
5000 m智能地质岩心钻机集成控制系统设计
2021-12-29 06:49孙军盈宋志亮臧臣坤黄江涛薛善忠孙卫娜余天歌
地质装备 2021年6期
孙军盈,宋志亮,臧臣坤,黄江涛,薛善忠,孙卫娜,余天歌
(1.中国地质装备集团有限公司,北京 100016;2.中地装(北京)科学技术研究院有限公司,北京 100120)
0 引言
随着人类对地球深部未知区域的探索需求和国家对深部资源的战略勘查钻探需求,深孔钻探工程逐步增加。深孔钻探意味着需要使用的钻井设备功率加大,功能更加复杂,辅助设备的种类和钻具的配置更加繁多,所占用井场的面积也更大,对司钻人员来说,操作控制庞大复杂的系统也是一种极大的挑战。对于传统中浅孔钻机,无论是立轴钻机、液压动力头钻机,还是便携式钻机或散装模块化钻机,司钻人员操控机械手柄、液压手柄旋钮以及司钻房电气辅助操纵,司钻一人基本可以对钻机进行全方位操控,完成正常钻进和起下钻,甚至可以不使用监控辅助,目视之处可及全场。深孔钻机需要操控的设备和需要协同使用的设备增多,需要多人操作设备协同作业的工作场景也增多,因此必须对设备集中控制,将操控人员集中起来[1-6]。
5000 m智能地质岩心钻机控制系统使用分布式布置,集中式操控,统一控制系统平台,统一人机接口。司钻控制使用一体化司钻座椅,人机接口简约,姿态多维度可调,降低司钻疲劳;主副司钻统筹协作,减少辅助作业时间,提高作业效率。
1 控制系统概述
5000 m智能地质岩心钻机以电气传动为主要能量传输形式,液压和气动为辅助传动形式;控制层面,以电控为主,电控气和电控液为辅;通讯方式以工业以太网为主,其他方式为辅。其控制内容主要包括钻机主体、井口自动化工具、液压动力站控制等几大部分,具体控制内容见图1。

图1 5000 m智能地质岩心钻机控制内容框图
1.1 钻机主体
旋转钻井工艺的提升、回转、泥浆循环三大系统都通过VFD房的控制器进行逻辑控制,这是钻机的核心部分。主要控制内容包括绞车盘刹控制、主绞车控制、绳索取心绞车控制、自动送钻控制、转盘控制以及顶驱控制。
VFD房的控制器通过工业以太网西门子S7协议、RJ45接口和屏蔽双绞线电缆形式与司钻房的主交换机进行数据交换。
1.2 井口自动化工具
井口自动化工具包含自动井架工、动力猫道和铁钻工。这部分设备的控制设计为独立控制单元,每个单元都自带控制器,自成系统,在仅提供电源的情况下,可以通过自带的远程遥控器进行便携式操作和本地液压手柄操作,以树形网络结构将它们和主交换机连接起来进行数据交换。这样既做到独立控制、集中操控,又将其和主系统的网络组态隔离。
