并网逆变器数字化控制算法优化设计
2022-01-09 11:52:44谭令其孙晓敏李歆蔚黄杨珏赵伟
电气传动 2022年1期
谭令其 ,孙晓敏,李歆蔚 ,黄杨珏,赵伟
(1.广东省电力装备可靠性企业重点实验室(广东电网有限责任公司电力科学研究院),广东 广州 510080;2.广东电网有限责任公司,广东 广州 510060)
并网逆变器是新能源发电系统与交流电网的接口,并网电流控制算法直接关系到并网逆变器的性能。随着大规模集成电路技术的发展,微控制器(micro control unit,MCU)或数字信号处理器(digital signal processor,DSP)等数字化芯片已经广泛应用于电力电子装置的闭环控制。数字化控制通常包含AD采样、控制算法运算、输出脉
冲给定等环节,进而导致装置输出信号滞后反馈信号采样点,这是数字控制系统普遍存在且无法避免的不足。针对数字控制系统,相关学者提出无差拍控制[1]、预测电流控制[2-3]、自适应控制[4]等多种算法来克服输出滞后带来的不利影响。比例-积分(proportional-integral,PI)控制[5]是一种经典的控制算法,具有物理意义明确、实现简单、参数易于调节等优势,目前在逆变器数字化控制领域依然得到广泛应用。然而,数字控制器所存在的控制时延使得PI控制器的相角裕度减少以及闭环带宽变窄,如何提升数字化PI控制器的性能成为了研究热点。
文献[5]利用滞后网络代替传统PI控制器,然而离散化后的传递函数与传统PI控制器的结构没有任何差别,这相当于是提供了一种参数整定手段,实际上并没有解决固有问题;文献[3]指出预测电流控制就是串联了相位补偿环节的PI控制器,却未有更进一步挖掘两者的关系;文献[6]采用零极点对消的方法设计了滞后一拍的PI控制器参数,提高了控制器的带宽,但控制器性能对系统参数的依赖性较强。
本文首先分析了基于连续系统模型的并网逆变器PI参数的整定范围,指出滞后环节会显著缩减PI参数的稳定域,接着讨论了数字化控制与零阶保持器对系统性能的影响。在此基础上,以滞后一拍的数字控制系统为例,提出了采用超前环节作为PI控制器的补偿,并分析了不同参数的补偿环节对PI控制器稳定域的影响,并由此确定最优补偿参数。最后,通过仿真平台与逆变器样机验证了本文所提算法的有效性。
1 并网逆变器控制建模及分析
本文以单相并网逆变器为例,主电路拓扑如图1所示。其中,Udc为直流母线电压,Q1~Q4为全桥逆变器的四个半导体开关器件(含反并联二极管),uinv为逆变器输出电压,L为并网滤波电感,ig为并网电流,ugrid为电网电压。
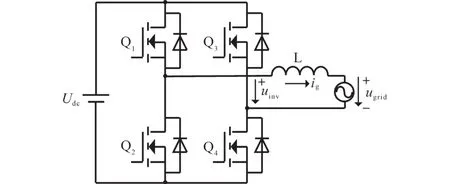
