
利用指针式电流表搭建瓦特秤
2021-12-30 08:02:52刘天奇崔芳鸣冯一辰
物理实验 2021年12期
刘天奇,崔芳鸣,冯一辰
(北京师范大学 物理学系,北京 100875)
利用电流表测量微小质量的实验已经有报道[1],但该实验需要对装置进行定标,其测量分辨率由于受制于定标物的精度,而无法达到较高的水平,且不能充分发挥电学量测量精度高的优势. 上世纪七十年代英国物理学家基布尔为了定义国际标准电流单位——安培,发明了基布尔秤[2]. 随着量子霍尔效应以及约瑟夫森结现象的发现,基布尔秤将经典力学的现象与量子力学联系起来,通过实验设计,基布尔秤成为可以高精度测量普朗克常量的装置,后来由此提出了用基本常量定义国际标准质量单位——千克. 因此基布尔秤在计量学上具有十分重要的地位.由于基布尔秤的基本原理公式左右两端均为功率的量纲,因此基布尔秤又被称为瓦特秤. 它的2种工作模式中,涉及2个物理过程:通有电流的线圈在磁场中受力;该线圈在磁场中运动切割磁感线产生感应电动势. 从基本原理出发,有很多方法可以制造简易的瓦特秤.
制造瓦特秤需要产生合适的磁场,并找到符合需求的线圈. 对此可以从基本零件开始构建瓦特秤[3],也可以考虑改装存在类似结构的电子元器件[4],如扬声器. 实验室中常见的指针式电流表具有上述的结构:有良好的磁场,且有通过电流后会在磁场中受到安培力的线圈;如果人为地拨动指针,电流表内的线圈便会切割磁感线产生感应电动势. 基于此,本文利用大学物理实验中常用的万用表、稳压电源等,通过改装指针式电流表制成了简易的实验装置,验证了瓦特秤的工作原理,同时由于电学量的测量分辨本领大于力的测量,因此基于瓦特秤原理设计的装置在测量微小力方面具有优势.
1 实验原理
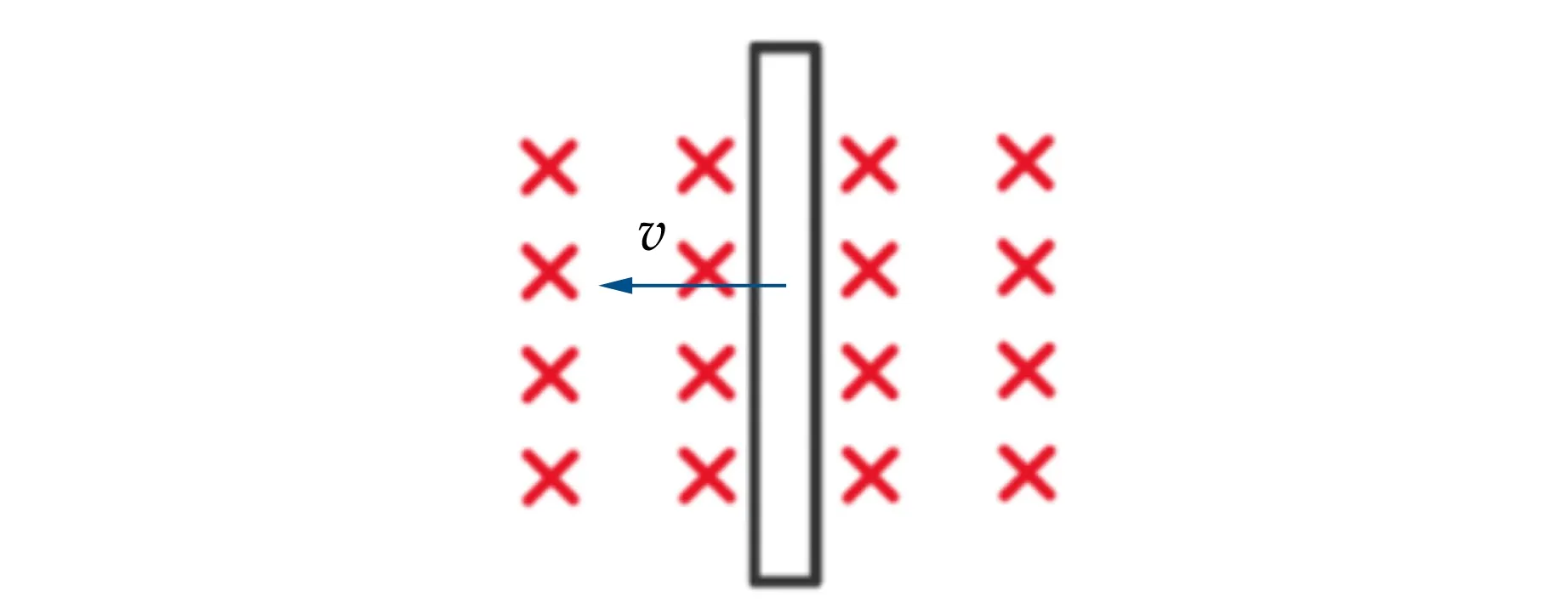
实验分为2个过程:首先,金属导体在磁场中运动产生感应电动势ε[图1(a)],其次金属导体在同一磁场中静止并通过恒定电流I[图1(b)].
