永磁同步电机无位置传感器控制下的参数辨识
2021-12-28 03:20:42方伟明
浙江科技学院学报 2021年6期
方伟明,康 敏
(浙江科技学院 自动化与电气工程学院,杭州 310023)
永磁同步电机(permanent magnet synchronous motor,PMSM)因具有结构简单、损耗小、功率密度高、响应速度快等特点,被广泛应用于工业生产、新能源汽车及航空航天等高性能控制领域[1]。在一些应用场合中,由于安装机械式传感器会造成系统成本增加、体积增大及可靠性降低等问题,此时可以通过无位置传感器算法来估计PMSM的转子位置和转速。常用的PMSM无位置传感器算法主要有高频信号注入法[2]、反电势积分法[3]、扩展卡尔曼(Kalman)滤波器[4]及滑模观测器[5]等。其中,反电势积分法因具有实现简单且在电机中高速运行时估计准确的特点,被广泛地应用在PMSM转子位置和转速估计中。
由于PMSM的长期运行或工况发生变化,受温度上升、磁饱和及负载扰动等因素的影响,电机参数会发生变化,而这将导致观测器及控制器性能下降,甚至会导致PMSM矢量控制系统出现故障[6-7]。因此,PMSM参数的在线辨识对矢量控制系统故障诊断及控制效果的稳定非常重要。许多研究者在PMSM的参数辨识方面做了探讨,年珩等[8]利用递归最小二乘法对永磁风力发电机的d、q轴电感进行实时辨识,并将辨识得到的电感值应用于发电机转子位置观测和矢量控制中,从而提高了转子位置的估算精度和永磁风力发电机的矢量控制性能。李旭春等[9]提出了一种具有参数辨识的永磁同步电机无位置传感器方案,运用扩展卡尔曼滤波器对转子磁链和交轴电感同时进行在线辨识,取得了良好的辨识效果。黄松等[10]提出了一种新的自适应变异粒子群优化算法,可以同时辨识PMSM定子电阻、交直轴电感及转子磁链,实现电机的多参数在线辨识。然而上述参数辨识算法都较为复杂,运算量较大,在考虑微处理器运算能力有限和开关频率限制的情况下,辨识算法不易实现。张红[11]在无位置传感器控制下的PMSM参数辨识中采用的模型参考自适应算法(model reference adaptive system,MRAS)运算简便,易于实现,在低成本电机参数辨识解决方案中具有优势。
在上述研究的基础上,本研究以冷却系统中常见的鼓风机用永磁同步电机(permanent magnet synchronous motor,PMSM)为参数辨识对象,提出一种无位置传感器矢量控制下的PMSM参数在线辨识方案,通过无位置传感器算法估计电机转子位置、转速及永磁体磁链,利用改进的MRAS在线辨识电机的定子电阻和定子电感。与传统的MRAS自适应律相比,参数整定个数从4个减少到了2个,从而简化了传统MRAS中自适应律的参数整定过程;通过本参数辨识方案,在同一时间尺度下实现了PMSM的转子位置、转速、永磁体磁链、定子电阻和定子电感的在线辨识。最后,通过搭建的试验平台对本方案的可行性和有效性进行了验证。
1 基于MRAS的电机参数在线辨识模型的构建


图1 PMSM的MRAS参数辨识原理
本研究中MRAS在线辨识针对电机定子电阻和电感,以d、q轴电流作为状态变量,PMSM数学模型可表示为
(1)
式(1)中:p为微分算子;id与iq、ud与uq分别为d、q轴电流和电压;Rs为电机定子电阻;Lq、Ld为交直轴电感;ωe为电机电角速度;ψf为永磁体磁链;对于表贴式PMSM,Ld=Lq=Ls,Ls为电机定子电感。
令a=Rs/Ls,b=1/Ls,则式(1)可写为
pi=Ai+Bu+C。
(2)