图1 单相并网逆变器主电路拓扑Fig.1 Main circuit topology of a singlephase grid-connected inverter
根据并网逆变器拓扑可列写如下电路方程:

将上式进行拉普拉斯变换可得:

1.1 基于连续模型的并网逆变器控制建模与分析
对并网电流ig采用PI控制器实现闭环控制,基于连续系统模型的控制框图如图2所示,图中e-Tds为控制时延对应的传递函数,Td为并网电流采样点与装置脉冲输出之间的时间差。Td与主控芯片工作模式密切相关,本文以Td等于控制周期Ts为例作讨论,即反馈控制的输出恰好滞后“一拍”。控制框图中的电网电压ugrid相当于是控制系统的扰动项,在电网阻抗可以忽略的情况下,它并不会影响控制环路的稳定性,而且可以通过电网电压前馈进行对消。因此,本文在进行分析时可忽视电网电压对系统影响。
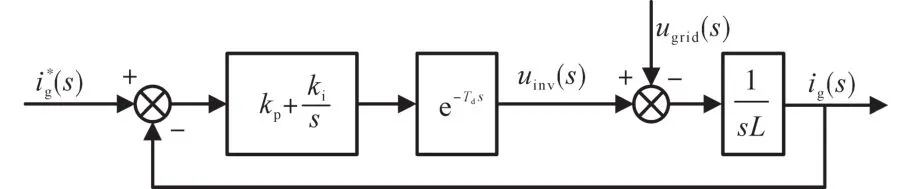
图2 基于连续系统模型的并网逆变器控制框图Fig.2 Control block diagram of grid-connected inverter based on continuous system model
图2控制框图的开环传递函数为

若Td=0,即不存在控制时延,则G0(s)=(kps+ki)/(Ls2),此时当PI控制器系数kp和ki均大于0时,开环传递函数波特图的相移在全频段均不超过-180°,系统稳定。当控制时延Td≠0时,随着频率的提升,相移显著增加,存在不稳定的可能。为了便于讨论,这里以kp>0,ki=0的情形为例。此时开环传递函数可以简化为G0(s)=kp·exp(-Tds)/(Ls),这里的exp(x)表示以自然对数e为底的指数函数,相移随角频率的变化关系式为φ(ω)=-(π/2)-Td·ω。当角频率ω=π/(2Td)时,开环传递函数相移等于180°,根据自动控制原理,该角频率对应的传递函数幅值应小于1才能保证系统闭环稳定,进而推出kp<Lπ/(2Ts),这里用Ts代替Td是因为本文讨论恰有一个控制周期时延的情况。
由此可见,滞后环节会减少控制参数的稳定域,且控制时延越大,稳定域越窄。这说明进行控制参数设计时必须充分考虑控制时延的影响,避免系统失稳。此外,上述分析是基于连续系统,仅考虑了控制时延的影响,并未考虑数字化控制时零阶保持器对系统的影响。为了更进一步分析系统性能,必须建立基于离散系统的并网逆变器闭环控制模型。
1.2 基于离散模型的并网逆变器控制建模与分析