取该金属导体的一段微元,长度为dl,发生2次过程所处位置相同,且磁感应强度为B,第1个过程中导体微元运动速度的垂直导体分量为v(平行于导体的速度分量在此过程不起作用),第2个过程中导体中自由电子平均迁移速度为u,受到的安培力为dF.同时设该段导体单位长度内自由电子电荷量为ρ.则带电粒子在电磁场中的受力(洛伦兹力公式)[5]为
dF·v=ρdlu×B·v=
ρdlu·(B×v)=j·(B×v)dl,
(1)
同时,根据电动势的定义:非静电力对单位电荷所做的功,在这里非静电力即为洛伦兹力沿导体方向的分力,所以
ρdlv×B·dl=-ρdl·dU,
(2)
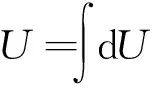
(a)在磁场中运动的金属导体
(b)静止在磁场中的通电导体图1 实验过程
将式(2)代入式(1),计算得到
dF·v=jdU.
(3)
式(3)的成立需要满足以下条件:导体在静止受安培力及运动产生感应电动势这2种状态时,其他条件(如磁场分布等)保持不变;导体运动和受力均在磁场中的同一位置且导体本身不影响磁场(默认此处的导体为非铁磁材料).只有满足了上述条件,才能保证磁场强度相等.从对一段导体元的微分式引申到整个导体,如果这2个过程发生在同1个导体上,且导体在磁场中的相对姿态保持不变,那么磁场在导体处的分布则可认为保持不变,积分可得满足整个导体的表达式:
Fv=UI.
(4)
等式左边的受力与等式右边的电流I在相同状态下得到,左边的速度v与右边的导体两端测得的电压U是在另一状态下得到的,此处的UI一般理解为虚功率,并不具有实际物理意义.(4)式两边均为功率量纲,本文的装置也是基于此原理设计并完成对力的测量,只要测得某受外力的非铁磁性通电导体在静磁场中相对磁场保持静止时通过的电流、在磁场中的静止位置附近运动时的导体速度和两端电压,就可求出导体受力.通过瓦特秤这一原理便可以将微小力的测量转化为电学量和位移的测量,从而制成微力传感器.
F,v,U,I这4个物理量通过这2个过程联系起来得到式(4),因此当测得v,U,I后就可以计算出力F.与传统的测力方法相比,免去了繁琐而且容易引入误差的定标步骤,避免了由于定标物本身精度不高导致的问题[2].
