
基于专用短程通信的港口车路协同
2022-01-04 13:27林建喜汪忠健
上海船舶运输科学研究所学报 2021年4期
林建喜, 郑 欒, 宗 尧, 汪忠健
(1.厦门远海集装箱码头有限公司, 福建 厦门 361026;2.中远海运科技股份有限公司, 上海 200135;3.中移(上海)信息通信科技有限公司, 上海 201206)
0 引 言
专用短程通信(Dedicated Short Range Communication,DSRC)技术是车联网的重要技术路线之一,基于DSRC的电子不停车收费(Electronic Toll Collection,ETC)是高速公路客运车辆和货运车辆车联网(Vehicle-to-everything,V2X)技术的典型应用。V2X技术横跨汽车、电子、 通信和互联网等多个领域,适用于现代智能交通系统,是5G垂直应用中最具发展前景的实用型技术之一。目前V2X技术有DSRC技术和基于蜂窝网络的车联网(Cellular Vehicle-to-everything,C-V2X)技术两大技术路线。作为DSRC技术的典型应用,ETC在我国高速公路收费领域得到了广泛应用。随着ETC设备的逐渐普及,基于DSRC技术的港口车联网具备了应用基础。
当前DSRC技术的发展仍以被动式技术为主,其典型特征是车载OBU(On Board Unit)的主要部件为电子标签RFID(Radio Frequency Identification),标签中储存有车辆ID(Identification)和车辆类型等多种信息,在RSU(Road Side Unit)覆盖范围内由RSU读取这些车辆信息。该技术目前使用的车辆OBU(车载ETC)无法主动上报车辆位置和车辆运行状态等关键信息,无法满足智能网联和自动驾驶的需求。
本文简要介绍DSRC技术,描述典型的DSRC港口车路协同应用场景,指出DSRC技术应用存在的挑战并提出相应建议,同时展望DSRC技术的发展前景。
1 DSRC技术介绍
DSRC技术是一种适用于智能交通领域的车辆、道路基础设施和交通参与者之间的信息交互的短程通信技术。相关协议标准体系架构包括物理层、数据链路层、网络层、传输层、安全管理层和应用层(见图1)。