以式(2)为参考模型,系统的可调模型为

(3)
将式(2)减去式(3),得到误差状态方程

(4)
从误差方程中可以看出,PMSM的自适应参数辨识系统由前向线性模块A+G和非线性时变反馈环节w构成。
2 MRAS自适应律的设计
MRAS参数辨识算法的关键是设计合适的自适应律来使参考模型与可调模型的输出误差收敛到零。根据波波夫(Popov)超稳定性原理可知,若要使MRAS辨识系统稳定,则需要满足2个条件[13]:1)辨识系统前向线性模块的传递函数严格正实;2)辨识系统非线性时变反馈环节满足Popov积分不等式。对于条件1可通过调节系统误差反馈系数k1、k2,使得系统前向线性模块传递函数A+G严格正实。条件2中定义的Popov积分不等式为
(5)
将式(4)中的w和电流矢量误差e代入式(5)可得
(6)
常用的参数辨识自适应律为比例积分控制器形式,即令
(7)

将式(7)代入式(6)可得
(8)
由式(8)可得PI(proportion integration,比例积分)形式的MRAS自适应律为
(9)
式(9)中:s为积分因子;Kf1、Kf2、Kg1和Kg2分别为PI形式的自适应律需要调节的参数。
从式(9)可以看出,PI形式的自适应律需要同时调节4个参数,参数整定过程较为不便。而本研究采用滑模控制器形式的自适应律,只需整定2个参数,设计滑模自适应律为
(10)
式(10)中:Ksw1、Ksw2为滑模控制器形式自适应律的滑模增益;sgn(x)为开关函数,当x≥0时,值为1,当x<0时,值为-1。
将式(10)代入式(6)可得
(11)

(12)


图2 表贴式PMSM的MRAS参数辨识模型结构
3 PMSM无位置传感器算法
在参数辨识过程中,ud和uq为电流环控制器输出值,在忽略逆变器死区和电机非线性的影响后,ud和uq与真实值之间的误差很小,可以直接使用。id和iq由采样电流经过坐标变换得到,而坐标变换需要知道电机实时转子位置,本研究通过无位置传感器算法进行转子位置的估计。
αβ静止坐标系下的PMSM电压方程满足
(13)
式(13)中:usα与usβ、isα与isβ、ψsα与ψsβ分别为α、β轴定子电压、定子电流及定子磁链。
通过对反电势进行积分可以得到PMSM在αβ静止坐标系下的定子磁链:
(14)
由于电压电流中存在初值误差和直流偏置,在对反电势积分时会出现磁链零漂[14],导致计算得到的定子磁链偏离真实值,因此需要消除积分零漂,常用的做法是,在对反电势积分后,用高通滤波器对定子磁链中含有的直流量进行滤除[15]。同时定子磁链还可以由自身绕组激励的磁链、与其他绕组作用产生的磁链及永磁体磁链在α、β轴上的分量组成,表示为
(15)
式(15)中:Lα与Lβ、Lαβ与Lβ α分别为α、β轴自感和互感;θ为转子位置;对于表贴式PMSM,Lα=Lβ=Ls,Lαβ=Lβ α=0。
则在α、β轴下的PMSM永磁体磁链可表示为
(16)

通过对ψfβ和ψfα的商求反正切,可以得到PMSM的转子位置。为提高转子位置的估计精度,本研究采用锁相环[16]进行转子位置的估计,得到PMSM转速和转子位置,其表达式为
(17)

4 试验结果与分析
为验证我们提出的无位置传感器矢量控制下的表贴式PMSM参数在线辨识方案的可行性与有效性,特以冷却系统中常用的鼓风机为被控对象,硬件平台采用意法半导体处理器STM32F103和英飞凌公司的功率模块IGCM10F60GA。试验采用的表贴式PMSM参数见表1。试验中设定开关频率为7.2 kHz,在鼓风机低速时采用恒流频比开环运行,当达到开环给定转速后利用q轴电流调节器切换至闭环,在闭环阶段进行参数辨识。本研究以转子位置估计是否平滑、锁相环转子位置输入误差的大小、参数辨识的收敛性和稳定性及鼓风机的转速性能作为系统参数辨识及矢量控制是否有效的标准。

