
基于图像特征检测动车底部螺栓丢失故障
2021-12-28 22:06马凌宇
科技尚品 2021年11期
马凌宇


摘 要:交通事业对我国的经济发展至关重要,高速动车组则使人们的出行更加便捷,但在高速动车组高速行驶状态下,动车组的运行安全便成为重中之重。组成动车底部的零部件繁多且结构十分复杂,传统的人工列检方式难免出现疏漏,不仅会危及动车组乘客的人身安全,同时也会对列检工作人员产生不利影响。为了实现对动车底部故障的快速检测,可以借助动车组运行故障图像检测系统。其主要采用图像对比识别技术实现动车底部图像的检测,并结合人工复检最终确定故障情况。文章以动车底部螺栓丢失故障为例,采取基于图像特征检测对比方法,有效清除底部螺栓丢失故障。
关键词:图像特征检测;动车底部;螺栓丢失故障
中图分类号:U216.3 文献标识码:A 文章编号:1674-1064(2021)11-122-03
DOI:10.12310/j.issn.1674-1064.2021.11.041
铁路发展对国民经济增长具有重要作用,随着中国铁路的不断创新,中国铁路逐渐成为世界铁路的“领跑者”,铁路运行安全也成为各项工作的重中之重。应及时检测列车故障,确保高速动车组安全平稳运行。動车底部故障检查需要列检工作人员进入车底,运用传统检查方式检测,无法保障列检工作人员的人身安全[1-2],而且动车底部零部件众多,列检工作人员工作量繁重,容易出现失误情况,危及动车运行安全[3]。如今,在科学技术飞速发展阶段,可以采用动车组运行故障图像检测系统实现动车组底部安全监控,经图像特征检测对比方法确定动车底部故障情况,并予以改善[4]。
1 图像故障检测的基础
1.1 TEDS图像采集系统
TEDS图像采集系统可实现对动车组底部、侧部等部位部件的图像采集工作,在轨道上设置9个相机,可采集动车组不同部位部件的图像。相机的分辨率最小值为2 048像素/线,帧率最小值为48 kHz;图像格式主要为jpg。图像采集系统可将图像传输至图像处理计算机,计算机将原图像保存,保存后处理图像,将处理结果予以反馈,获取动车组部件情况。
1.2 动车组图像预处理
1.2.1 对比度增强
动车组底部图像采集受到多种因素的影响,主要包含采集时间段的天气、采集地点的环境、太阳光照情况等因素,动车组底部图像偏暗,肉眼无法直接判断动车组底部部件故障情况,容易出现漏检或者误检情况。重视动车组图像预处理工作,调节动车组底部图像对比度,降低漏检、误检出现的概率。图像对比度增强主要解决图像灰度级范围小出现的对比度低问题,放大输出图像灰度级,让图像变得清晰。最常用的对比度增强方法主要有伽马变换、直方图均衡化、线性变换等,文章以伽马变换算法实现动车组底部部件图像增强处理。
1.2.2 畸变矫正
动车组底部部件图像主要以固定相机通过固定频率拍摄而获取,动车组匀速运行,相机每次采集的图像大小固定,但这是理想化状态。动车组运行期间受到摩擦力、空气阻力等多种因素影响,相机采集的图像会发生变化,从而使得图像出现几何畸变。
为保障图章故障检测算法质量,需处理图像几何畸变情况,由于几何畸变主要表现为伸缩变换,确定伸缩比例因子后,可通过伸缩比例因子调整实现图像几何畸变的有效矫正。
1.3 图像配准技术介绍
1.3.1 基于灰度的图像配准技术
利用图像的灰度信息进行配准,对图像像素点的灰度信息予以充分利用,对两幅图像空间关系情况予以明确。此种算法对图像灰度信息十分敏感,但由成像原理不同的设备进行拍摄,图像在分辨率、色彩等方面有较大的差异,使得图像配准精度受到影响。而基于灰色图像配准算法可对灰度信息充分利用,保障了配准精度,满足了图像空间关系确定要求。除却基于灰色图像配准算法外,比值匹配法、线匹配法也可实现两幅图像空间关系确定,其中比值匹配法主要以部分像素的比值作为模板,寻找图中最优位置,确保图像的高效配准;线匹配法能够将图像仿射变化问题解决,实现图像的配准。
