基于影像去噪和增强实现数字影像预处理的应用研究
2021-12-22 10:08:28徐兴慧
科海故事博览 2021年35期
徐兴慧
(中友四达(北京)科技有限公司,北京 100086)
1 基础原理与详细方式
1.1 影响去噪分析
滤波的另一种叫法是数字影像去噪,其主要目的是高效限制与处理噪声,且确保图像边缘信息、细节及其优良视觉呈现成效,同时是图像预处置行业与目的获取行业中的重点探究课题。通常状况下,对于不同情况的含噪图像采取的去噪方式也不尽相同。双边滤波计算方法具有构造简便、繁杂度较低、非常容易达成等特性,尤其是滤除图像中的随机噪声,能最大程度的留存图像本身数据,防止增添滤波失真。双边滤波算是一种非线性滤波计算方法,其特点主要是在平滑滤波的同时考虑了像素间的几何距离和色彩距离,可以定义为:

当中像素范围是p,而像素点之间欧式距离为‖p-q‖,其两像素灰度差为Ip-Iq,而显示几何相邻联系空间滤波函数为S,显示灰度类似联系灰像素波函数为G,归一化系数则为Kp。通过物理推理获知,当S达成距离中心像素较近时数值提升,相反则值下降;G达成窗口内像素和中心像素差值变小时数值会增大,相反则数值降低。一般选择高斯函数当作空间与灰度滤波函数。
1.2 加强图像
其具体指可实现特定使用要求的目标,突显图片中重点区域的数据,消除其他数据对于不一样使用而产生的异常图像解析辨别预处置,主要目的是替换原图片数据使其更符合人机识别的系统。加强图像有下述目的:首先,完善图像视觉成效,提升图像单个分清晰度与对比度,加强图像辨识度;其次,加强图片部分特性使图像更方便计算机处置,提升计算机处置速率。
加强图像的具体方式有空域加强与频域加强。其中空域加强则是在像素构成空间直接针对像素实施处置,具体的数学表现公式为:g(x,y)=EH(f(x,y)),其f(x,y),g(x,y)表示为图像空域加强前后图像,E为图像加强操控方式。此外,频域加强是通过某种方式把空间的图像替换至其他空间当中,随后借助图像改变空间特性来进行处置,随后再逆变至原始空间当中。其具体数学展示公式为:G(u,v)=F(u,v)H(u,v),g(x,y)=f(x,y)*h(x,y),其在)算中等同于在)间域实施卷积计算,其G,F)H分别为函数g(x,y),f(x,y)与h(x,y)的傅里叶替换,H(u,v)又被叫做滤波器函数。
2 具体实验比较解析
2.1 双边滤波去噪
采取双边滤波算法对干扰数据去噪的双边滤波特性进行考量,可以采用融合图像空间相邻于像素值类似的折中滤波处置方式,考量的空域信息与灰度类似,从而达到了保边消噪的目的,呈现出简便、非迭代、局部等特性。大部分人采取改变保边双边滤波器处置光学影像来减少噪声,加强了建筑物边缘对比度的预处置,获得了良好成效。随后通过具体实验比对,针对原始影像数据与双边滤波数据统计解析之后,三波段都有偏差,信比为SNR:0,峰值信比为PSNR:36.4294,其结构相似性量度为SSIM:0.986915。上述标准数据获得的双边滤波算法不但确保了原始图像大部分细节数据,而且还实现了影响消除噪声任务。
2.2 影响加强处置
针对影响实施加强处置问题,则需要更好的提升不同地物间的对比度,便于实施后续处置。所采取的影响加强方式为:先进行色彩系统替换,具体是将RCGB色彩空间替换至NTSC色彩空间,毕竟NTSC与RGB为不一样色彩空间,而NTSC可阐述的色彩更为丰富,RGB包含在NTSC色域和RG色域里,基本只有NTSC的72%。替换至NTSC空间后,针对影像实施对比度非线性拉伸处置,随后再替换至RGB空间。此外,图像实施色域替换采用NTSC空间实施对比度拉伸处置,其成效更为明显。对原先影响数据与加强处置影响数据实施统计解析,发现信噪比SNR、峰值信噪比PSNR及其结构相似性量度SSIM三波段均有偏差。通过上述标准能够得出:经过图像加强处置后,图像中的地物相互对比度有所提升,且同种地物内部构造平稳,处置成效显著[1]。
2.3 小波去噪与模糊熵基本理论分析
2.3.1 小波去噪解析
到九十年代小波变换才逐渐被融入到影像高级处置行业,其重点则是把影响处置方式由常规塔式计算变换为多尺度解析,部分呈现出的信号分解空间是互相独立的,同时利用逆变换能够复原之前信号,在分解重建之中不会形成信息损失与冗余。
通过达成对数替换来实现图像小波替换,推断获取的HL、LH、HH三个高频图像为被噪声污染或者边缘数据,最后要对污染数值实施整理。在对HL、LH、HH不同高频位置图像实施整理的过程中,筛选阈值T为3倍的delta,当delta实施一级小波解析时获得了高频图像方差。随后高频部分图像像素值也没有映射至[0,255]区间,此时高频部分图像的各像素值有零有整、有正有负,如果像素值绝对数据大于或等于T,则需要划归修正区,相反则划分为抑制区。最后,将小波反替换,从而达成图像的重建[2]。
2.3.2 糊熵理论
熵在信息探讨中适用在表达概率与信息冗余度之间的联系,其重点阐述高绿模糊难题,需要把熵概念值入模糊集理论当中,并对某个模糊集的模糊性程度大小实施阐述。
2.3.3 依据模糊最大熵的红外图像增强
首先,针对一副大小是M*N的灰度图像,其X为像素点灰度值,图像灰度矩阵经过隶属度函数模糊化变成了模糊数矩阵,空域信号处置也替换成了模糊域。其在多种隶属函数中线性函数计算速率明显强于非线性函数,利用下述运算模糊隶属度随后使用改变的S函数对获得的隶属度实施极强处置:
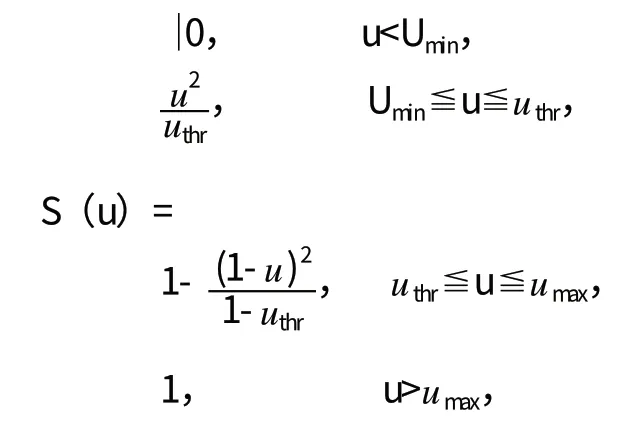
当中Umin,umax,uthr分别是红外图像像素灰度矩阵当中的最小值、最大值及其目标和背景区域最佳分界点隶属度。目标和背景理想分界点的获取方法为I=log(I)=log(R)=log(F)=R+F。因此,经过改变的S函数加强计算,一是可以把红外图像隶属度区域从原先的[Umin,umax]拉长到[0,1],改变了动态范畴,二是经过非线性替换可以对[0,uthr][uthr,1]区域中的隶属度大小实施压缩与加强。最终,利用下述公式通过加强处置后,将模数域分布恢复到空域信号,计算公式为:

其次,最大模糊熵准则求取阈值。如何依据改变的S函数加强计算来获取目标和背景最佳分界点变成了主要难题。通过前述的最大模糊熵可得出:在红外图像当中,目的与背景二者间的过渡灰度达成最理想划分时,模糊熵将会获得最大数值,因此可以使用模糊最大熵原则来获取分解阈值。当图像灰度取值范畴为[xmin,xmax]而图像论域Ω 的灰度空间创建模糊集为:目标类:O:O={U0(X)}│x∈Ω};背景类:B:B={Ub(X)}│x∈Ω}。在图像内部,不同物体像素值各有期望值,即为此类像素值的恢复均值,其隶属类灰度均值隶属度最大,类别中全部像素隶属度和灰度与全部类平均灰度间距成反比,同时需大于1/2,分开利用上述公式核算目标类与背景类隶属度函数:

当中m1(T)与m2(T)分开是目标类和背景类平均灰度数值。

假设获得红外图像当中目标类与背景类最佳阈值T完成二者精准划分,需采取图像模糊熵完成最大值,通过下述公式核算最大模糊熵:

3 总结
总而言之,文章通过数字影响消噪与增强为重点探究对象,全方位阐述了借助双边滤波与小波去噪,利用空域加强与频域加强两种方式对数字图像进行加强。通过验证表明,文章所使用方式对数字影像噪音限制与去除、图像中兴趣点加强与获取比较实用,高效提升了数字影响判断获取成效,进一步获得了原影像数据预处置,从而为将来的后续工程奠定了良好的基础。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
军民两用技术与产品(2021年10期)2021-03-16 06:05:22
中国资源综合利用(2017年4期)2018-01-22 02:46:40
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年1期)2016-11-07 09:01:59
西南交通大学学报(2016年4期)2016-06-15 20:29:36
浙江大学学报(工学版)(2016年9期)2016-06-05 09:20:57
海峡科技与产业(2016年3期)2016-05-17 04:32:11
中国农业文摘-农业工程(2016年5期)2016-04-12 05:38:14