为了更直观具体地说明数字控制系统的控制时延特性,这里以图3所示的PWM载波与调制波为例。实际数字控制器中,通常在三角波底部(即图中的A点)触发AD采样,在B点完成AD采样并触发中断进入控制算法的运算程序,在C点完成运算并向PWM缓冲寄存器赋值,到下个周期的起始位置D点,PWM缓冲寄存器的值装载到实际的PWM比较寄存器,同时重复上一个周期的流程,这就是基于数字控制系统的并网逆变器控制环路典型时序。需要注意的是逆变器的输出为脉冲波,而本文所指是输出电压则是指考虑等面积法则时一个周期内的电压平均值。
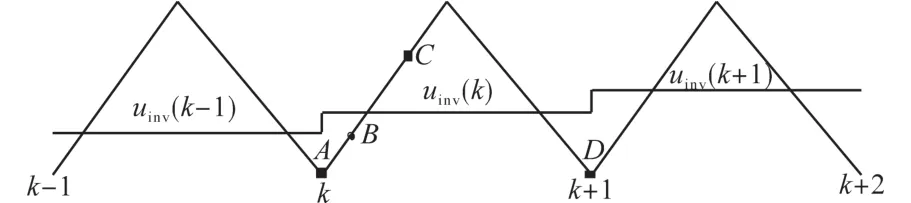
图3 并网逆变器控制时序示意图Fig.3 Control sequence diagram of grid-connected inverter
为了更准确地刻画实际控制系统,下面采用离散系统模型进行分析。将式(1)进行离散化,可得:

式中:uinv(k)为逆变器在第k个周期内的平均输出电压;ig(k)为第k个周期起始点的并网电流采样值;ugrid(k)为电网电压在第k个周期内的平均值。
由此,我们可以得到基于离散系统的控制框图如图4所示,图中z-1表示一拍控制滞后环节。

图4 基于离散系统模型的并网逆变器控制框图Fig.4 Control block diagram of grid-connected inverter based on discrete system model
由控制框图可得到系统闭环传递函数为

系统是否稳定取决于闭环传递函数的极点是否都在单位圆内,根据Jury判据我们可算出使得系统稳定的控制参数取值范围如下:
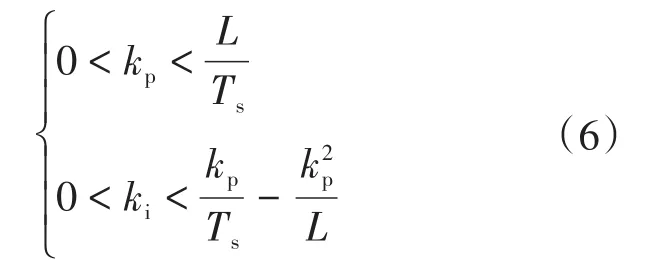
式(6)表明,考虑了逆变器输出电压的非连续可调,即零阶保持器的作用,控制参数的稳定域会进一步缩窄。特别地,这里仍然以积分系数ki=0的情况为例,此时由式(6)可得到比例系数的取值范围是kp<L/Ts,这比仅考虑控制时延的连续系统模型所得到的范围kp<Lπ/(2Ts)更小。因此,对实际逆变器进行电流环控制参数整定时,必须考虑数字控制器的作用,即保证控制参数在式(6)所限定的范围,防止系统失稳。
此外,控制时延对系统的阶跃响应也有着明显的影响。针对上述提到的逆变器闭环控制系统,本文以并网滤波电感L=3 mH为例,根据二阶系统的特性并综合考虑逆变器的静态误差、响应速度、超调量、稳定裕度等要求,取kp=15,ki=50 000,分别画出连续系统模型(不考虑延时)以及离散系统模型(控制周期Ts=50 μs)的阶跃响应曲线,如图5所示。
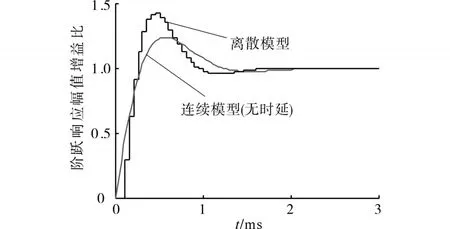