1) 在物理层和MAC子层,DSRC使用IEEE 802.11协议提供车载环境下的无线接入。DSRC采用一系列IEEE 1609协议,其中:IEEE 1609.4协议用于实现信道切换;IEEE 1609.3协议用于实现Wave短消息(Wave Short Message,WSM)网络服务;IEEE 1609.2协议用于实现安全服务;IEEE 1609.1协议用于定义资源设备与资源管理设备之间的通信格式和方法。
2) 在网络层,DSRC支持使用IPv6协议;在传输层,DSRC支持使用UDP(User Datagram Protocol)和TCP(Transmission Control Protocol)协议,以满足接入Internet的需求,选择使用WSMP(Wave Short Message Protocol)还是IPv6和UDP/TCP,取决于通信过程中应用程序给定的要求。
3) 在应用层中的消息子层,SAE J2735标准指定固定的消息格式,支持各种基于车辆的应用程序,其中最重要的消息格式是基本安全消息,传达重要的车辆状态信息,支持车车通信(Vehicle to Vehicle, V2V)安全应用程序,SAEJ2945.1标准对通信最低性能的要求有详细的说明。
DSRC技术为满足车联网低时延、高带宽、高可靠性场景的需求,从信道编码、频谱资源、载波技术、信道拥塞避免机制、连接管理和交换方式等多个方面进行设计,本文对此作简要介绍。
1.1 信道编码
在对发送端的原始数据进行调制之前,需通过编码增加冗余信息;接收端对接收到的数据进行解调之后,对冗余信息进行校验,纠正错误,还原数据。通过信道编码器和译码器可提高信道的可靠性,整个流程见图2。
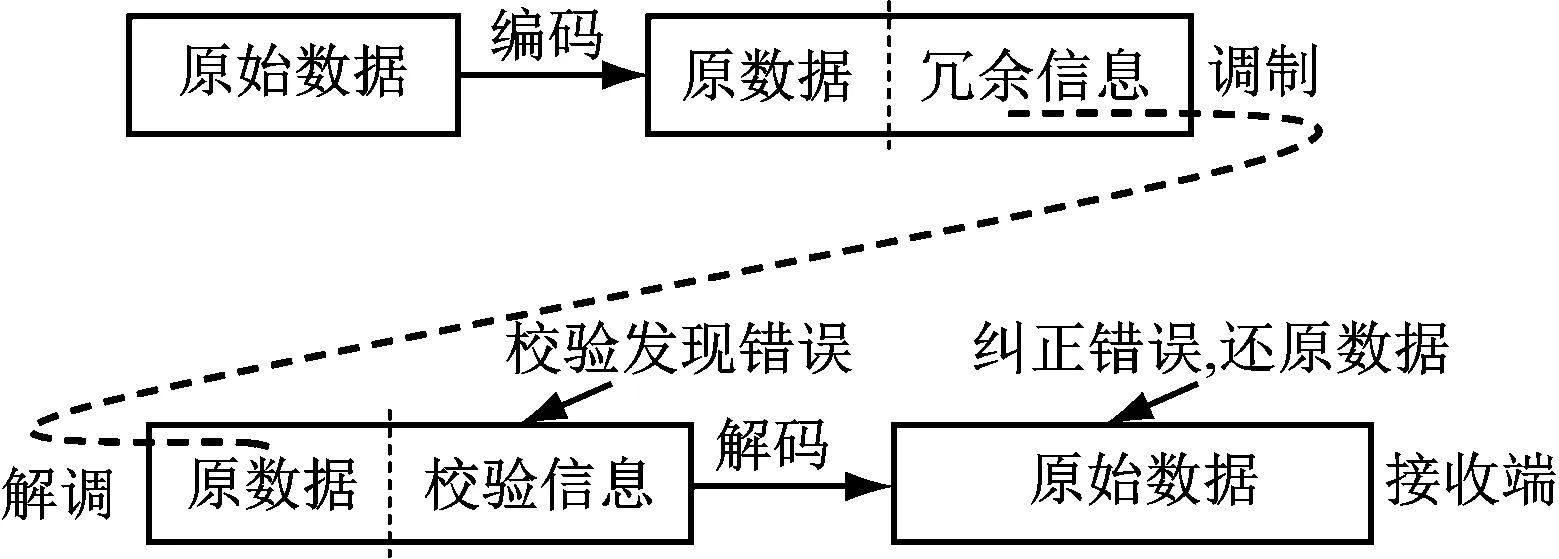
图2 信道编码流程图
DSRC采用卷积码进行信道编码。相较于传统的分组码,卷积码在编码器的复杂性相同的情况下具有更好的性能,更适合串行形式的低时延传输。
1.2 频谱资源
美国联邦通信委员会为基于DSRC技术的智能交通应用分配的频谱资源为5 850~5 925 MHz。75 MHz频段中除了预留5 MHz作为保留频段,剩余的70 MHz频段被分为7个信道,每个信道占用10 MHz频谱资源,具体信道划分见表1。

