
激光三维雷达扫描在房地一体中的应用探讨
2021-12-20 09:59强亚明
西部资源 2021年4期
强亚明
摘要:我国空间信息数据较多,因此采集、处理过程相对复杂,采用激光三维雷达装置进行对地扫描操作,可有效观测房地一体状态,更好测得待测房屋的三维空间信息,提高扫描精度。本文对激光三维雷达的扫描技术加以分析,通过原理、特点等因素进一步深度了解该技术,并结合现实项目案例,对房地一体中该技术的应用流程进行探讨。
关键词:房地一体;激光三维雷达;坐标信息获取
1.引言
房地一体工程中应将地上建筑如房屋等构筑物,进行精准测量,以此获取坐标信息,为后续建设项目提供基础数据依据。传统房地一体的测量采取人工配合测绘仪器的方式完成,该过程耗时耗力,不利于测量效率,现阶段采用激光三维雷达对待测区域内的房屋地理信息做出勘测,能精准描绘出周边地形地貌,突出区域特征,并在立体点云数据库中进行数据信息处理,以此达成房地一体勘测工程目的。
2.激光三维雷达扫描技术
2.1技术原理
激光三维雷达系统内包含了激光测距仪和高精度的惯性测量仪器,另外该系统运作时结合了GPS技术,提高定位能力,该系统整合激光、计算机科学以及测量、定位技术,高度集中作用下,为房地一体勘测提供了高精度的扫描办法。激光雷达系统采用激光扫描设备,将房地目标进行激光扫描,由此得出两者间的实测空间距离,同时使用差分接收机,获取激光发射位置的瞬时性空间坐标。另外使用惯性测量单元对飞行平台姿态角进行获取,得出仰俯角度、侧滚角度和偏航角度,充分利用以上数据,便可准确得到地物的地理空间信息、边角长度信息,最终建立三维坐标系,用坐标数据表示地物表面位置信息。
2.2技术特点
使用激光三维雷达的扫描技术,可在其运行中、数据结论等环节下归纳出四个技术特点。第一,该技术可实现非接触的测量方式,因为使用激光雷达装置,并不需要反射棱镜做以位置信息的定位支持,技术可直接作用于待测地物表面,由此采集到精準的三维数据信息。第二,数据采样比例较高,使用传统空地一体勘测技术,多为人力与测绘仪器相配合的方法,导致测量中的采样点数据较少,并不能最为精准得出测量数据,而雷达扫描可将测量区域内的众多采样点属于同时采样,提高采样率。第三,该技术主动状态下发射扫描光源,并可通过自身的激光发射频率,判断回波信息反馈中的地物三维坐标信息。第四,该技术拥有较高分辨率,能够针对目标物的点位数据,做出高精度数据的判断。
3.房地一体应用中的分析
3.1应用流程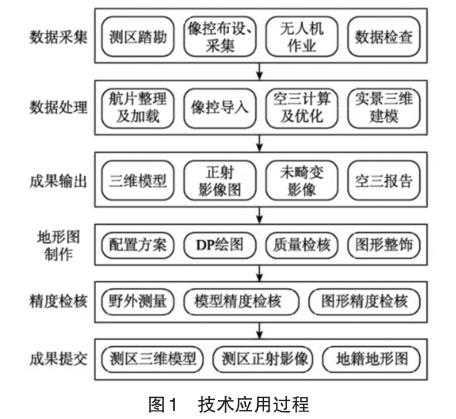
在激光三维雷达扫描技术的房地一体应用下,可对整个应用过程做出详细分析,如图1所示,以此将该应用完善落实至待测目标建筑的地理信息获取过程中。首先需要对待测区域内进行人工踏勘,并在合理位置布置像控,确保采集数据点位较为完整;其次对数据做出处理,应将航片进行妥善整理,并导入像控,进行空三计算,持续优化数据,建立出三维实景模型;接着将模型输出,并获取正射影像图,得出完整数据信息下的空三报告;然后制作地形图,并合理制订配置方案,采用DP绘图方式,进行地形图的质量核验,对图形做以一定整饰,提供清晰的观赏图形;核验雷达扫描技术的精度,经由野外测量与模型精度两种检核方式的交叉核验,完成对图形精度的分析;最终提交该技术的成果,包括有三维模型、正射影像,以及房地一体勘测项目的精准地形图[1]。
3.2项目背景
选择我国某自然村进行房地一体测量项目,该项目得出的数据将用于整合建库,留存当地土地资源。项目的外业修补工程,需测绘出近4万宗地,精度要求为5cm。施测过程中,因待测房屋较为分散且周边植被茂密,使用传统测量方法将不能获取精准数据,所以使用激光三维雷达测量方式,可在该房地一体项目中取得达到精准度要求的测量数据结果。在空旷区域内,采用飞机搭载模式做好点云数据的相关收集工作,并选取该区域内已知坐标位置的点位,其上搭建静态基站,进行后差分的处理分析。
3.3设备选择
该待测区域的房地环境较为复杂,地势起伏的地表结构基础上,零散分布着待测房屋,且居住居民较多、地物遮掩情况较严重,因此选择使用相应的设备,能提高测量精度,满足项目要求。该案例项目中选取直升机作为设备载体,人为操控飞机运行,飞机上搭载有激光三维雷达的系统,型制为AS-900,其中该系统内将卫星定位设备(型制GNSS)、惯性测量设备(型制IMU)、激光扫描设备进行集成,并设置中心控制单元,保障测量精度可在数码相机的150m范围内达到5cm。该系统将回波功能加以应用,可有效穿透植被干扰,降低遮掩物体带来的测量影响,另外系统搭载了自主研发的立体测图软件,提高绘图效率,经实测,效率可达传统效率8倍以上。
