
基于机载LiDAR数据的DEM获取和精度影响因素分析
——以沈阳摄区为例
2022-01-08 03:06:28于笑雨
城市勘测 2021年6期
于笑雨
(沈阳市勘察测绘研究院有限公司,辽宁 沈阳 110004)
1 引 言
机载激光雷达技术是多学科技术综合,它是激光测距技术、计算机技术、载体动态姿态测量技术和动态GPS差分定位技术迅速发展的集中体现。机载激光雷达系统(LiDAR)是一种集激光、全球定位系统和惯性导航系统三种技术于一身的空间测量系统。该系统是将激光扫描仪、GPS接收机、惯性导航系统、数码相机及控制单元等搭载在飞机上,通过主动向地面发射激光脉冲,接收地面反射回来的反射脉冲并同时记录所用时间,从而计算出激光扫描仪到地面的距离,结合POS系统测得的位置和姿态信息可计算出地面点的三维坐标。
机载激光雷达的点云数据最主要的目的是获取DSM、DEM,文中主要介绍基于沈阳摄区LiDAR点云数据的DEM获取方法和综合精度影响因素分析。
2 项目介绍
沈阳位于辽宁省中部,辽河、浑河、秀水河等途经境内,地形起伏不大,以平地和丘陵地为主,海拔在 25 m~450 m之间。摄区范围为整个沈阳市域,总面积 13 456 km2,绝大部分为平原地形,海拔在 25 m~100 m之间;摄区北部有部分低矮丘陵地,海拔在 150 m~450 m之间,最高点海拔 450 m。
该项目使用通用航空公司的塞斯纳208型飞机作为航空飞行平台,使用RIEGL VQ-1560i激光航摄仪系统(集成飞行管理系统、POS系统)作为本次项目的遥感数据获取设备,设计要求点云密度大于4点/m2(实际上是8点/m2)的激光点云数据和POS数据。高程中误差需满足表1精度要求,制作分辨率为 1 m间隔的DEM成果。
水体和接边处DEM成果质量要求如下:
①水体,静止水域范围内高程值应一致,其高程应取常水位高程。流动水域内的DEM高程应自上而下平缓过渡,并且与周围地形高程之间关系正确、合理。
②接边,相邻数字高程模型数据应接边。接边后数据应连续,无裂缝现象,相邻图幅重叠部分的高程值应一致。
3 点云数据获取
获取满足设计要求的点云数据需要完成以下任务:航摄分区、航高确定、航空LiDAR数据获取技术基本参数表、航空LiDAR航线敷设图、GPS领航数据表、IMU/GPS设计、地面控制测量、精度验证区布设、POS数据处理、点云数据预处理、数据成果检查。
4 DEM数据获取
基于检查合格的点云数据,完成航带裁切、分块、对航带重叠区处理、分类编辑、移动物体删除、架空管线删除、特征线采集、人工编辑、检查点云分类成果,合格后生产DSM,获取DEM。
利用MicroStation及Terrasolid中的TerraScan以及TerraModeler模块,基于DSM成果处理点云数据,包括点云分类、编辑、特征线采集等,获取合格的DEM数据。
DEM获取流程如图1所示:

图1 DEM获取流程
如下阐述DEM获取的关键技术:点云分类和点云编辑。
4.1 点云分类
激光点云分类是从激光点云中提取地表激光点。利用地表激光点构TIN(不规则三角网)模型,检查分类的效果,重点检查坡度较大、单个三角形面积较大的区域(水系除外)以及特殊地物、地貌是否正确。对于异常区域,通过查看激光点云剖面图,对地形不连续、噪声点,以及非地表点(例如植被,房屋,桥梁等)被误分入地表点的情况,加入人工手动分类,改正TIN模型,得到正确的地表激光点。
点云分类应首先滤除噪声点、其次点云宏命令分类、最后手工精分类。
滤除噪声点:地面点分类之前,应将明显低于地面和明显高于地面目标的点或点群分离出来或者删除掉。
宏命令分类:利用TSCAN模块创建宏命令对原始点云数据分类,分类级别为地面点、非地面点二类。设置合适的分类参数,这些参数设置需要较高的经验值,一定要针对不同地形设置不同参数,对一些特定参数的设置需用实验数据检验其适宜性,保证参数设置的准确性,使分类成功率可达88%以上或更高。分类层界面如图2所示。

图2 分类层界面
手工精分类:使用TModel软件对分类后的地面点云数据构建地面模型或生成等高线,检查地面点分类的质量,手工分类修正错误的数据。对高程突变的区域,需要调整参数或分类算法,采用人机交互的方式,使用地表模型编辑工具,借助快速正射影像、等高线和地表模型,认真检查分类数据,将分类错误的点重新分类。修正效果如图3、图4所示。