1.3 液压动力控制
5000 m智能地质岩心钻机包含综合液压动力站和猫道液压动力站两套液压动力站。综合液压站放置于钻台面以便为顶驱、铁钻工和井架工提供动力源,每台设备的液压泵单独启停。为了减少从猫道机本体到猫道液压站液压管线长度,将猫道液压站放置在动力猫道机附近。
由于顶驱、猫道机和井架工均为间歇工作方式,需要在不工作时关闭液压泵,在需要的时候再打开,因此必须能够对泵进行远程控制和监控。为实现此功能,增加了一台液压站控制箱,将其安装于钻台面合适位置。控制箱内部安装I/O模块,作为司钻房控制柜PLC的智能I/O使用。
2 集中控制系统设计
2.1 总体设计
5000 m智能地质岩心钻机控制系统的主要控制设备和控制单元如表1所示。系统采用树形网络结构,树形网络延伸性和扩展性好,系统升级方便,同时树形网络在分支设备出线故障时,只影响局部,不影响整个系统,钻机系统拓扑结构如图2所示。
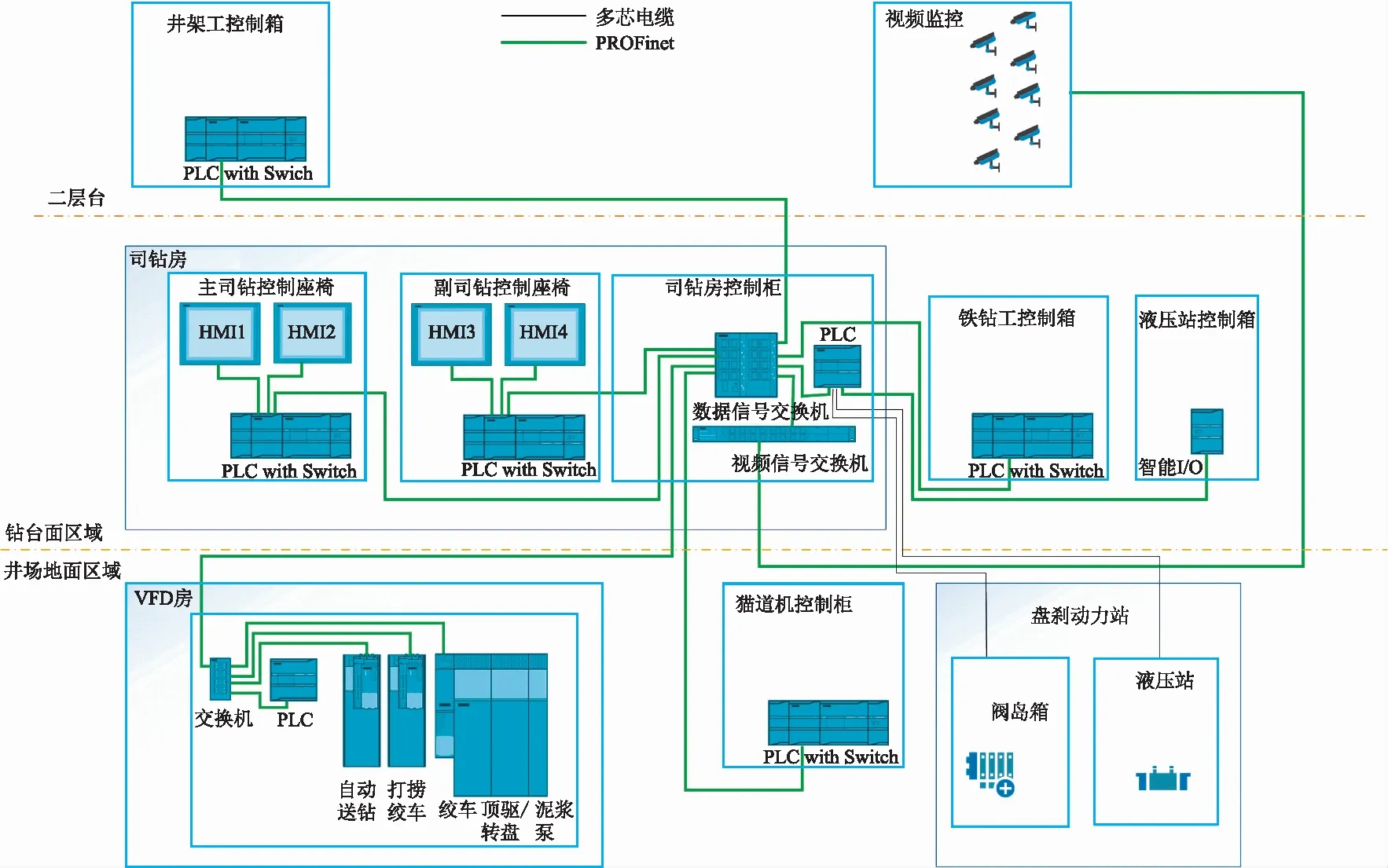
图2 5000 m智能地质岩心钻机控制系统拓扑结构图

表1 5000 m智能地质岩心钻机控制单元
5000 m智能地质岩心钻机对钻机的集中控制系统设计时兼顾到控制系统平台统一性、操作功能集成简约化设计、司钻房空间利用率、视频监控系统兼容性及人体工程学等几个方面。
2.2 一体化司钻座椅集成控制
无论是陆地大型油气钻机,还是海洋钻井平台,钻台面的空间永远是寸土寸金,捉襟见肘,因此留给司钻房的空间是有限的[7-9]。如果不进行综合考虑,很难充分利用司钻房的空间。目前大部分电传动钻机的司钻房布置是操作台+工程座椅的形式,以钻机的主要部分(绞车、转盘、泥浆泵)为控制对象来进行布置,如果后期增加顶驱、猫道机等设备,需要再辟出额外的空间放置其操作盒。
图3为典型的电传动司钻房内部,顶驱的操作盒单独放置于操作台上部,如果再增加猫道机、铁钻工、井架工等设备,无论是安放还是操作都会变得极其困难。此外,为了提高钻井效率,管柱操作可以由副司钻进行离线作业,不需要占用主司钻作业时间,在需要增加副司钻工作位时,此种常规布置形式更加难以实现。因此,一体化司钻座椅的设计凸显其优势。一体化司钻座椅的另一个优势就是将控制系统集中设计布置在一套工程座椅上,形成一个总成,使司钻房的结构设计和布置更加灵活,降低了协同设计的难度,增加了系统的可靠性。

图3 典型的电传动钻机司钻房内部
5000 m智能地质岩心钻机使用一体化司钻座椅,座椅集成了绞车、转盘、顶驱、泥浆泵、绳索取心绞车、自动送钻、盘刹、自动井架工、铁钻工、动力猫道机、动力卡瓦的控制。