2 实验装置
实验装置采用指针式毫安表,从内部结构可知,当电表不通过电流时,指针转动也会切割磁铁的磁感线产生感应电压.同时,由于除磁铁外没有铁磁性物质,指针转动过程不影响表内部的磁场.因此可以通过测量指针某点处的运动速度以及相应的电压定出比例系数,在同一点处受力时,通过调整输入的电流使得指针回到初始位置,根据电流大小测量出受力大小.对于这个装置来说,电流表指针连接的线圈在磁场中的运动以角速度转动,因此式(4)可改为
Fv=FLω=Gω=UI,
(5)
其中,L为电流表指针的受力点到旋转轴的垂直距离,G为指针式电表指针受到的力矩.
在进行称量实验时,实验装置的构型图和实物图如图2所示.
光路调整后,激光器发出的光经过凸透镜刚好聚焦到指针式电表的指针上,使得指针挡住大部分激光;然后在光路后放置带有标示线的光屏,通过调整凸透镜以及激光器的高低,使得指针在平衡位置时,激光经过指针后发生的直边衍射条纹中的某特定级次刚好与光屏上的标示线重合. 由于采用衍射的方法进行了光学放大,对指针是否位于平衡位置的判断十分灵敏,整个装置都必须放置在封闭的空间内以避免空气流动对判断指针是否回零产生干扰. 