图3 桥处理前后对比图
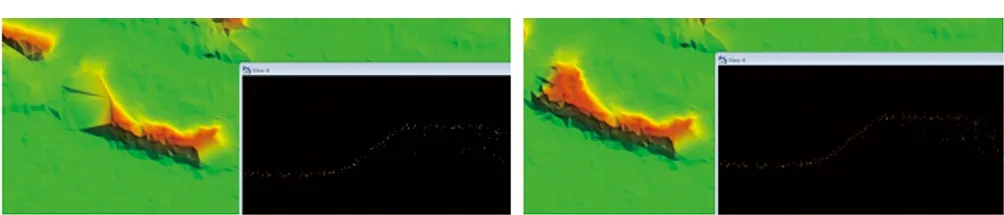
图4 小山包处理前后对比图
手工精分类会占用大量的时间,是LiDAR数据处理的主要工作也是最烦琐的工作,是对一些参数设置经验值要求最高的,点云分类的质量决定了地面模型的质量;完成分类编辑后,仔细自检,获取合格的DEM数据。
4.2 点云编辑
对点云数据中不属于DSM的点实行分离,并通过分类编辑存放在相应的类别中。分类编辑过程应参考生成的DSM模型,重点关注移动物体、架空管线的处理。
编辑方法主要采用调整参数或更换算法,采用编辑宏命令对局部区域分类,如图5所示为分离低点和孤立点。

图5 宏命令界面
5 DEM精度影响因素分析
5.1 检测点位布控及精度统计
航摄获取的点云数据精度是保证DEM数据精度的基础,对点云数据的正确编辑是获取地面点数据精度的保障,编辑是一定要以不能破坏原始数据的精度为工作准则,获取合格的DEM数据。检测点位需覆盖整个摄区,对检测点位需精密布控,共对三种检测方式的野外数据统计了高精度中误差,精度远高于技术设计要求,甚至有些超出预期。
(1)针对沈阳市域康平、法库、新民、辽中、新城子、浑南莫子山、市区7个地区大约 13 km2,选测高程精度检测点,检测点分别选在铺装路面、大地、山坡,山头、人行路、水田坎、房屋台等 1 450个点,中误差为 ±8.4 cm,满足技术要求。高程精度检测点位布控如图6所示。

图6 沈阳市域高程精度检测点位布控图
(2)对区域内一4 km2的铺装路面,采集高程检测点101个,高程精度检测表如表2所示,中误差为 ±3.52 cm,满足技术要求。

区域内一4 km2铺装路面高程精度检测表 表2

续表2
(3)工作区内布设测量高程控制点305个,精度检查点175个,高程精度检测中误差为 ±4.8 cm,满足技术要求。
5.2 DEM精度影响因素分析
影响DEM精度是多因素的,通过实践和研究,综合影响因素有如下方面:
(1)影响精度的主要因素:良好的飞行方案,航高的合理设计,控制点的合理分布,点云密度的超标准完成。
(2)高精度的卫星定位基准站服务系统。
老道和王祥的假玉知识普及讲座乍看之下就像是师徒授艺,旁人看起来也不会起疑。王祥本来想问问自己这批玉器的价值该如何分辨,但是很快就有客人上门,这事也就搁置下来了。
卫星定位基准站服务系统(CORS)中覆盖整个摄区,能够满足本摄区对基站的使用需求,无须重新布设基站。本项目选取摄区内部及周边的15个CORS站,调整采样间隔为 1 Hz,满足联合解算需求。
(3)高精度的POS和IMU系统。
(4)所有点云大地高转换1985高程基准参数精准。
基于POS辅助机载LiDAR技术获取的点云数据,在通过POS与CORS站数据联合解算后,得到的是CGCS2000坐标,高程基准是大地高。根据数据成果坐标要求,需将点云数据高程转换至1985国家高程基准(正常高系统),需通过加密转换点的高程异常改正。具体做法如下:首先将摄区点云成果按照 3 km×3 km的格网间距求取高程异常,作为高程转换参考点;再通过这些均匀分布的高程参考点,将所有点云归算至1985高程基准;本摄区需转换的参考点数约600个左右。
(5)DEM数据精度检测使用的基础系统与基础数据获取一致。
(6)点云数据的准确编辑。
6 展 望
机载激光雷达技术最主要的目的是获取数字高程模型。随着这一技术的进一步发展和完善,随着用户数量的增加,其应用领域将越来越广。特别是随着激光技术的进一步发展,将促进机载激光雷达技术的革新,譬如星载激光对地观测技术。航空遥感领域未来的发展方向是多种传感器的高度集成化与多数据源的融合处理,从而提高数据分类和目标识别的能力。
(1)数据后处理算法将更加成熟
软件的完善和作业经验的成熟度越来越高。
(2)各类数据源的融合发展前景远大
在今后的研究中,若将影像数据、多光谱数据、高光谱数据、GIS数据等数据源和点云数据相互综合融合及应用分析,充分利用各自的优势,将会取得令人满意的效果。
(2)作业和精度评价标准完善
机载激光雷达技术有了蓬勃的发展,相关作业的规范和技术标准日趋完善。
(3)应用领域的拓展
随着机载激光雷达技术的不断成熟,其应用领域将不仅仅局限于测量领域。可以为公路、铁路、水利、环保等部门的设计提供高效的服务;对滑坡等地质灾害实行监测和灾害评估,对紧急灾害事件(如地震、泥石流等灾害)快速响应和评估;此外,将机载激光雷达系统获得的高精度数字高程模型与地理信息系统、网络等技术配合使用,可以为城市规划、不动产、旅游、电力、电信等诸多部门提供服务。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
昆明医科大学学报(2021年6期)2021-07-31 07:40:36
当代陕西(2020年23期)2021-01-07 09:24:44
科学(2020年5期)2020-11-26 08:19:24
小哥白尼(趣味科学)(2019年2期)2019-04-17 02:18:18
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
全球定位系统(2015年4期)2015-02-28 12:38:13