表1 DSRC频谱分配与信道划分
中央信道CH178是唯一的控制信道,主要负责传输控制类数据包;CH174、CH176、CH180和CH182作为面向车联网应用的服务信道,用于传输服务类数据包。此外,CH172和CH184定义为面向未来车联网应用的特殊安全服务信道,其中:CH172以10~20 Hz频率进行DSRC基础安全信息交互;CH184以更高的优先级传播紧急信息。DSRC技术频谱资源丰富,有利于规模化推广。
1.3 载波技术
DSRC技术采用正交频分复用(Orthogonal Frequency Division Multiplexing,OFDM)技术进行信号调制,采用该技术产生的子载波之间是相互正交的(见图3)。
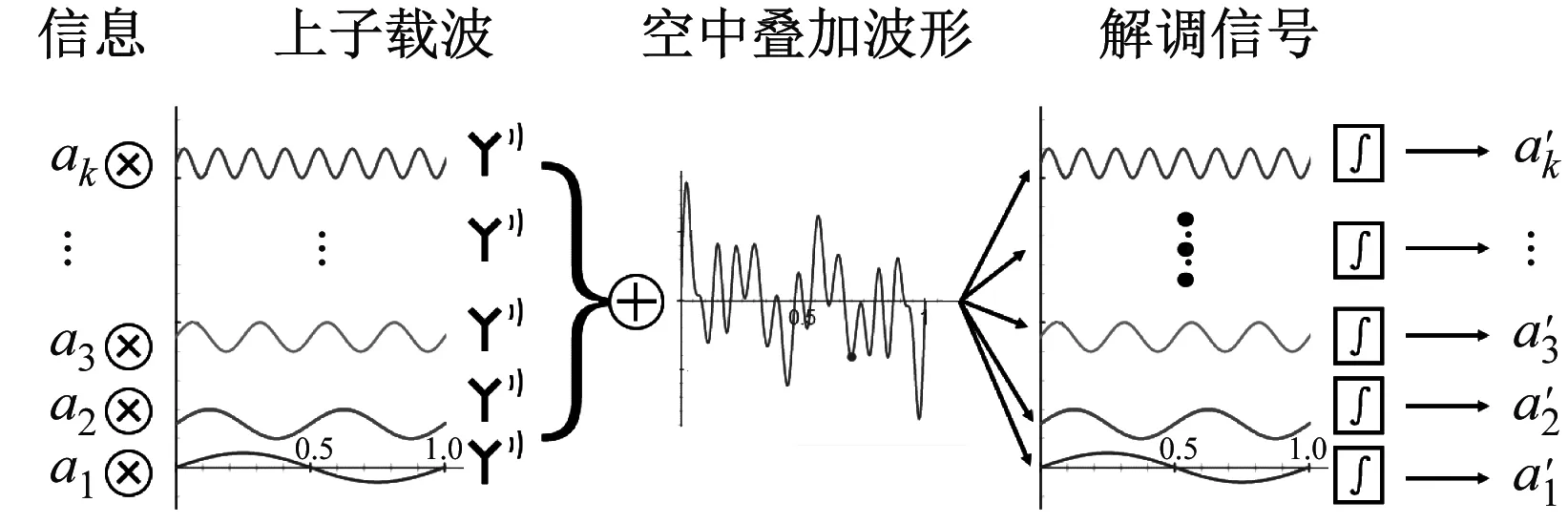
图3 OFDM技术示意
不同于普通单载波技术,OFDM技术将高速串行数据流转化为低速并行数据流,降低了信号传输过程中的多径反射干扰。不同于其他多载波传输技术,OFDM技术节约了带宽,传输的低速码流增强了系统对抗多径时延的能力。
1.4 信道拥塞避免机制
由于DSRC采用的是无连接方式,在发送数据时需探测接收端是否空闲,因此DSRC技术采用CDMA/CA方式避免系统拥塞,主要流程如下:
1) 检测信道是否已被使用,若检测出信道空闲,则随机等待一段时间之后发送数据;
2) 若接收端收到此帧,则经过一段时间之后向发送端发送确认帧ACK;
3) 发送端收到ACK帧,确定数据已正确传输,经历一段时间之后再发送数据。
1.5 连接管理和交换方式
由于实时环境下建立和拆除车路协同通信连接的开销非常大,因此DSRC采用无连接的方式,即通信网络仅负责将报文分组发送给接收方,检错与流控由发送方和接收方处理。DSRC协议为用户提供OBU与RSU之间的广播群组交换方式,即不确定性无连接方式;同时,支持RSU与OBU进行点对点通信,即确定性无连接方式。
2 DSRC典型应用场景介绍
目前DSRC技术在我国最典型的应用是ETC,我国已于2018年全面实施高速公路ETC改造。整个ETC系统由车载OBU、路侧RSU、后台计费系统和辅助放行设施组成,我国的ETC系统使用的车载OBU主要为基于被动式DSRC的RFID。ETC系统示意见图4。