表1 表贴式PMSM参数


图3 无位置传感器矢量控制下表贴式PMSM参数辨识系统
试验中,鼓风机从400 r/min开环转速切换至闭环1 000 r/min,图4为鼓风机在1 000 r/min稳定运行时的无位置传感器位置估计结果,图5为鼓风机切换至闭环后的转速和永磁体磁链估计结果。图6为鼓风机切换至闭环后的模型参考自适应算法d、q轴电流误差ed、eq波形。图7为PMSM定子电阻和电感辨识结果。
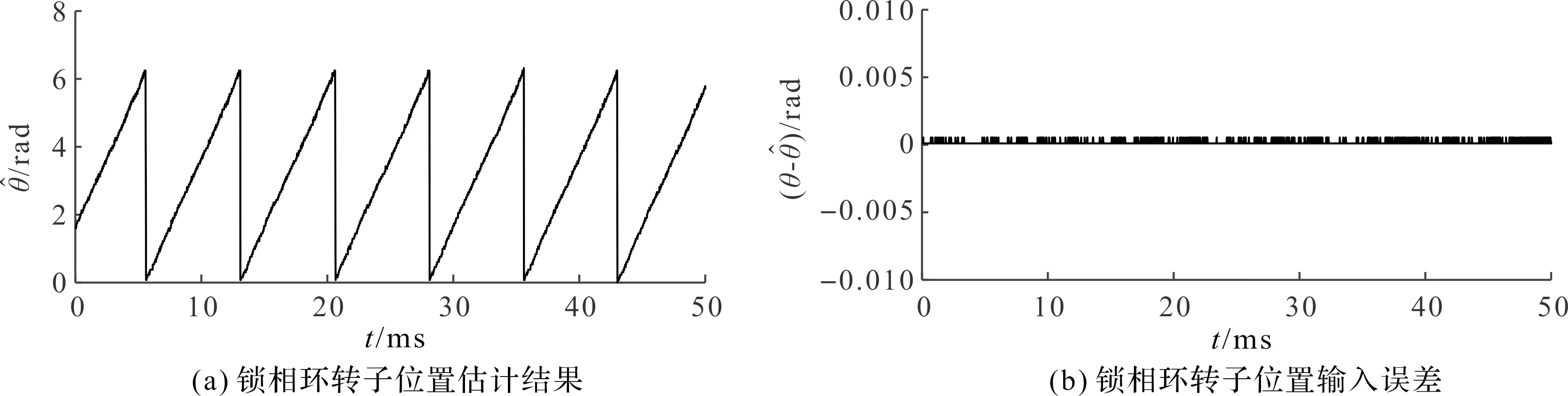
图4 位置估计和位置估计误差结果