1.3.2 基于特征的图像配准技术
通过对两幅图像相同特征信息的提取,匹配,实现对两幅图像空间对应关系的确定。基于特征图像配准算法的自由度高,运行速度快,但仅能运用在图像小部分信息,但配准偏差较大,容易出现误匹配情况,降低图像匹配精度。
随着技术不断发展,图像配准特征提取算法可从特征描述、特征相似度量、特征匹配效率、图像质量等多方面考虑,确保图像匹配的准确性。基于特征的图像配准技术的运行效率高,配准效果良好,成为动车组底部图像配准的主要方法,而SIFT特征提取算法、SURF特征提取算法的不断发展,使得基于特征的图像配准技术持续完善,对其广泛运用起到积极作用。
2 基于暗边缘特征的动车底部螺栓丢失检测
2.1 动车底部螺栓边缘特征
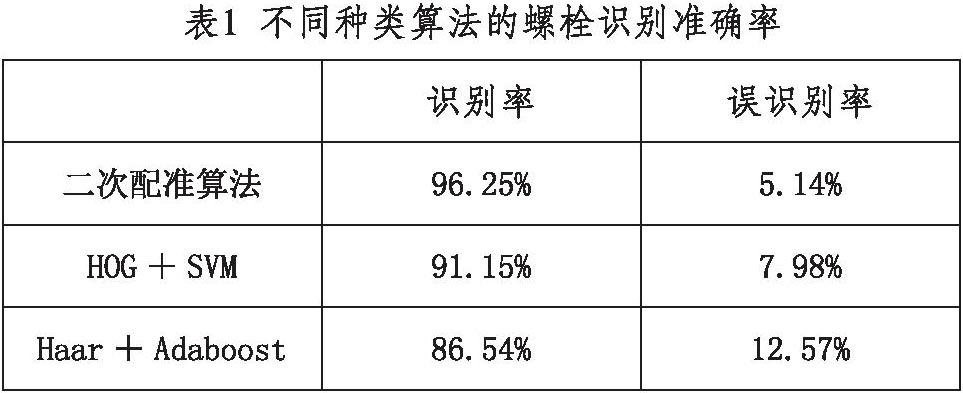
在动车组底部,应通过观测动车组底板图像而将底板螺栓区域灰度特性予以统计,且动车组底部边缘的螺栓图像像素点明显低于中间位置,可将动车组底部螺栓边缘像素点设置为(x,y),满足式r12<(x-x0)2+(y-y0) 其中,(x0,y0)表示动车组底部螺栓中心像素坐标,G表示为灰度值界限(动车组螺栓边缘与螺栓中心的灰度值界限);t为阈值(大于15);r1为螺栓内边缘半径,r2为螺栓外边缘半径。由式(2)和式(4)可得式(5):I(x1,y1)-I(x,y)>t。 动车组底部螺栓的暗边缘特征主要因为其他部分比螺栓头部低一些,在光照中,螺栓边缘则会将螺栓阴影部分突出显示,进而表现出螺栓暗边缘特征。 一旦动车组底边螺栓丢失,动车组底板嵌入螺栓部位则会出现小孔,而动车底部螺栓部位因螺栓头部的保护而出现光泽。可将动车组底部螺栓丢失区域边缘像素点设置为(x,y),满足式r32<(x-x0)2+(y-y0) 2.2 螺栓丢失检测 2.2.1 螺栓丢失检测方法 针对动车底部螺栓丢失故障,可运用亮边缘特性检测方法进行检测,其具有简便性与准确性特征。充分选取8个螺栓中心区域灰度均值以及丢失螺栓中心点,计算丢失螺栓中心区域灰度均值,即Im;随后取4个螺栓边缘区域灰度均值计算丢失螺栓边缘区域灰度均值,即Ie;螺栓正常,Im>Ie;螺栓丢失,Ie>Im。 2.2.2 螺栓丢失检测算法流程 从动车组底部螺栓图像预处理入手,利用螺栓特征点快速剔除非螺栓特征点部位,确保动车组底部螺栓部位准确,且经非极大值抑制消除同一螺栓表现出的多点响应情况,最终利用螺栓丢失检测算法实现对螺栓部位的精准检测,识别螺栓丢失故障,并及时给予维修,保障高速动车组运行安全[5]。 2.3 实验过程 2.3.1 实验数据获取 本项研究采用的动车组图像来自TEDS集中监控中心,并选取500张螺栓分布广泛的图像区域,确保每张图片中含有的螺栓数量为4~6个。为了完成对比性质较为强烈的验证实验,可将80%的图片作为训练集,将20%的图片作为测试集。从500张图片中随机选取150张,模拟1~2个底部螺栓丢失的故障。究其原因,高速动车组螺栓丢失故障图像较少,因此,可运用模拟方法实现螺栓丢失故障的模拟。 2.3.2 实验结果分析 文章基于特征配准方法和模板匹配方法提出二次配准算法,并对比此算法与HOG+SVM螺栓识别算法、Haar+Adaboost螺栓识别算法的性能,确定不同种类算法的螺栓识别准确率,如表1所示。比较基于灰度差值的螺栓丢失故障检测算法与二次配准算法的性能,即两种算法的螺栓丢失故障识别率,如表2所示。 通过表1、表2可知,基于特征配准方法和模板匹配方法提出的二次配准算法,在螺栓识别方面明显优于其余两种螺栓识别算法,螺栓识别的准确性较高;而二次配准算法在螺栓丢失识别率方面,低于基于灰度差值的螺栓丢失故障检测算法,但在误识别率方面明显优于后者,具有较高的精准性。