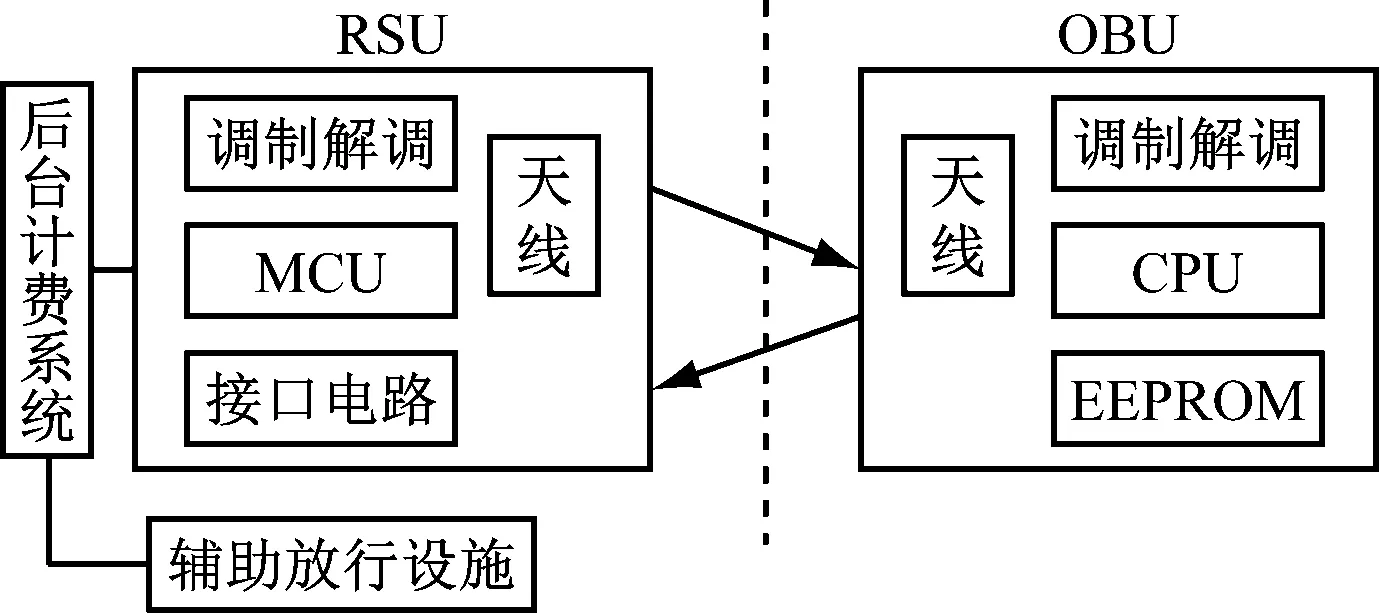
图4 ETC系统示意
ETC应用通信建立的流程如下:
1) 当ETC通道有车辆经过时,地感线圈会作相应检测,并将车辆到达信息报告给RSU;
2) RSU向车载RFID发出握手信号,RFID反馈信号完成握手,创建双向信道;
3) RSU读取OBU中的车辆识别信息,并将其传送给中心系统数据库进行车辆匹配,从而判断车辆所属情况及实施扣费。
截至2020年12月,我国道路车辆的ETC普及率达到了90%以上,高速公路收费的电子化发展有助于缩小收费站的规模,节约基建和管理费用,降低收费管理成本,提升车辆营运效益,提高车辆通行效率。
3 基于DSRC的港口车路协同
下面基于已有的DSRC技术应用成果和标准研究,分析基于DSRC技术的港口车路协同应用的技术架构和应用场景。
3.1 DSRC港口车路协同系统架构
DSRC港口车路协同系统架构包含物理层(L1)、数据链路层(L2)和应用层(L7)等3层(见图5)。
1) 物理层用于实现无线通信信号的发送和接收;
2) 数据链路层包含MAC子层和LLC子层,其中,MAC子层用于实现RSU对OBU的识别和访问控制,LLC子层用于实现协议数据单元PDU的传送和接收、差错控制及差错恢复等;
3) 应用层包含B-KE、I-KE和T-KE实体,其中,B-KE用于实现公共信息广播,I-KE用于实现RSU与OBU的通信初始化,T-KE用于实现RSU与OBU之间的数据交换。
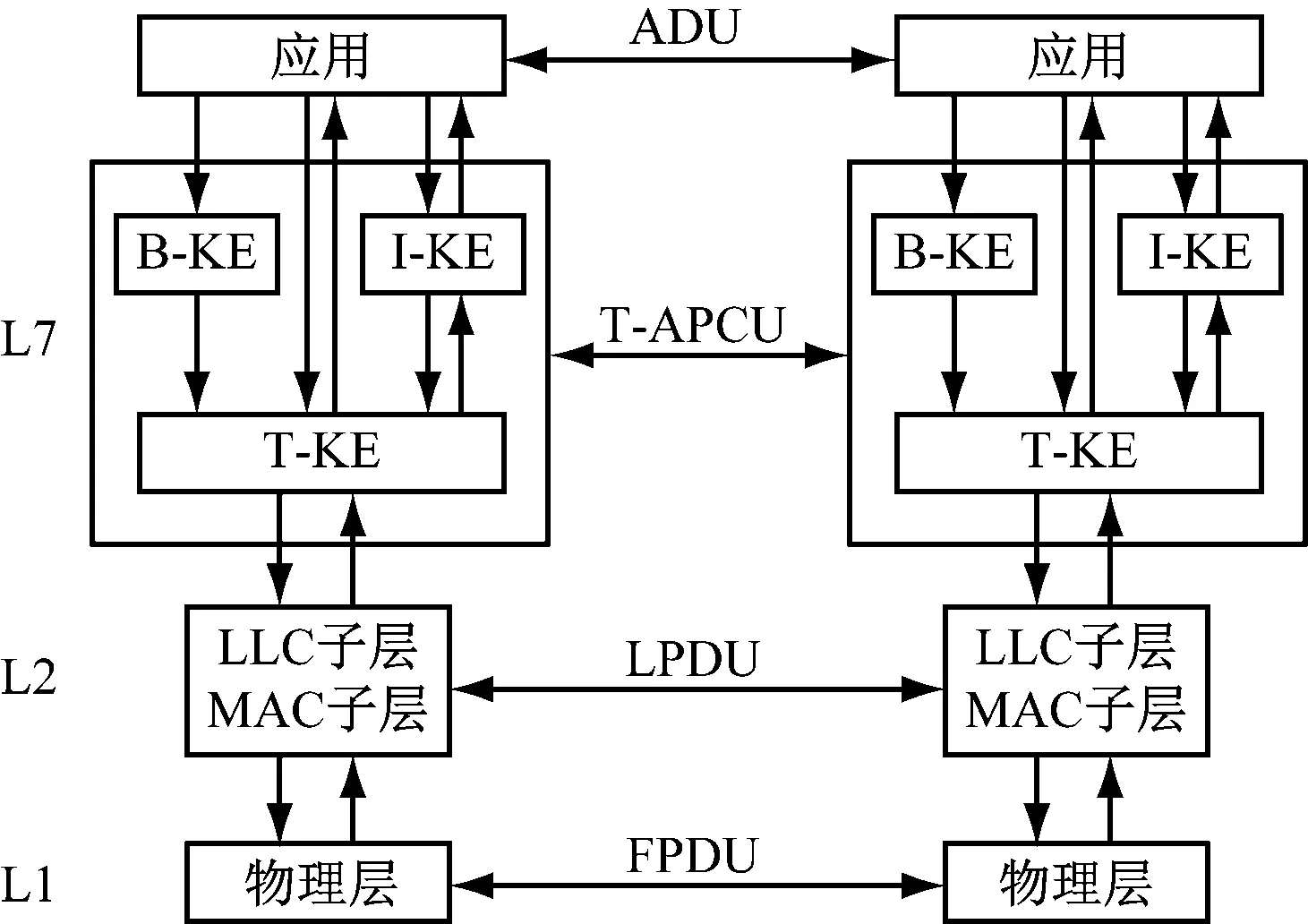
图5 DSRC车路协同架构示意
3.2 DSRC港口车路协同应用场景
3.2.1 港口无感过闸
准备入港提货的集卡车主可通过手机APP登录智慧港口管理平台,预约获取电子提货单;车辆进入港口时,基于5.8G微波通信技术,在距离闸口10 m以内、车速为20 km/h的状态下仅用数百秒就完成与平台的车辆信息交换,完成无感入闸;车辆出港口时,OBU通过RSU与平台信息交互,根据更新之后的电子提货单进行货物出港验证;车辆到达收货位置卸货之后进行签收。港口无感过闸应用的车端数据交互需求见表2。经测算,相比传统的有源射频卡,车辆无感过闸出入港的时间平均缩短50%。