图5 控制系统在连续模型与离散模型的阶跃响应对比Fig.5 Comparison of step response for control system based on continuous model and discrete model
由图5可知,数字控制器的固有时延与零阶保持器使得系统超调量增大,阶跃响应的特性发生显著变化,根据连续系统模型所设计的参数可能无法满足实际系统要求。基于此,一方面从控制系统建模的角度考虑,应该以离散系统模型为分析目标进行控制参数设计;另一方面从提升电流环性能的角度分析,应通过控制器的优化设计来削弱控制时延带来的不利影响,使数字控制系统与连续控制系统更接近,这也是本文的研究重点。
2 基于超前环节的PI控制器优化设计研究
2.1 超前环节的设计与分析
根据上述分析,数字化控制器所存在的固有控制时延会恶化逆变器的控制性能,不仅使控制器的参数稳定域缩窄,而且还使系统阶跃响应超调量增大。从传递函数的角度分析,控制时延环节只会使环路信号的相位出现滞后,对信号幅值并没有产生影响,因此可以考虑在控制环路中加入具有相位超前特性(即相移为正)的传递函数来削弱控制时延的影响。单纯从数学角度分析,在控制环路中串联传递函数H(z)=z即可完全抵消滞后环节z-1,但这在实际中是物理上不可实现的,因为传递函数分子的阶数必须小于等于分母的阶数。因此,我们对上述传递函数调整为下式所示的结构:

其中,α为相位补偿系数,1+α为归一化系数,以保证传递函数在低频段具有单位增益;0<α≤1是为了使传递函数具有相位超前特性并保证C(z)是一个最小相位系统,即极点均在单位圆内。当α取不同范围的值时,C(z)的特性会随之变化:随着α的增大,在中低频段,C(z)在相同频率下的相移不断增加,即对于滞后环节的补偿能力不断增强,而且幅频特性也随之略有增大。这里分别取α为0.1,0.3和1,画出C(z)的波特图,如图6所示,其变化趋势与上述分析一致。
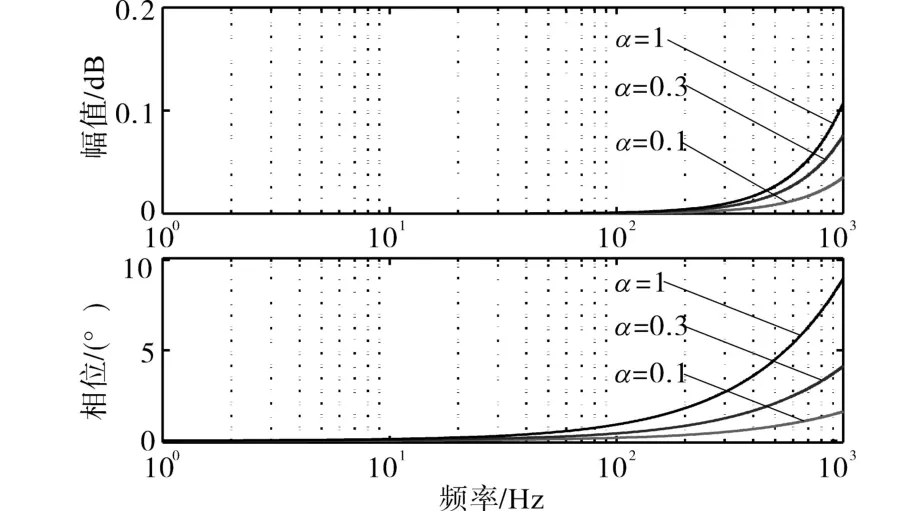
图6 不同α取值下C(z)的波特图Fig.6 Bode diagram of C(z)with difference α
2.2 含超前补偿环节的控制环路特性分析与实现
针对图4所示的并网电流控制系统,加入形如式(7)结构的超前补偿环节后的控制框图如图7所示。

图7 含有超前补偿环节的并网逆变器控制框图Fig.7 Control block diagram of grid-connected inverter with lead compensation
图7中,GPI(z)和C(z)分别为PI控制器与超前补偿环节的传递函数。此时系统的闭环传递函数为

类似地,根据Jury判据可算出使得系统稳定的控制参数取值范围如下:
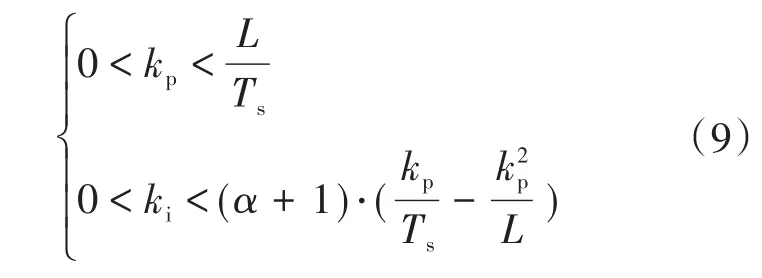
将式(9)与式(6)对比可知,加入补偿环节后,PI控制器中比例系数kp取值范围未发生变化,但积分系数ki的取值范围将随着α的增加不断扩大。当α=1时,积分系数所允许的取值范围达到最大,是未加入补偿环节的两倍,从提升参数稳定域的角度分析,取α=1是最优的补偿方案。尽管针对实际系统,我们通常可以得知并网滤波电感值,结合开关频率即可设计出保证系统稳定的控制参数,稳定域的拓宽看似意义不大。但对于大功率的逆变器,受限于功率器件的能力,开关频率一般较低,如果不对稳定域进行拓宽,控制参数可以选择的范围将变得很窄,进而限制了控制系统的性能,本文所提出的补偿策略能有效缓解这个问题。
另一方面,从阶跃响应的角度进行分析,画出α在不同取值下的闭环系统阶跃响应特性,如图8所示。由图8可知,随着α取值的增加,数字控制系统的阶跃响应超调量逐渐减少,与不考虑控制时延的连续模型的阶跃响应越来越接近,这是因为随着α的增加,相位补偿效果愈加明显,结果与理论分析吻合。这同样说明α=1时动态性能及补偿效果最佳,因此这里选定相位补偿环节的系数为α=1。
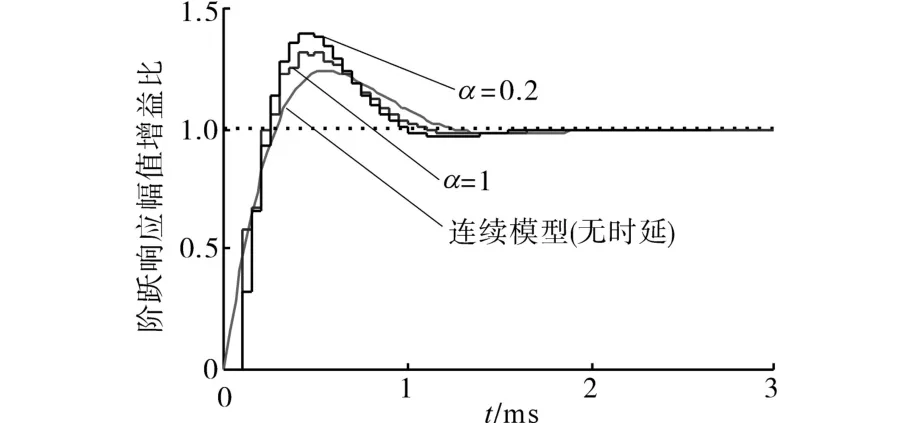
图8 不同补偿参数下阶跃响应对比Fig.8 Comparison of step response under different compensation parameters
上述分析以离散系统的Z变换为基础,控制算法在实际装置中的实现需要先进行逆Z变换,将控制框图转换为输出电压与电流偏差的递推关系式。记表示电流目标值与实际值的偏差,根据图7所示控制框图可知:
当kp=15,ki=50 000,Ts=50×10-6,α=1时,式(10)等价于:

因此,本文所提控制算法的递推关系式为

由此可见,加入了补偿环节后的优化PI控制器递归关系十分简洁,与传统的PI控制器相比并没有增加实现难度,算法实用性较强。
3 仿真与实验结果
为验证本文所提算法的有效性,首先在Matlab/Simulink平台上搭建并网逆变器仿真模型,其中直流母线电压Udc=400 V,滤波电感L=3 mH,开关频率与控制频率设定为20 kHz,PWM调制方式为单极性调制,控制器参数与前文所述保持一致,同时在仿真模型中加入一拍的滞后环节以确保仿真模型与实际控制系统的控制时序完全一致。
首先验证本文所提算法的静态性能,并网电流给定值为幅值20 A,功率因数为1。系统稳定时的电网电压及并网电流波形如图9所示,由图可见算法性能良好,其中并网电流的总谐波含有率THD为2.71%,满足并网逆变器要求。