3.4数据的采集及处理
结合项目精度需求,根据现场环境的影响,选择基准站点进行测量作业,由此采集激光雷达技术下的测量数据。勘察现场的范围、地貌、交通情况等,是影响到雷达扫描的重要因素,因此选择单种房地一体测量方式,其得出数据符合精度要求的难度较大,采用多种作业结合的测量方式可有效提高数据的准确性。
背包作业的模式可获取更多有用的地物信息,但地面GPS装置的信号较易受到干扰,所以应采用地面布控方式,提高信号的正确获取率,以此增加点云数据的精确性。在一定条件下,对点云位置进行纠正,降低错误位置信号对该项目数据精准性的影响,从而获得更高精度下的激光点云位置信息数据。
采集数据过程中使用无人机作业模式,能有效规避GPS或卫星信号受干扰的情况,但是飞行相对航高,测区地形地貌及航线规划等因素对成图精度产生较大的影响,在实际作业过程中,要根据设备和地形地貌情况进行较为精确的参数计算和分析。同时地面静态基站测量要同步进行,因而需要综合考虑静态基站数据质量,坐标转换精度以及高程拟合精度等[2]。
数据采集完成后,便可获得原始基站数据、原始GPS数据和原始点云数据,首先通过基站数据和GPS数据进行惯导解算,获得采集轨迹数据,以此获取测区的激光点云无缝拼接数据。对数据进行分析,并做出预处理方案,可有效优化数据,促进三维坐标的准确建立,提高项目建设效率。
激光雷达点云数据解算输出后,还需要根据项目需求对点云数据坐标系统进行转换。在输出点云时,在initial explorer里设置好投影参数,通过转换参数获得所需的投影坐标系统下的点云数据。获取点云数据后,对坐标数据进行分析,可判断出地面目标物的地理信息状态,包括边长信息、形状信息等。
4.扫描技术试验数据分析
对该项目技术做出试验数据分析,首先应判断技术数据的获取模式,当测量区域位置处于房屋及电线密集区时,可采用背包作业模式,而在较为空旷的区域时,则采用无人机搭载模式进行点云数据采集。在测区附近选取一个坐标的已知点,在该点上架设静态基站,并带入点云数据进行后差分处理。在采集过程中尽量匀速步行,尽可能避免急拐弯以及快速掉头导致惯导记录错误而造成测量误差,图2为测区范围和背包作業轨迹。
当数据采集完成,则需对地面结构部署检查点,为确保数据准确,检查点应选择在点云测量中具备较高辨识度、清晰度的地物目标物角点,可有效提高数据精度。当激光点云数据得出后,使用地面上搭设的静态基站,进行后差分技术的运用,经解算后推导出点云数据,将该数据统一命名,格式后缀为Las。当点云数据软件选择了原有检查点进行位置分析,该布设位置上推导出相应的云坐标,再利用该坐标与RTK检查点的坐标以对比,由此得出检校点、测量点等点位的精度数据,还可得出实测数据与图解数据的误差分析,将激光点云技术的相对精度以数据展示。
从精度的统计数据中可知,激光雷达点云的数据,可将点位误差降至0.054m左右,最大的残差误差数据也不超过0.063m,因此能够充分满足房地一体中的测量精度要求。其中要求规定,明显界址位置的检查点位置精度要达到5cm、隐蔽界址位置精度为7.5cm,相对精度要求为10cm,而该项目中误差平均为0.064m,所以也可满足相对精度要求[3]。
5.结语
综上,激光三维雷达可全天候运作,将地面三维数据进行较高精准度下的获取,因此在房地一体的勘测项目中,被良好应用,具备现实应用价值。通过对激光雷达的测量应用分析,得出点云精度与观测数据的实际效果,首先当没有GPS给予精准定位情况下,惯导系统的定位效果并不理想,而激光的反射作用将会影响点云精度,造成数据浮动现象;其次采用激光雷达进行户外作业,提高项目成图率,并且测定精度可满足空地一体的实测要求。需注意的是在地物遮挡情况严重时,采用其他工作方式来配合该区域下的探测,保障空地一体的点云数据精度维持较高水平。
参考文献:
[1]张力元,张法星,蔡爱玲,等;三维激光雷达扫描技术在河流模拟中的应用[J].水电能源科学, 2020, 38(08):121-124.
[2]舒斯红.移动式激光雷达在房地一体测量中的应用[J].资源信息与工程, 2018, 33(05):119-121.
[3]张美娜,吕晓兰,邱威等;基于三维激光点云的靶标叶面积密度计算方法[J].农业机械学报, 2017, 48(11):172-178.