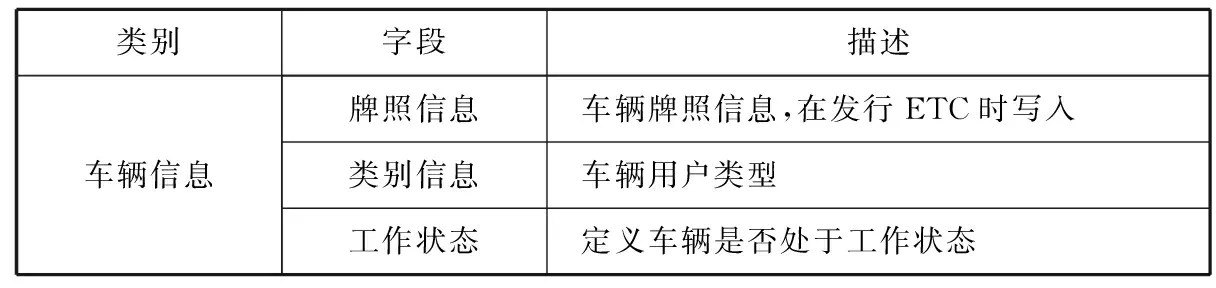
表2 港口无感过闸应用的车端数据交互需求
3.2.2 港口快速过磅
车辆经过地磅时,利用OBU与RSU通信,与平台完成车辆信息和压力传感信息的匹配,记录空载车辆的重量;车辆出货场时,经过地磅进行货物称重,并利用OBU和RSU与平台进行信息交互,记录载货车辆的重量。港口快速过磅应用的车端数据交互需求见表3。经测算,相比传统的人工录入信息,车辆快速过磅的时间平均缩短30%。

表3 港口快速过磅应用的车端数据交互需求
3.2.3 港口车辆导航
在港口内行驶的提货集卡车辆,通过车载OBU与RSU通信,完成与平台导航信息的交互,获取所要到达货场的引导路线,车辆根据引导路线到达堆场进行装货;同时,实现对集港、疏港车辆的动态管控和货仓之间运力的调配。港口车辆导航应用的路端数据交互需求见表4;港口车辆导航应用的车端数据交互需求见表5。经测算,相比传统人工调度模式,车辆引导时间平均缩短20%。

表4 港口车辆导航应用的路端数据交互需求

表5 港口车辆导航应用的车端数据交互需求
3.2.4 港口综合交通信息服务
港口交通事件多发路段部署的路侧拓展传感器通过RSU将感知到的异常路况和交通事件信息播发给车载OBU,实现对港口集卡驾驶员的交通信息服务。港口综合交通信息服务类型见表6。经评估,引入该系统之后,重大安全事故发生率下降了15%,港口车辆总体通行效率得到了提升。

表6 港口综合交通信息服务类型
3.3 DSRC技术对港口集卡无人驾驶的支持性
港口集卡无人驾驶也是智慧港口的典型应用之一,评价DSRC技术对无人驾驶的支持性的主要通信性能指标包括时延和丢包率。鉴于DSRC网络架构是基于分层式结构设计的,每层提供不同的功能,且是自上而下调用的,每层时延不尽相同;丢包率受到数据包发送速率、网络负载、通信环境、通信距离、相对车速和障碍系数等多种因素的影响。
上汽集团针对车路协同应用场景下的DSRC技术的性能进行了道路测试,包括V2V测试和车辆与路侧基础设施通信(Vehicle to Instruction,V2I)测试。