图5 转速和永磁体磁链估计结果
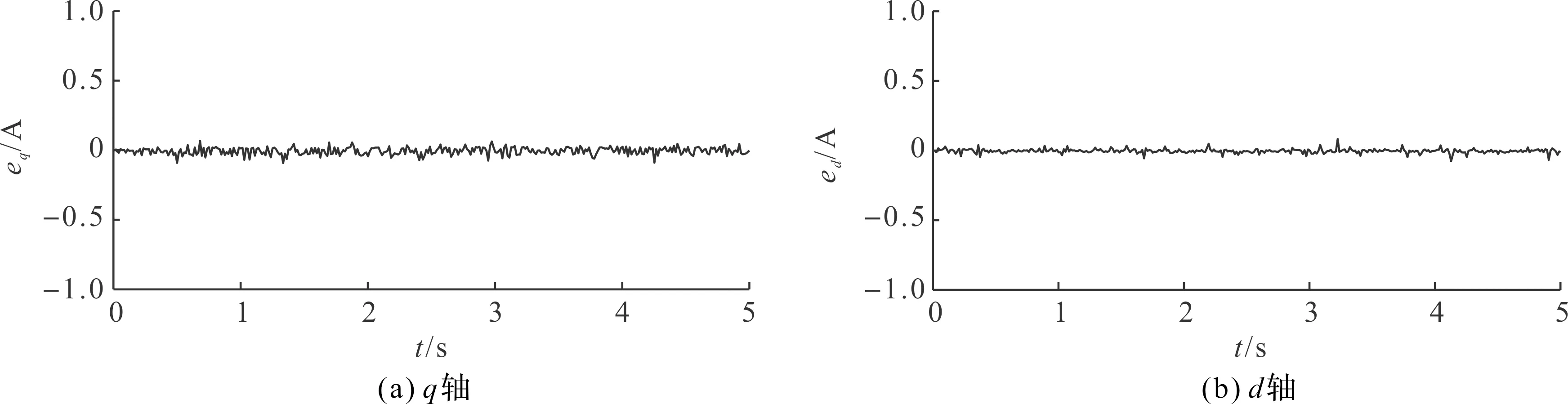
图6 MRAS辨识过程中d、q轴电流估计误差
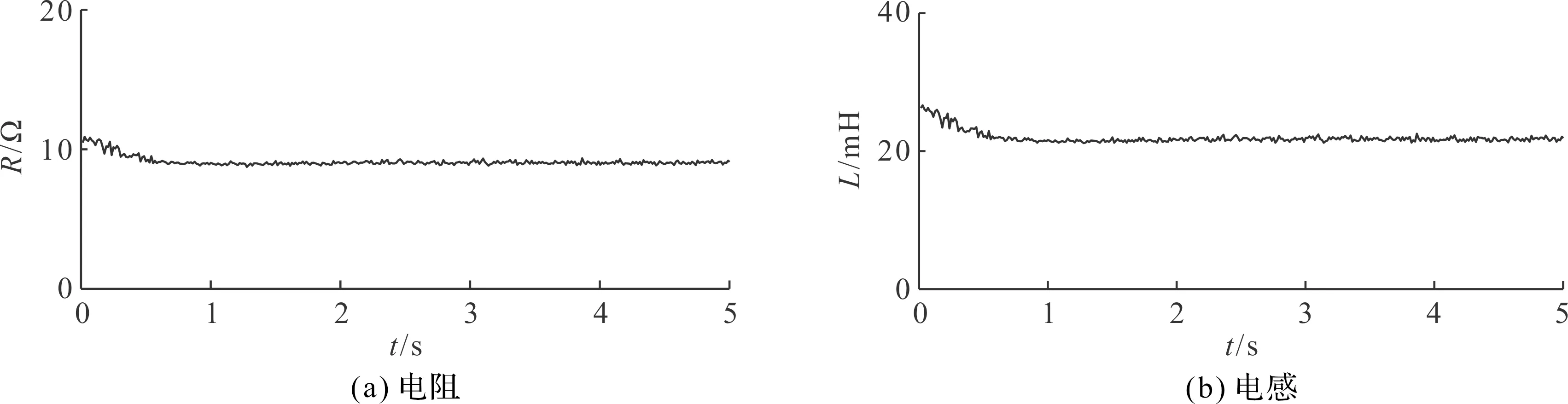
图7 电阻和电感辨识结果


表2 参数辨识结果
5 结 语
本研究在建立永磁同步电机数学模型的基础上介绍了MRAS参数辨识原理,搭建了MRAS参数在线辨识模型,采用一种滑模控制器形式自适应律的MRAS对PMSM的定子电阻和电感进行在线辨识,简化了传统PI形式自适应律的参数整定过程;同时参数辨识所需的电机转速和永磁体磁链由无位置传感器算法估计得到,在同一时间尺度下实现了PMSM的多参数辨识。将该参数辨识方案用于搭建的试验平台进行试验验证,结果表明,MRAS参数辨识方法可以有效地辨识出鼓风机用表贴式PMSM的定子电阻和定子电感;同时无位置传感器算法估计的永磁体磁链误差小,鼓风机在给定转速下运行平稳。因此,本方案具有一定的实用性。
猜你喜欢
微特电机(2021年1期)2021-01-25 03:23:14
防爆电机(2020年5期)2020-12-14 07:03:52
仪表技术与传感器(2020年5期)2020-06-11 07:01:10
大电机技术(2018年4期)2018-09-26 03:11:30
汽车维护与修理(2016年10期)2016-07-10 08:17:41
电测与仪表(2016年10期)2016-04-12 00:26:38
电工技术学报(2015年6期)2015-11-15 09:18:10
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
汽车维护与修理(2015年7期)2015-02-28 12:18:09
现代冶金(2015年4期)2015-02-06 01:55:56