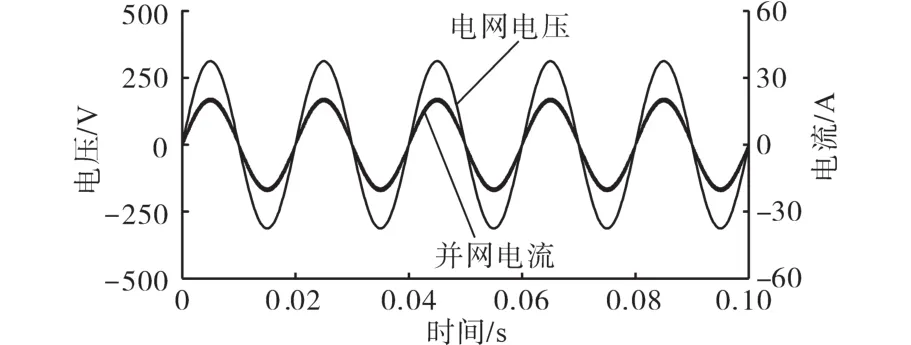
图9 并网逆变器电压、电流仿真波形Fig.9 Voltage and current waveforms of grid-connected inverter in simulation system
为验证本文所提算法的动态性能,首先给定幅值为20 A的并网电流,待系统稳定后将并网电流给定值的幅值改为40 A,仿真波形如图10所示。由图可知,当0.04 s电流给定值发生跳变时,并网电流能迅速跟踪给定值,一到两个周期后就已经完全达到稳定,算法动态性能良好。
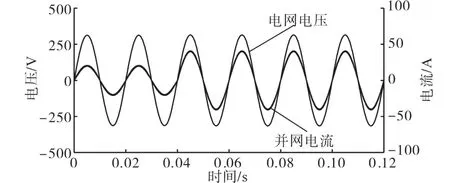
图10 电流给定值跳变时并网逆变器电压、电流仿真波形Fig.10 Voltage and current waveforms of grid-connected inverter in simulation system when current reference stepping
下面通过仿真说明超前环节能有效拓宽PI控制积分系数稳定域这一特点。为此,我们在对逆变器的参数与上述仿真模型保持一致,考察下面一组PI参数:kp=0.6,ki=16 000。如果不加超前环节,由式(6)可以得到当kp=0.9时,ki应不超过11 800才能保持系统稳定,因此这一组控制参数会使系统失稳。下面使用该控制参数进行仿真,将并网电流幅值的给定值设为20 A,仿真波形如图11所示。由图11可见,此时的并网电流已经无法跟踪给定值,系统已失去稳定,且并网电流有明显的发散趋势,这与理论推导相符。
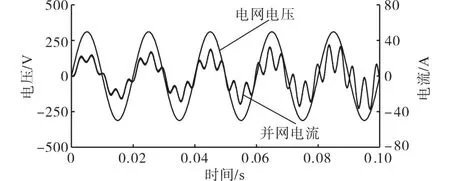
图11 并网逆变器电压、电流失稳波形Fig.11 Voltage and current waveforms of inverter with instable state
仍然选定上述PI参数,但是在控制环路中加入超前环节,根据式(9)的结果,α=1时积分系数的稳定域扩大了一倍,上述参数可保证系统稳定。加入超前环节后的仿真波形与图9所示的基本一致,这里就不再重复展示,其中并网电流的THD为2.68%,与图9的仿真结果基本一致,这说明加入超前环节确实起到拓宽控制参数稳定域的作用。
最后,利用并网逆变器样机验证所提出的基于超前环节的改进PI控制器算法的有效性。逆变器样机为两级式拓扑,前级为升压电路,后级为H桥逆变电路,功率器件选用功率模块SK25GAL063,额定电压电流参数为600 V/25 A,并网电感L=3 mH。