3.3.1 V2V测试
V2V测试将OBU分别搭载在2辆车上,通过引入“动态系数”这一概念对车辆相对运动速率、车辆距离变化状况和障碍物类型等3个方面的因素进行表征,研究动态系数与时延和丢包率之间的关系。动态系数的定义见表7。
V2V测试发现:在400 m范围内,当动态系数较小时,时延稳定在5.0 ms左右,且不随距离的增大而明显增加;当动态系数和距离都较大时,时延最大值为7.2 ms。上述结果表明,对于V2V通信,距离过远且障碍物阻隔影响较大是造成DSRC通信时延显著增加的主要原因。V2V通信的丢包率对车辆距离比较敏感,在距离为100 m的情况下:当动态系数从0变化到0.8时,丢包率几乎没有变化,均在 0.5%左右波动;当动态系数达到1.0时,丢包率显著增长到4.8%。这表明,相对于运动状态的影响,丢包率受障碍物阻碍的影响更明显。
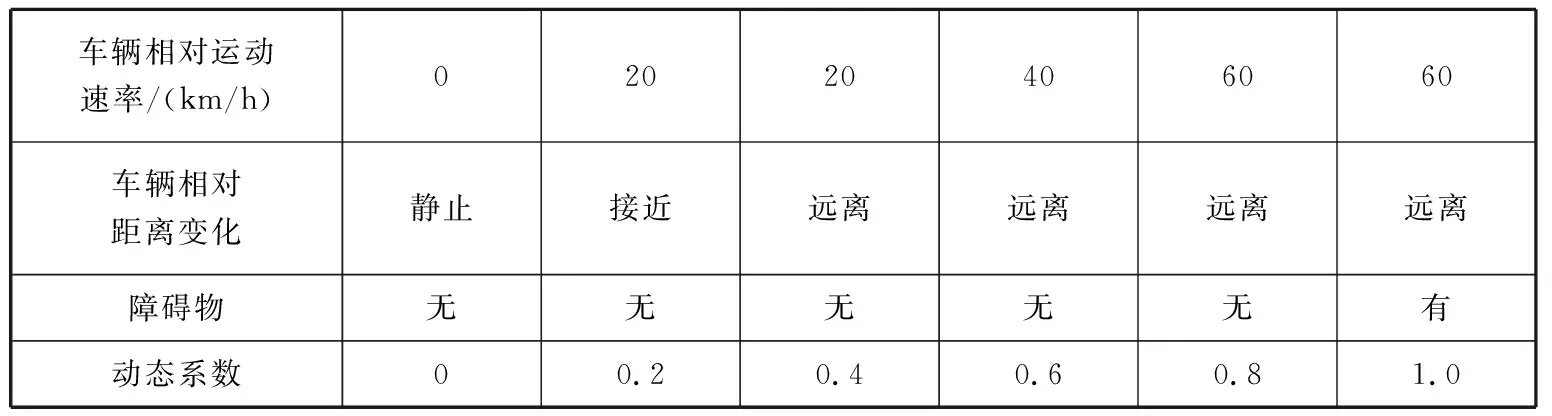
表7 动态系数的定义
对于港口无人驾驶系统而言,港口无人驾驶车辆的V2V通信一般在两车的距离较近、无障碍物的情况下发生,例如跟车行驶、排队候车和转角会车场景,一般不会遇到跨集装箱、桥吊等大型障碍物进行V2V通信的情况,因此400 m范围内的DSRC通信时延为5 ms左右、丢包率为0.4%这类测试指标能满足港口无人驾驶作业V2V通信的需求。
3.3.2 V2I测试
V2I测试给出了基于DSRC技术的OBU与RSU通信的效果。V2I测得的时延总体上更大,达到5.0~6.5 ms;时延在动态系数小的情况下受通信距离的影响比较明显;时延随着障碍物的出现显著增加。V2I通信的丢包率受距离因素的影响更显著。测试结果表明:在距离相同的情况下,不同动态系数对应的丢包率相近;在有障碍物阻碍的情况下,距离较近时丢包率受障碍物的影响较小,距离较远时障碍物的存在导致丢包率显著提高。总而言之,当OBU与RSU之间的距离较小时,V2I通信的时延和丢包率表现更好,随着障碍物的出现,时延会显著增加,当有障碍物出现且距离较大时,丢包率显著提高。