基于这套装置,就可以通过测量指针在平衡位置附近运动时,某点末端的速度以及相应的感应电压,将这个过程称为动态法;再在指针末端测速点受力时,通过调整输入电流使得指针在光屏上显示回零,将此个过程称为静态法,并读出当前电流. 根据以上3个物理量就可以反推出当前指针的受力.

(a)构型图

(b)实物图图2 称量装置图
动态法实验装置的构型图和实物图如图3所示.
本文设计的装置与基布尔秤的不同之处在于:传统的基布尔秤装置是通过线圈在磁场中平移切割磁感线产生感应电动势,进而得到电压与速度之间的关系,这样设计的装置比较复杂,线圈的运动状态也不容易精确控制. 而指针式电表内部所设计的磁场与线圈的位置刚好使得磁场与线圈转动产生的速度垂直,因此线圈的速度完全用来切割磁感线,不必再进一步求解速度垂直磁场的分量.
(a)构型图
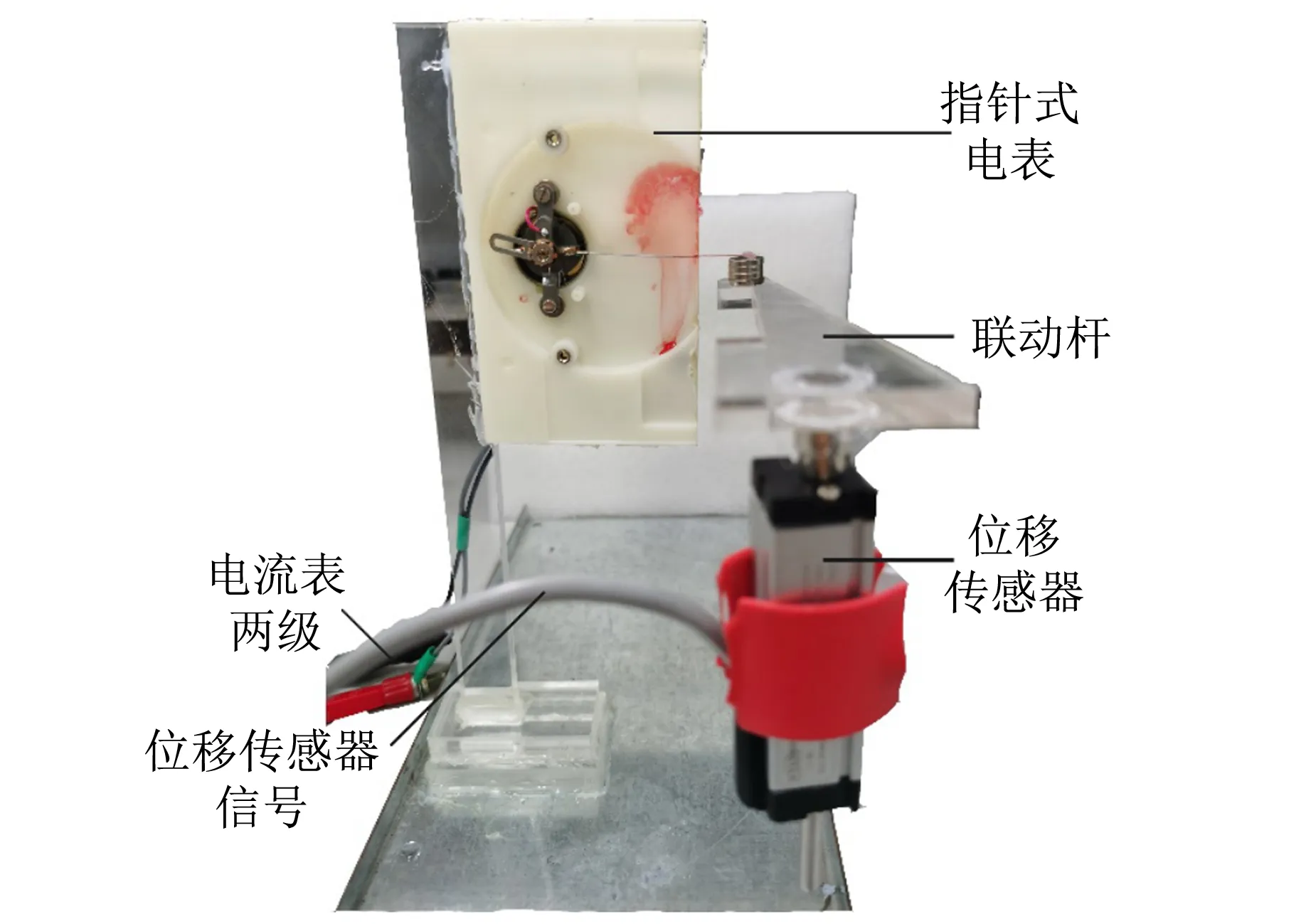
(b)实物图图3 动态法实验装置
3 实验结果
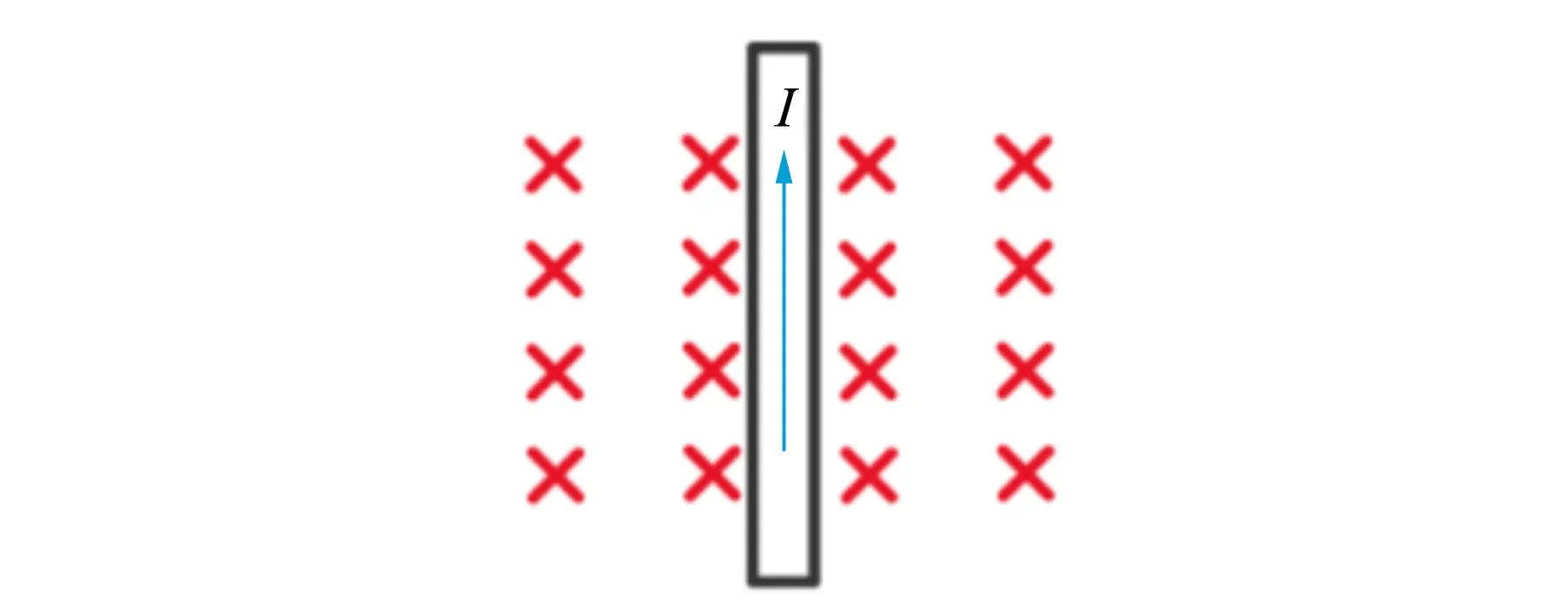
在动态法测量中,位移传感器连接示波器,实时输出指针末端标记点的相对位移数据,并利用差分法平滑化后求得指针的速度,同时示波器的另一通道测量指针式电表两端的感应电压,将多组相同时刻的2路信号数据点放在同一张图中,进行线性拟合,结果如图4所示.