逆变器直流母线电压设定为Udc=375 V,开关频率与控制频率均为20 kHz,受限于实验室系统容量,并网电流给定值的幅值为10 A,控制器参数与本文第2节的描述保持一致。系统达到稳定时的电网电压与并网电流波形如图12所示,样机运行结果表明所提算法可在实际并网逆变器系统中实现并稳定运行。
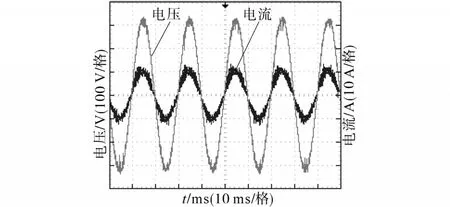
图12 并网逆变器实验波形Fig.12 Experiment waveforms of grid-connected inverter
为验证本文所提算法的动态性能,首先让逆变器的并网电流给定幅值设定为5 A,待系统稳定后把幅值给定值改为10 A,电流给定值跳变时的电网电压与并网电流波形如图13所示,由此可见本文所提算法在实际系统中仍有良好的动态性能。
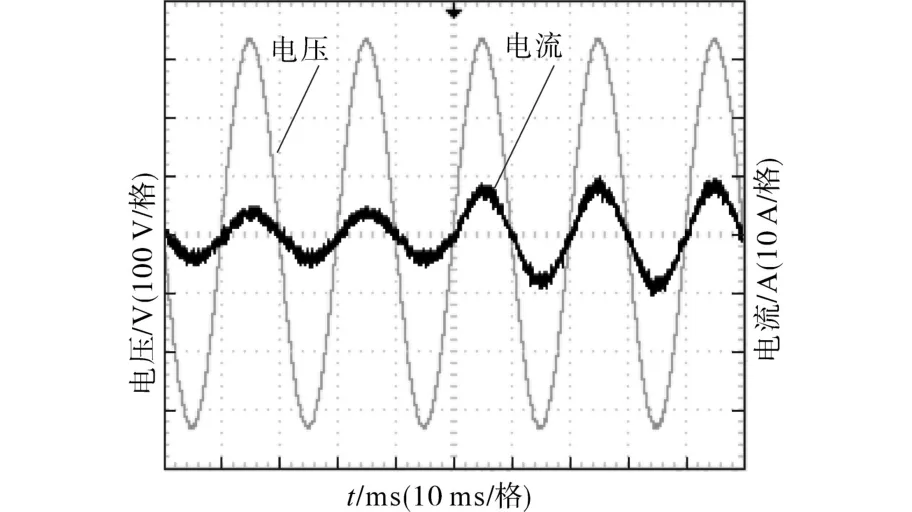
图13 电流给定值跳变时并网逆变器实验波形Fig.13 Experiment waveforms of grid-connected inverter when current reference stepping
4 结论
数字控制器的固有时延特性会使PI控制器参数稳定域缩窄,并改变系统阶跃响应特性。本文提出采用串联超前补偿环节的方式来优化PI控制器,能有效削弱控制时延的影响。优化后的PI控制器与滞后一拍的PI控制器相比具有如下优点:1)积分系数的稳定域比滞后一拍的PI控制器扩大了一倍,提升了系统对电感参数变化的适应能力;2)在保持控制周期不变的情况下能进一步提升控制环路的前向增益,使系统能更好地抑制电网电压扰动带来的影响;3)补偿后的数字控制系统特性与无时延系统的控制性能差异进一步缩小。最后需要指出的是,本文所提出的算法虽然以单相逆变器为例,但对于PI控制器的优化方法在其它具有类似结构的闭环控制系统也适用,具有一定的推广意义。
猜你喜欢
飞控与探测(2022年6期)2022-03-20 02:16:14
力学学报(2020年4期)2020-08-11 02:32:12
电子制作(2019年23期)2019-02-23 13:21:12
测控技术(2018年7期)2018-12-09 08:58:46
测控技术(2018年6期)2018-11-25 09:50:10
黑龙江电力(2017年1期)2017-05-17 04:25:08
光学精密工程(2016年4期)2016-11-07 09:05:39
系统工程与电子技术(2016年7期)2016-08-21 13:59:18
电测与仪表(2016年17期)2016-04-11 12:38:28
电测与仪表(2014年11期)2014-04-04 09:21:20