对于港口无人驾驶系统而言,港口无人驾驶车辆的V2I通信一般将路侧拓展传感器的感知结果传输给无人驾驶车辆,或将无人驾驶车辆的部分状态信息传输给V2X平台,通信范围较大,通信距离较远,且可能存在障碍物,DSRC技术展现的时延和丢包率通信性能可能无法完美支持港口无人集卡的V2I通信。
综上所述,DSRC技术能有效支持港口无人驾驶系统V2V通信,但受通信距离和障碍物的影响,可能无法完美支持V2I通信。
4 挑战与建议
由于部分通信性能暂时无法满足特定应用场景的需求,DSRC技术的应用面临着一系列挑战,下面对此进行分析并提出应对建议。
1) 考虑主动式DSRC,通信距离较长,可实现全双工通信。
ETC系统的车载OBU采用被动式DSRC,即RFID,OBU通过RSU传输的能量上报车辆身份信息,这种工作模式导致ETC系统的实际有效范围仅为5~10 m,单个系统通信覆盖的范围较小,难以实现长距离连续覆盖,因此目前基于被动式DSRC的车路协同系统仅应用于事故多发地等关键点位。
OBU与RSU的交互方式还有主动式,即OBU可向RSU发送功率较大的信号,通信距离较长,且可实现全双工通信。2种交互方式对比见表8。

表8 2种交互方式对比
2) DSRC可采用新的信道划分机制,降低信道拥塞概率。
信道拥塞问题能通过将信道容量提升到20 MHz来解决。通过将传统的CH174信道与CH176信道合并为CH175,将传统的CH180与 CH182信道合并为CH181。有研究指出,20 MHz信道能有效降低碰撞概率,合并后的DSRC信道见表9。同时,通过20 MHz传输调制和编码方式帧的花销会翻倍,且会在给定频谱下产生更多噪声。

表9 合并后的DSRC信道
3) DSRC数据交互速率较低,需采用全新的消息编码。
由于DSRC技术本身数据交互的速率较低,若采用全新的消息编码,争取使用最少的字节传递尽量多的信息,可满足消息类车路协同应用的需求。但是,车路协同信息量巨大,视频类数据和地图类数据等大容量数据的传输需求仍难以满足,因此 DSRC技术仍可能无法应用于超视距感知和车用地图下载等高等级自动驾驶场景中。
4) 考虑消息集与5G-V2X消息集的兼容性,设计全新的交互标准。
DSRC应用层消息需考虑兼容C-V2X应用层消息集(LTE-V2X、LTE-eV2X、5G NR-V2X消息集和未来增强5G新空口V2X消息集)。