图4 动态法感应电压与指针速度的关系
由式(4)可知,电压与运动速度呈正比关系,而此处的斜率为负的原因是测量感应电压的正负极与速度规定的正方向相反. 但不难看出,整体符合线性趋势,而且截距较小可忽略不计.
有了动态法的斜率数据,可利用静态法测指针末端标记点的受力. 本文测量了多种微小力.
首先是液体的蒸发曲线,将蘸有少许水的细线挂在指针的末端标记点处,通过测量并记录不同时间的指针受力以绘制出水的蒸发曲线,如图5所示.
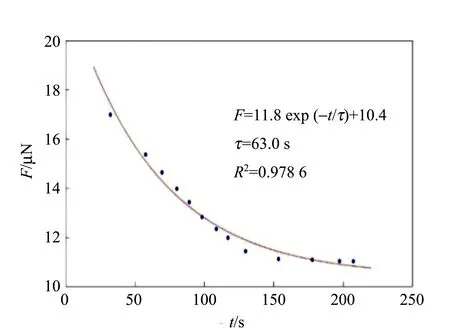
图5 指针上挂蘸水细线时指针受力随时间变化
通常液体的蒸发曲线应呈指数衰减形式,由于整个系统的边界条件复杂,而且还存在空气湿度等因素的影响,图5中曲线基本符合指数规律.
将指针放置在多种力场中进行实验,首先在2个相对放置的超声波换能器之间形成超声驻波;然后将指针末端标记点置于超声波换能器的中线处,将换能器加载正弦波信号;最后同时移动上下2个超声波换能器从而改变与指针的相对位置,测量出空气中驻波的声压分布. 由于指针不存在反馈调节,因此只在波节附近的半个周期可以稳定存在数据,连续测量了6个不同位置波节附近的数据,其中1个波节处的数据如图6所示.
