一种共享型自动颈椎牵引椅的液压控制系统设计
2022-01-06 10:39巩敦卫
实验室研究与探索 2021年11期
任 重, 巩敦卫
(1.长江工程职业技术学院机械与电气学院,武汉430212;2.中国矿业大学信息与电气工程学院,江苏徐州221116)
0 引 言
现代生活节奏加快,颈椎病给亚健康人群带来诸多烦恼。根据最近的一项调查显示,颈椎病是威胁中国办公室人群的前三大健康问题之一。我国颈椎病患病率为3.8%~17.6%,40岁以下的白领、金领人士要占颈椎病发病人数的50%以上。越是职位高的,越是要付出颈椎老损的代价,颈椎病的发病人群正在逐渐年轻化[1]。
颈椎牵引是颈椎病康复治疗的重要方法,对缓解颈部疼痛和改善颈椎功能具有良好效果[2]。根据市场调研,目前市场上手动、电动颈椎牵引椅存在3点不足:①不能根据人的身高、体重来确定最佳的牵引力和牵引时间[3],牵引效果不佳;②不适合公共场合多人同时使用;③不能资源共享。基于此,本文力争开发一款共享型自动颈椎牵引椅,可应用于医院、商场、小区、康复中心等,为伏案工作人群提供私人定制的颈椎牵引体验。
1 共享型自动颈椎牵引椅
在共享经济、绿色发展大环境下,“绿色、安全、创新、健康、共享”的设计理念已是引领产品开发的主旋律。共享型自动颈椎牵引椅的设计。
(1)能根据用户的身高、体重等身体状况自动设定最佳牵引时间和牵引力。
(2)颈椎牵引过程自动化。
(3)能够在住宅小区、商场、医院等户外公共场合多人同时使用。
(4)遇到紧急情况可以立刻停止工作,保证使用人员不受伤害。
根据以上4点,完成共享型自动颈椎牵引椅的外观设计,如图1所示。
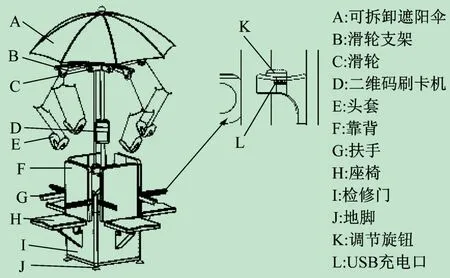
图1 共享型自动颈椎牵引椅的外观设计图
共享型自动颈椎牵引椅一次可以容纳4人同时进行颈椎牵引,顶部太阳伞可以保证户外使用,支撑杆上的扫码仪可以让用户通过扫码选择工位。当用户通过扫码选择某个工位并坐下后,控制系统会自动根据用户的体重和身高计算最佳牵引力和牵引时间,执行机构以最佳牵引力牵引颈椎至最佳牵引时间,完成颈椎牵引全过程的自动化,提高颈椎牵引效果。
2 液压控制系统
颈椎作为生命的重要“交通要道”,集合了人体脊髓神经、血管等。实现自动颈椎牵引控制的系统必须具有运动平稳、惯性小、响应灵敏等特点。液压装置(液压站)工作平稳、冲击小,适合将其作为共享型自动颈椎牵引椅的控制系统[4]。
2.1 液压控制系统的工作原理
按照颈椎牵引过程自动化的要求,液压系统的控制方式应该为闭环控制。当牵引力未达到最佳牵引力时,液压系统应持续工作直至达到最佳牵引力,如图2所示的采用电液伺服阀作为核心控制部件的液压控制系统原理图。

图2 液压控制系统原理图
自动颈椎牵引椅开始工作后,液压活塞杆伸出牵引颈椎,所受的牵引力F由压力传感器检测并转换为电压信号uf,它与最佳牵引力(设定值)转换的电压信号ui经减法器运算后得到两者电压差Δu,伺服放大器将电压差信号放大,并转换为电流信号i输入给电液伺服阀。当牵引力F未达到最佳牵引力Fq时,电液伺服阀阀芯工作在左位,其开口量随电流信号i的大小相应变化,液压泵持续向液压缸供油,直到牵引力达到最佳牵引力才停止工作。液压活塞杆停止到某一个高度持续牵引颈椎。此时,计时器开始倒计时至最佳牵引时间,反向信号控制电液伺服阀阀芯工作到右位,液压活塞杆下降结束牵引。
液压控制系统由伺服放大器、电液伺服阀、液压缸和压力传感器4部分组成,核心控制元件是伺服放大器和电液伺服阀,执行元件是液压活塞杆,反馈元件是压力传感器。
2.2 液压控制系统的数学模型
根据液压控制系统的结构组成得到系统方框图[5],如图3所示。