究其原因,传统的灰度差值故障识别算法受到图像亮度的影响较大,很容易出现误检率,增加列检工作人员的故障检测工作量[6]。而二次配准算法能够准确快速地识别螺栓点,可准确识别因不存在螺栓丢失故障而表现出的亮边缘特性,避免将其识别为螺栓丢失,增加螺栓丢失故障的误识别率[7]。 3 给予HOG特征图像块描述 HOG特征可生成特征向量,主要通过计算和统计图像局部区域梯度方向直方图得到。其是运用在目标检测中的特征描述子,具有诸多优势,可在图像特征识别中广泛运用。HOG特征描述子具有抵抗性,能够抵抗图像几何形变、亮度变化产生的影响;HOG特征描述子可适应人体轻微动作,降低误差。在铁路图像识别中,HOG特征识别法被广泛运用,其可使用特征向量描述图像块。利用Gamma算子实现描述图像块的校正,大大降低目标图像亮度变化产生的影响。利用[﹣1 0 1]梯度算子与原始图像的卷积操作,获取图像块中每个像素点的水平方向梯度;利用[﹣1 0 1]T梯度算子与原始图像的卷积操作,获取图像块中每个像素点的竖直方向梯度分量。此外,也可利用式(11)计算图像梯度幅值,利用式(12)计算图像梯度方向。其中,梯度幅值用G表示,水平方面梯度用Gx表示,垂直方向梯度用Gy表示,梯度方向用θ表示。 划分多个细胞单元cell,利用公式计算每个细胞单元中的梯度直方图。动车组图像块大小为128×128,因此,细胞单元大小为8×8。按照0、20、40、60、80、100、120、140、160的标准将0~18度梯度方向进行划分,即bin;确定像素点的梯度方向,并将该像素点的梯度幅值(G)加入梯度方向对应的bin区间,即像素点梯度方向为20度,其梯度幅值(G)加入20度对应的bin区间。若梯度方向不是特殊角,应采用插值方法实现像素点梯度方向的计算,随后将幅值插入直方图中。利用大小为2×2的单元格block划分cell,并将单元格向量归一化,降低光照等因素对特征向量的影响。最后,将单元格特征向量进行串联,获取HOG特征向量,实现对图像块内容的描述。 4 结语 综上所述,高速动车组底部螺栓丢失故障发生率较低,但也存在发生的可能性。一旦出现动车底部螺栓丢失故障,危害性较大,强化动车底部螺栓丢失故障检测工作,对保障高速动车组的运行安全有积极作用。以往采用的基于灰度差值的故障识别算法存在较高的误差率,影响了底部螺栓丢失故障的检查准确性。 基于此,改进动车组底部螺栓丢失故障检测算法,运用基于图像特征的检测方法,可提升动车底部螺栓丢失故障的检测准确率,减轻列检工作人员的工作量。 参考文献 [1] 胡绍海,易果.基于暗边缘特征的动车底板螺栓故障检测[J].电脑知识与技术,2020,16(13):214-217. [2] 路绳方.复杂场景下动车底部螺栓丢失故障的自动检测[J].激光与光电子学进展,2017(11):291-297. [3] 宋丫,李庆楠,刘宵辰.基于深度学习的目标部件故障识别技术及应用[J].信息通信,2019,194(2):55-58. [4] 赵欣欣,钱胜胜,刘晓光.基于卷积神经网络的铁路桥梁高强螺栓缺失图像识别方法[J].中国铁道科学,2018,39(4):56-62. [5] 王勇,袁啸阳,陈铎,等.基于多任务卷积神经网络的轨道车辆螺栓异常检测方法[J].铁道车辆,2020(5):29-32. [6] 刘彬.动车组运行故障图像检测系统(TEDS)运用研究与思考[J].中国铁路,2017(12):61-65. [7] 杨梁崇,马楠.基于射频识别技术的动车组走行部关键部件螺栓防松脱预警系统[J].甘肃科技纵横,2019,48(11):28-31.