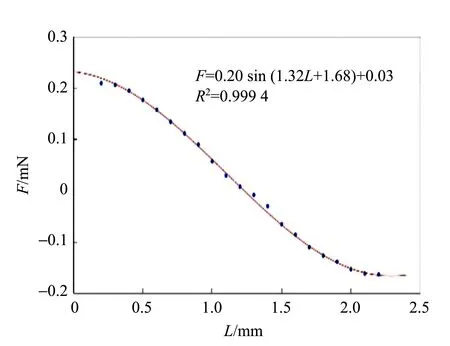
图6 空气中驻波的声压分布
测得的声压力分布符合预期的三角函数形式,根据三角函数的空间频率多次测量取平均值反推出声波的驻波波长为4.66 mm. 而根据信号发生器显示的数据以及空气中的声速数据计算得到驻波的波长为4.32 mm,相对偏差为2.6%,由此验印证这种方法的可行性.
最后,将金属指针与一极板之间加载kV级别的电压,由于电荷在电场的作用下重新分布,指针与极板之间会产生吸引力,这个力十分微弱,充分考验了该方法测量微小力的能力. 由简单的量纲分析可知,吸引力的大小与金属指针和极板间电压的平方成正比,同时指针与极板间距越小,吸引力越大. 控制极板间距在不同恒定数值的情况下,受力与电压的关系如图7所示.
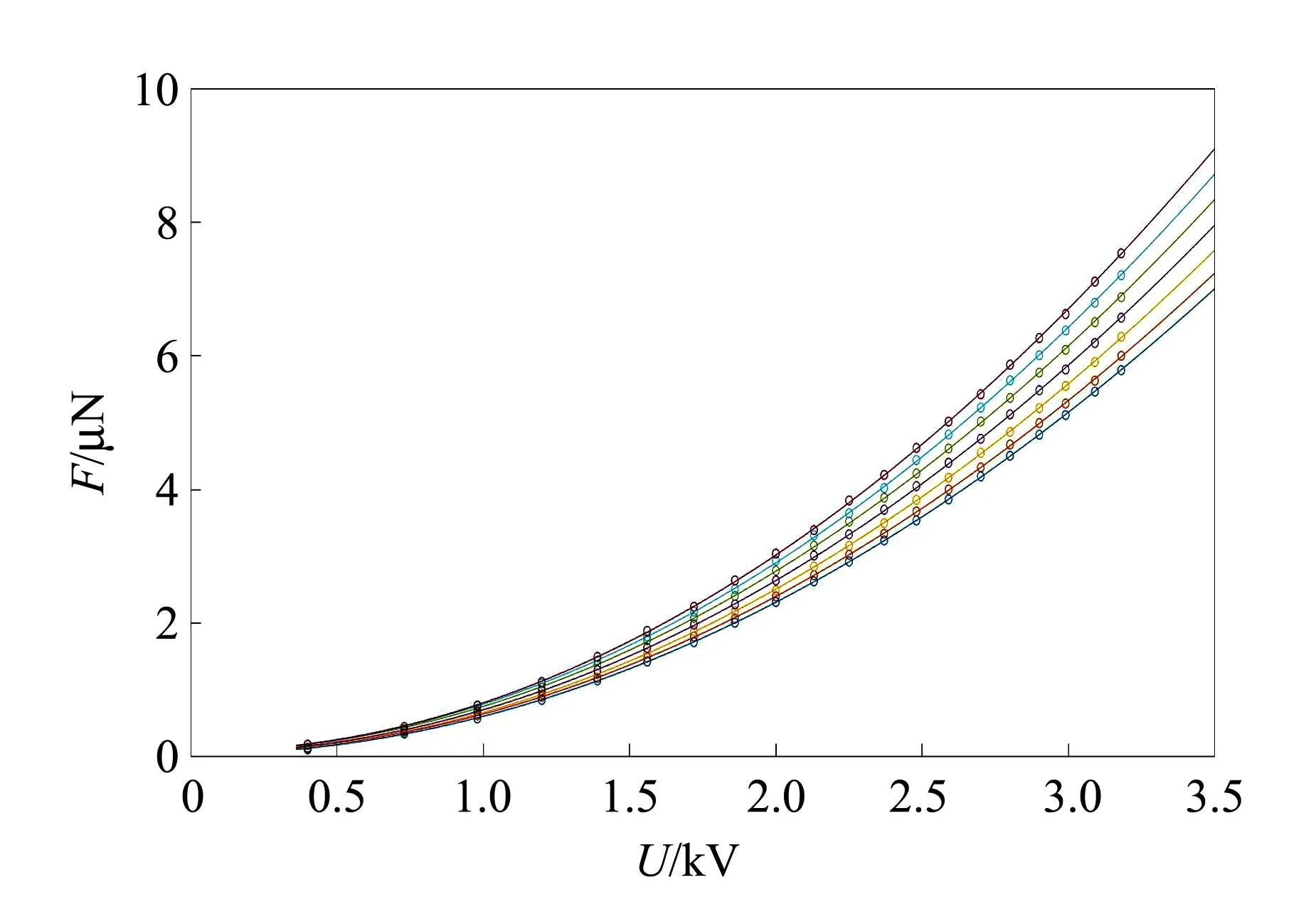
图7 不同控制距离下指针受力和极板间的电压关系
图7中实线为进行平方拟合的拟合线,圆圈为测量的数据点,不同颜色线代表在不同极板间距下的结果. 以某一位置为初始位置,分别向上移动0~6 mm,得到了图7中的7条线.不难看出,整体的拟合效果符合理论预期. 考虑到受力与电压的平方成正比,从数据拟合的准确度方面考量,直接将受力F与电压的平方U2进行线性拟合,结果如图8所示.

图8 指针受力与电压平方的关系
由图8可知,线性拟合的结果十分理想,这验证了量纲分析的正确性. 同时在电压较低时测量的受力只有0.1 μN,利用电场力的微弱作用,基本达到了在当前实验条件下系统的最高分辨本领.
4 结束语