图3 液压控制系统系统方框图
整个液压控制系统的数学模型可由伺服放大器、电液伺服阀、液压缸和压力传感器4个环节的传递函数来描述[6],如图4所示。

图4 液压伺服控制系统的数学模型
则液压控制系统的闭环传递函数为

式中:Kt为伺服放大器增益;KV为电液伺服阀增益;Kq为电液伺服阀流量增益;Kc为电液伺服阀流量-压力增益;Ap为活塞有效作用面积;ωm为负载固有频率;ωr为液压弹簧与负载弹簧串联偶合的刚度与阻尼系数之比;ω0为液压弹簧与负载弹簧并联偶合的刚度与负载质量形成的固有频率;ζ为阻尼比;ωh为电液伺服阀固有角频率;ξh为电液伺服阀阻尼比;Kf为压力传感器变换系数。
通过查询各组成部分的产品说明书确定传递函数中各参数值,其中:
伺服放大器的放大系数

式中:ΔU为减法器输出的偏差电压,V;I为电液伺服阀输入电流,mA。
电液伺服阀增益

式中:Q为电液伺服阀流量,L·min-1;I为电液伺服阀电流,mA。
电液伺服阀流量增益

式中:ΔQ为电液伺服阀流量差,L·min-1;ΔI为电液伺服阀电流差,mA。
最佳牵引力:通过查询相关医学资料,颈肌较弱者以14~18 kg,颈肌较强壮者18~24 kg,取最佳牵引力为24 kg,Fq取235.2 N。
电液伺服阀压力

式中:Fq为最佳牵引力,N;A为液压缸无杆腔面积,m2。
伺服阀流量压力增益

式中:Q为电液伺服阀流量,L·min-1;P为电液伺服阀压力,MPa。
液压缸活塞有效作用面积:

式中,D为液压缸内腔直径,m。
电液伺服阀固有角频率ωh取377 rad/s;负载弹簧刚度

设液压缸两腔完全封闭,由于液体的压缩性所形成的液压弹簧的刚度为

液压弹簧与负载弹簧并联偶合的刚度与负载质量形成的固有频率

负载固有角频率

液压弹簧与负载弹簧串联偶合的刚度与阻尼系数之比

液压油有效体积模量取β=0.7 GPa;
液压缸活塞阻尼比

电液伺服阀阻尼比

压力传感器最高输出电压

压力传感器变换系数

2.3 液压控制系统的仿真
采用Matlab软件对液压伺服控制系统进行仿真,分析液压控制系统的动态和静态特性[7]。控制策略采用不依赖于精确的数学模型且电液伺服系统中应用十分广泛的PID控制。
2.3.1 仿真建模
将各参数代入液压控制系统各环节[8],通过Simulink建立仿真模型[9],如图5所示。