5) ETC的普及率高,设备厂商缺乏车路协同应用推广动力。
目前ETC设备在我国已得到广泛应用,这是基于DSRC进行车路协同应用的优势,但也会极大地制约ETC设备厂商推广DSRC车路协同技术的积极性。ETC设备厂商作为DSRC技术的应用者,需更加深入地考虑如何在车路协同应用场景中创造更多产品价值。
6) DSRC技术存在专利壁垒,难获国家政策推动。
DSRC技术专利主要由欧美发达国家掌握,随着我国ETC产业的发展,国内企业逐步在标准、专利等领域拥有了更多话语权,但在与C-V2X技术这种由我国通信企业主导的技术竞争中,DSRC技术更难符合技术安全性的要求,因此DSRC技术可能难以获得国家政策的推动。
5 结 语
本文主要参考IEEE DSRC相关标准和SAE DSRC相关标准对DSRC技术进行简要分析,介绍国内DSRC技术的成熟应用(即ETC),总结被动式DSRC技术在港口的应用;通过参考国内最新DSRC技术标准,对面向辅助驾驶/高等级自动驾驶的DSRC技术进行分析;通过与C-V2X相关标准相对比,指出DSRC技术面临的挑战并提出应对建议。
未来,DSRC技术标准将得到持续演进,DSRC技术的应用场景将逐步丰富。DSRC技术的演进需满足面向自动驾驶的车联网通信连接可靠性高于99.999%、连接时延为毫秒级、连接容量支持大规模自动驾驶应用的车路协同应用需求;同时,DSRC技术需构建贯穿云、管、端的三级车联网安全体系,实现安全可靠的车联网。面对丰富多样的应用场景,DSRC技术需考虑与5G网络、全球卫星导航系统、物联网、边缘计算、云计算、大数据和人工智能等技术结合,特别是考虑与C-V2X技术结合,实现与C-V2X系统的融合发展。
猜你喜欢
杭州电子科技大学学报(自然科学版)(2022年4期)2022-08-23
电脑知识与技术(2021年22期)2021-09-14
电脑知识与技术(2021年22期)2021-09-14
现代信息科技(2021年21期)2021-05-07
花火B(2019年3期)2019-04-27
软件导刊(2018年1期)2018-02-01
中国新通信(2017年12期)2017-07-16
CHIP新电脑(2016年3期)2016-03-10