2.3 司钻座椅操作功能的简约集成化设计
国内的大型电传动的油气钻机产品以集成化设计为主,很少有像NOV公司这种产品链齐全、可以提供完整钻井包的厂家,其所有设备的控制都在一个统一系统架构之下,接口统一,人机界面一致。国内的采购一方面限于主机厂的能力,一方面限于一次性投入的成本考虑,会从多个厂商采购设备然后组合。这种方式虽然配套灵活,各类设备操作能独立成体系,互不干扰,但司钻房的空间布置凌乱,操作元器件无法交叉重复使用,造成空间浪费,系统兼容性变差,协同性变难,对司钻的操作使用提出更高的要求。
5000 m智能地质岩心钻机控制系统使用统一平台,统一界面,统一接口;不同时使用的设备,操作元器件共用;减少实体钮、灯的使用,对于非重要和操作频次低的控制元器件使用虚拟开关;增加虚拟仪表的使用,减少物理仪表的空间占用。
2.4 统一控制系统平台,简化接口
传统电传动钻机的各独立设备使用的控制器不尽相同,人机界面风格迥异,通讯协议众多,相互之间通讯交互困难。
5000 m智能地质岩心钻机无论是主机部分控制,还是井口自动化工具的独立控制,均使用西门子S7-1200 PLC及S7通讯协议,人机界面统一,使用WINCC平台开发。接口设计遵循“高内聚,低耦合”的原则,简化控制接口,降低操作难度[10]。
2.5 集成兼容监控系统设计
一般钻机的CCTV监控系统都是独立的,司钻房安装一套主机,再安装一台悬挂式监视器。
5000 m智能地质岩心钻机使用PoE供电的网络摄像头,通过司钻房控制柜安装的一台PoE交换机进行供电和传输视频信号,然后将视频信号交换机接入控制系统网络,再通过安装在副司钻的监控客户端解码显示,主司钻通过WINCC平台进行解码显示,可以将视频嵌入任何一张控制画面。
2.6 人体工程学座椅设计
一体化司钻座椅采用人体工程学设计,座椅可通过遥控器在四个维度调整姿态,触摸屏的支架可以旋转和前后倾调节位置方向。通过座椅和屏的共同调节,可以让司钻一直处于一种比较舒适的作业状态,从而减轻疲劳,降低误操作风险。
5000 m智能地质岩心钻机的司钻座椅高度为1500 mm,可在90°~120°范围内手动调整触摸屏支架倾角,可电动调整座椅前后部升降(50 mm)、前后倾角(90°~160°)及前后位置(240 mm)。
3 主要设备的集成控制
3.1 盘刹集成控制
3.1.1 盘刹动力源的集成
盘刹的控制包含主绞车的盘刹和绳索取心绞车的盘刹。由于主绞车和绳索绞车在钻井施工时不会同时使用,因此,在设计时将主绞车的盘刹动力源和绳索取心绞车的动力源设计为共用一套液压动力站,节省了钻台面空间。