图5 Simulink仿真模型
2.3.2 系统仿真
采用N-Z整定法对PID控制器的参数进行整定,得到PID调节参数[10],见表1。

表1 PID控制器N-Z整定法调节参数
将PID调节参数输入仿真模型中,得到系统的压力阶跃响应曲线[11],如图6所示。
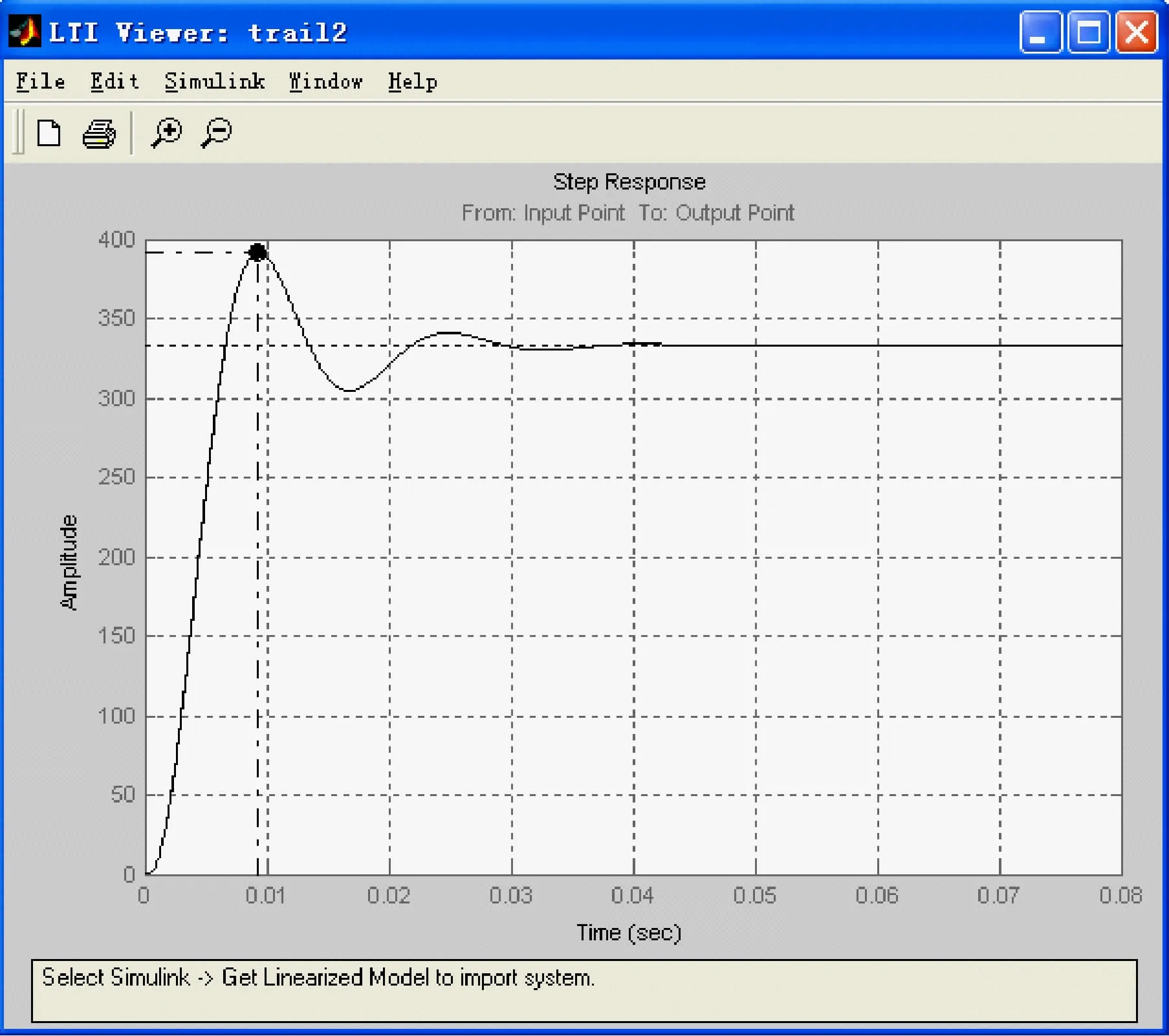
图6 液压控制系统的压力阶跃响应曲线
动态性能分析:输入压力阶跃信号,运行图5的液压控制系统Simulink仿真模型,仿真结果见图6,系统最大超调量为17.5%<20%(工业要求)[12],调节时间仅为2.64 ms[13],系统可迅速达到稳定状态。
系统的Bode图如图7所示。

图7 液压控制系统的Bode图
静态特性分析:控制系统Bode图中上部分为幅频特性图,下部分为相频特性图。系统谐振峰值没有超过图中的零分贝线,说明系统是稳定的[14]。另外,共享型自动颈椎牵引椅的液压控制系统表现为高阶非线性系统特性,由于核心元件电液伺服阀的固有频率远大于负载固有频率。所以,在允许输入的控制信号范围内,不会发生震荡。
2.4 液压控制系统的工作布局
根据共享型自动颈椎牵引椅的工作要求,即要满足同时有4个用户同时使用。液压控制系统布局如图8所示[15]。

图8 液压控制系统布局
液压控制系统(液压站)四周布置牵引工位,中间为太阳伞杆。通过齿轮齿条机构实现一个液压泵为4个工位的颈椎牵引提供动力。
3 结 语
本文从“绿色、安全、创新、健康、共享”的设计理念出发,针对市场已有颈椎牵引椅的不足,开发了一款由液压系统实现颈椎牵引过程的自动化的共享型自动颈椎牵引椅,能够根据用户身体特质自动设定最佳颈椎牵引参数,提高用户的牵引效果,拓展设备的应用范围。系统仿真结果表明,共享型自动颈椎牵引椅液压系统对压力阶跃信号的响应灵敏、超调量小,能满足系统对快速性和稳定性的要求,为我国市场上同类产品的的升级换代提供了技术借鉴。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
化工管理(2021年7期)2021-05-13
哈尔滨铁道科技(2020年3期)2021-01-18
装备制造技术(2020年3期)2020-12-25
重型机械(2020年2期)2020-07-24
再生资源与循环经济(2019年6期)2019-01-21
制造技术与机床(2017年5期)2018-01-19
科技创新与应用(2017年26期)2017-09-12
中学生数理化·高一版(2016年4期)2016-11-19
科技与创新(2016年6期)2016-04-21