本文利用大学物理实验中常用的稳压电源、示波器、万用表、激光器等设备制成了分辨率为0.1 μN的高分辨微力传感器,不需要进行定标操作,避免了传统测力手段在定标中引入的误差. 同时,装置处于封闭空间,隔绝了外界的空气扰动等不利因素,并利用这套设备测量了水的蒸发曲线、声音驻波的声压分布以及电场力等微小力,测量结果与预期符合较好. 这些微小力的测量印证了该系统的可靠性,且可直接测量得到许多之前无法直接测量的微小力学量.
在实验过程中,发现动态法的测量数据波动较大,这主要是示波器的采样深度不够导致的,可以替换为采样深度更高的设备进行动态法数据的测量. 此外,在声压分布的测量中该系统无法测量波腹附近声压力,主要是由于该系统没有反馈调节机制,在波腹附近受到声压力的正反馈偏移作用会使得指针无法稳定,未来可以通过为设备加装反馈调节手段来提升系统的可用性以及易用性.
致谢:感谢白在桥老师对本实验提供的支持!
猜你喜欢
青海草业(2022年2期)2022-07-23 09:23:12
娃娃画报(2019年5期)2019-06-17 16:58:10
电线电缆(2018年4期)2018-08-31 05:57:28
广东第二课堂·小学(2017年9期)2017-09-28 14:51:06
新乡学院学报(2016年6期)2016-12-01 05:21:38
电测与仪表(2015年5期)2015-04-09 11:30:42
黑龙江科学(2015年11期)2015-03-27 03:38:17
电测与仪表(2014年18期)2014-04-04 12:33:04
单片机与嵌入式系统应用(2014年9期)2014-03-11 15:35:09
物理与工程(2010年6期)2010-03-25 10:02:40