3.1.2 盘刹操作手柄的集成
主绞车盘刹包括安全钳和工作钳。安全钳通过碟簧带动钳头刹车,液压松开,主要作为驻车使用,只有在紧急制动时参与动态刹车,因此在主司钻一体化座椅上设计了一个驻车旋钮和一个紧急制动按钮,通过开关量来控制。工作钳通过液压缸带动钳头刹车,泄油后弹簧松开,刹车力矩通过调节供油压力的大小来实现,因此,在主司钻一体化座椅上设计一个模拟量信号的手柄来进行控制。
绳索取心绞车只安装有一套安全钳,作为在打捞岩心过程中绞车失控时紧急刹车使用,同时,还可以通过控制盘刹实现无动力下放打捞矛。同样通过调节供油压力大小来调节刹车钳的刹车力矩,因此也需要使用一个模拟量手柄来进行控制。
基于以上分析,可以将主绞车的盘刹手柄和绳索取心绞车的盘刹手柄合二为一,通过切换开关来切换盘刹手柄的功能,实现集中控制。
3.2 主绞车、绳索取心绞车及自动送钻控制
主绞车和打捞绞车速度控制以及自动送钻的手动速度控制共同使用一个控制手柄。手柄的控制权由绞车切换旋钮确定,该旋钮为三位自复位旋钮,控制状态有三种:绞车模式、打捞模式和无选择模式。在绞车模式时,绞车/打捞选择状态显示为绞车,手柄切换为控制绞车;在打捞模式时,绞车/打捞选择状态显示为打捞,手柄切换为控制打捞绞车;在绞车模式或者打捞模式下,再切换一次当前的状态,会退出当前选择,变成无选择模式,在无选择模式下,可以通过手柄来控制自动送钻。
3.3 顶驱和转盘的集成控制
5000 m智能地质岩心钻机同时配置有转盘和顶驱,但是不会同时使用,属于多功能配置。转盘通过一台250 kW电机驱动,顶驱通过两台132 kW电机驱动。因此,在使用转盘时,转盘通过一台功率为250 kW的变频器驱动,在使用顶驱时,顶驱电机其中一台由转盘变频器驱动,另外一台由一台功率为132 kW的变频器驱动。参数配置方案则通过变频柜门上的旋钮来进行切换选择,而人机控制界面的操作及显示则需要在HMI界面的顶驱转盘选择按钮来实现切换,见图4。

图4 顶驱转盘功能选择界面
3.4 井口自动化工具的集成控制
井口自动化工具包含自动井架工、铁钻工和动力猫道机,三者用来传输和建立管柱,可以配合主司钻加接杆,也可以离线上下钻具。该功能设计为完全由副司钻来操作,这3个设备都为多自由度、多维度运动,需要多轴操作,因此使用副司钻座椅左右扶手的两个多功能十字手柄操作[11-14]。由于这3个设备属于顺序流程作业,不需要同时动作,因此,将左右手柄设计成复用功能,功能通过扶手上的3位选择开关来进行切换。
3.4.1 自动井架工
自动井架工运动有小车前后移、大臂旋转、大臂升降、小臂升降和小臂倾斜5个自由度。其中,前4个为比例阀控制,使用模拟量输出。手柄功能定义和操作界面如图5所示。
