工业机器人传感器技术综述
2021-12-20 06:39邢国芬
中国设备工程 2021年22期
邢国芬
(天津石油职业技术学院,天津 301607)
当今世界各国都在大力发展工业4.0,以促进制造业的转型升级。其目标是借助物联网、数字信息技术和计算机技术,实现制造过程的智能化、柔性化和个性化,其中发展、利用工业机器人是重要方向。近年,工业机器人代替人力进行很多重复性和复杂性高的工作,促进了工业的进步,也减轻了工人繁重的重复劳动。近年来,新兴技术如新型传感器、新的信息技术纷纷得到突破,工业机器人技术也突飞猛进。现代化的工业机器人可以实现多种功能,比如复杂的焊接、材料运输、装配、机械加工等制造环节。工业机器人从传感器获取的外界信息,可以帮助工业机器人判断自身状态和外界环境,进而帮助其控制和调节动作,完成指定的任务。本文回顾了近年来的文献,对各种传感器进行总结。
1 工业机器人常用传感器
各种传感器相当于工业机器人的手、眼、耳和鼻,有助于识别自身的运动状态和环境状况。在这些信息的帮助下,控制器可以发出相应的指令,使机器人完成所需的动作。如下为各种传感器介绍(表1)。
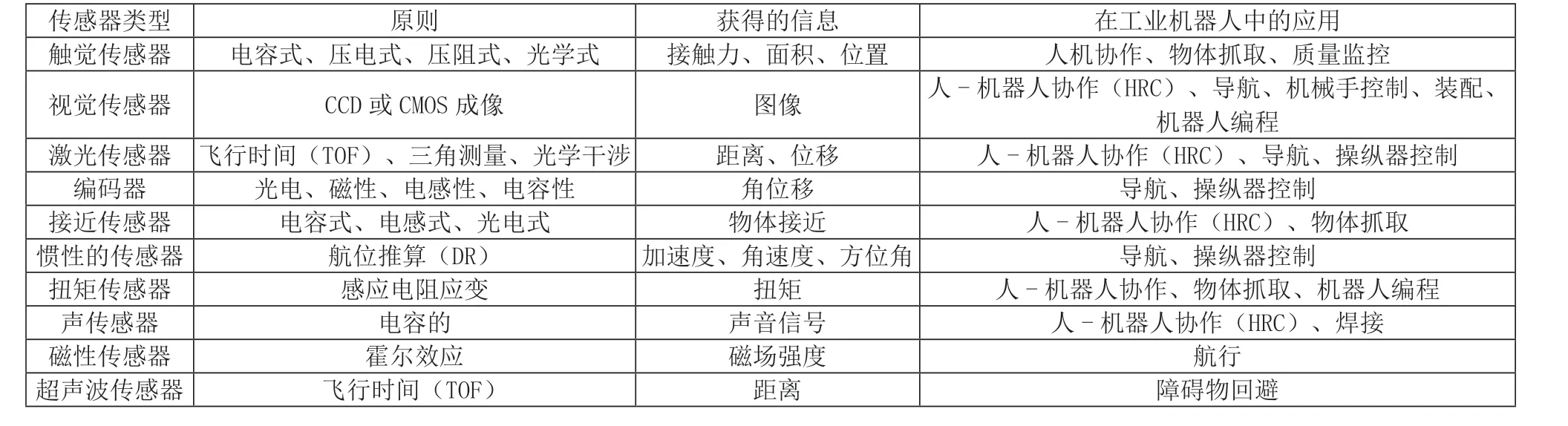
表1 传感器的简要概述
1.1 视觉传感器
视觉传感技术近年来发展较快。目前在三维重建、人脸识别、多机联合等领域应用已经非常成熟。视觉传感器采集的图像由处理器进行处理,提取出对特定任务有用的信息。
视觉传感器主要包括各种摄像机,比如RGB摄像机、多光谱摄像机和深度摄像机。摄像机中的光敏元件通常是CCD或者CMOS,都是利用光电效应原理,将光信息转换成电信号,继而转换为数字信号。不同类型的摄像机有不同的原理,可以提供不同的信息。RGB相机是人们日常生活中使用最多的一种相机,其原理是通过红、绿、蓝3种颜色及其组合来获取各种可见颜色。多光谱相机能够获取不同波段的图像,包括可见光和不可见光波长,因此可以获得一些RGB相机无法提供的信息。深度相机则将距离信息加入到了二维图像中,实现了立体成像。
视觉传感器因其成本低、信息丰富、使用方便等优点而广受欢迎。然而,视觉传感器的数据处理是复杂和耗时的。虽然许多研究者提出了几种算法,但其适用性和灵活性还不是很令人满意。
1.2 触觉传感器
触觉传感器和人类通过触觉感知一样,工业机器人也需要触觉来对环境进行感知。因此,触觉传感器就成为了工业机器人智能化的必备元件,它使工业机器人具备了靠触觉来感知的能力。
根据原理不同,触觉传感器主要有4种方式。压电式、压阻式、电容式和光学原理式。压电触觉传感器是基于压电效应原理,即在外界力的作用下,压电材料表面因形变会产生电压。它的频率响应好,测量范围大,但分辨率不是很理想。压阻式触觉传感器基于压阻效应原理,即施加外力时会产生自身电阻的变化。它测量范围大,鲁棒性好,但是迟滞效应较大。电容式触觉传感器利用电容的变化来测量接触力。其空间分辨率高,功耗低,但抗干扰能力差。光学原理的触觉传感器靠检测光的参数变化间接感知外界的接触信息。优点是抗干扰能力强,具有很高的空间分辨率。
