 11:18:10
网络安全与数据管理(2022年2期)2022-05-23 13:25:46
移动通信(2021年5期)2021-10-25 11:41:48
小哥白尼(军事科学)(2019年2期)2019-04-17 02:17:28
小哥白尼·趣味科学画报(2019年12期)2019-02-28 11:55:02
电子制作(2018年23期)2018-12-26 01:01:16
岷峨诗稿(2017年4期)2017-04-20 06:26:43
汽车维修技师(2017年10期)2017-03-17 02:25:01
新高考(英语进阶)(2017年12期)2017-02-26 11:37:34
电测与仪表(2016年5期)2016-04-22 01:13:46