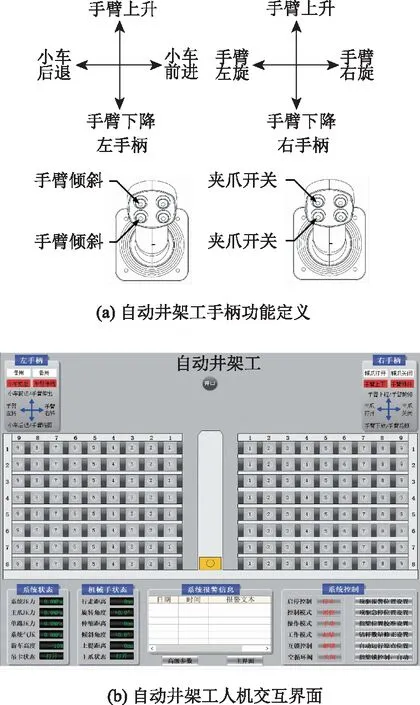
图5 自动井架工控制示意图
3.4.2 动力猫道机
动力猫道机大臂的升降和小车的前后移动使用比例阀控制,需要手柄的模拟量来控制,其他动作均为开关量阀,使用手柄的按键来操作,手柄功能和操作界面如图6所示。

图6 动力猫道机人机交互界面
3.4.3 铁钻工
铁钻工有钳体的伸缩和升降两个自由度,这两组动作需要调节运动速度,因此使用比例阀进行控制,其他均使用开关阀控制,操作手柄功能定义和操作界面如图7所示。
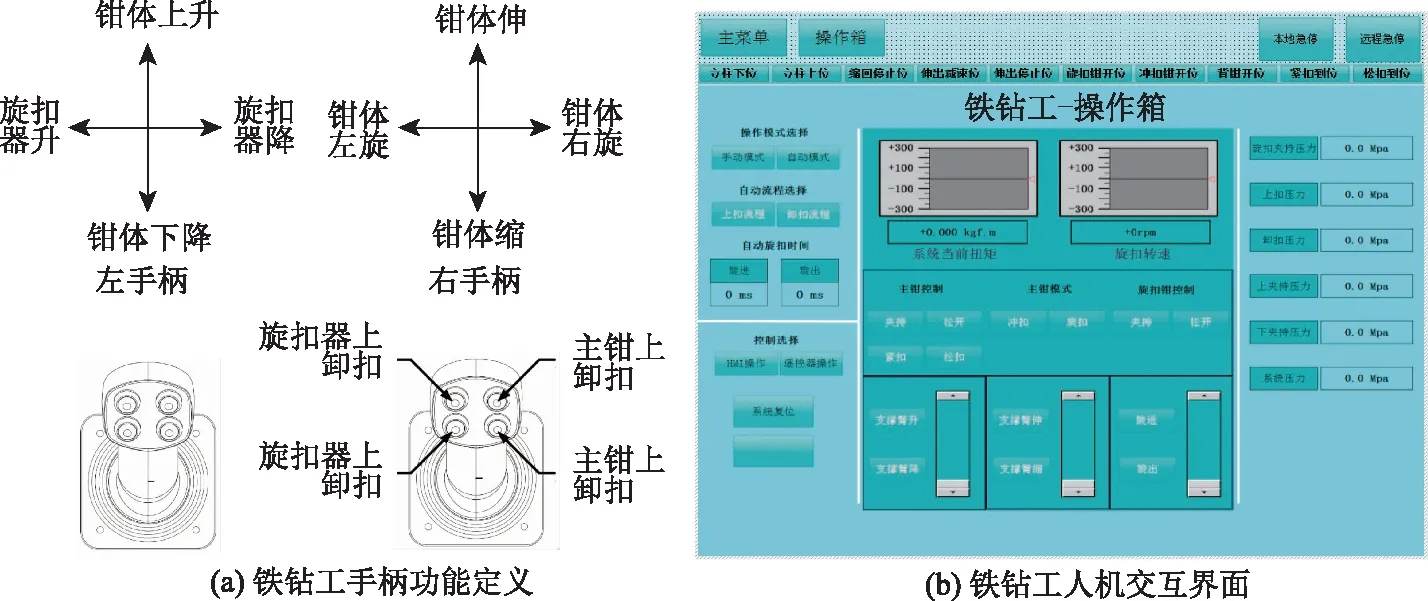
图7 铁钻工人机交互界面
4 结语
大型复杂陆地钻机、海洋钻井平台、海洋钻探船,从空间布局和控制系统拓展性考虑,集成控制系统都将是一种必然选择。司钻操作形式无论是从钻机使用便捷性、作业流程协同性、研发生产统筹性考虑、还是人体使用工程学考虑,一体化司钻控制座椅都将会是一种发展方向[15]。
一体化司钻座椅集成的虚拟按键和仪表逐步替代物理按键和仪表将会是一种发展趋势。现代控制元器件的稳定性正在被逐渐验证,在控制系统冗余的情况下,虚拟仪表的稳定性得到保障,其优势也得以发挥。同时虚拟仪表的使用也能减少司钻房气液管线的布置,让司钻房保持一个清爽的环境[16]。本钻机在设计过程中,HMI界面设计有虚拟仪表,司钻房同时保留有物理形式的指重表、泵压表、气压表、盘刹的压力表。在5000 m智能地质岩心钻机工程试验阶段,司钻人员在整个工程试验过程中,几乎不用再关注过物理仪表。
一体化司钻座椅的功能拓展性优良,可以进一步研究拓展一体化司钻控制座椅的功能,尝试将录井功能纳入控制系统网络,形成统一的信息平台,实现数据共享;增加班报表输出功能,通过自动记录数据输出班报表并打印,再人工输入记录部分信息,形成真实数据加人工记录的形式。
猜你喜欢
中国设备工程(2022年17期)2023-01-02
机械工程师(2022年7期)2022-07-15
石油工业技术监督(2021年3期)2021-03-16
装备制造技术(2020年11期)2021-01-26
电子制作(2018年11期)2018-08-04
中国设备工程(2017年19期)2017-10-24
中国设备工程(2017年7期)2017-04-10
科技与企业(2015年18期)2015-10-21
同煤科技(2015年4期)2015-08-21
科普童话·百科探秘(2015年5期)2015-05-26