虽然触觉传感器越来越受到较多关注和研究,但其多功能性和适应性等性能目前还不尽如人意。它们的发展依赖于各种技术领域的进步,如材料、电子学、相关算法等。要达到等同于人类触觉感知的水平,还需要更深入的研究。
1.3 激光传感器
激光发明于20世纪,因为其在单色性、方向性和亮度方面都有出色的性能,因此被广泛应用于各种场合。
激光传感器主要由测量电路、激光器和光电探测器等组成。激光器分为四类:固体、液体、气体和半导体。激光传感器主要用于对距离、速度和振动等物理参数的测量上。常见的有激光测距仪、激光位移传感器、激光扫描仪、激光跟踪器等。激光测距的基本原理主要包括三种:飞行时间(TOF)、三角测量法和光学干涉法。TOF是指从发射激光到接收到反射光的总时间。在激光测距仪中,由于光速太高,测距精度取决于飞行时间的测量精度上。三角剖分法利用三角形理论和三角函数来计算物体之间的距离。激光位移传感器就是基于这种方法来实现短距离测量的。两束相位不同的光束叠加后形成明暗条纹的现象被称为光的干涉。此原理被用于激光跟踪器中,可以测量装有反射镜的目标的移动距离。
激光传感器能够遥感测量,测量速度和精度都令人满意。但是,激光波长容易受温度、大气压力和空气湿度变化的影响。当上述参数发生变化时,需要进行补偿才能达到更高精度测量。
1.4 编码器
编码器将角位移或角速度转换为电脉冲或数字量。
编码器根据检测原理可分为:光电式、磁性、电感式和电容式。光电式编码器是其中最常用的。将光信号转变为电信号。根据码盘的校准方式,光电编码器分为增量式和绝对式。增量式光电编码器的输出是一系列方波脉冲。旋转角度可以通过记录脉冲的数量计算出来。但是需要一个参考位置作为转轴的零点绝对位置。绝对式光电编码器轴上的每个位置都对应有唯一的二进制数字量,因此可以直接得到绝对位置。
编码器因其结构紧凑、使用寿命长、使用方便、技术成熟等优点而被广泛应用。编码器的分辨率取决于圆中编码盘上刻线的数量。更多的线能够识别较小的角度,从而产生更高的分辨率,当然成本也会更高。
2 其他传感器
除上述4种传感器外,工业机器人中还部署了一些传感器来实现多种功能,如接近传感器、惯性传感器、扭矩传感器、声传感器、磁传感器、超声波传感器等。
接近传感器能够检测到物体是否接近,并输出相应的开关信号。根据操作原理可分为电容式、电感式和光电式。电容式接近传感器利用检测电极的电容变化引起的电路状态变化来感知接近的物体。感应式接近传感器是基于电磁感应原理。它们的传感元件是检测线圈,当金属物体靠近时,其电感量会发生变化。光电接近传感器通常由发光二极管和光电探测器件组成。当物体接近时,光电二极管发出的光被反射到光电探测器件上,通过检测电路产生相应输出信号。
惯性传感器包括加速度计、陀螺仪和磁强计。惯性传感器被广泛用于测量运动物体的运动参数,比如加速度、角速度和方位角。通常,三者的组合被称为惯性测量单元(IMU)。惯性传感器的测量原理是航位推算(DR)。利用积分的方法来计算物体的运动量。惯性传感器的精度在短时间内是令人满意的,但是长时间漂移误差较大。
扭矩传感器主要用于测量施加在机械轴上的扭矩。常见的类型有感应式和电阻应变式。其结构通常由扭力杆和线圈、电阻应变片等检测元件组成。通过检测元件参数的变化,将扭矩引起的扭杆扭转变形转化为电信号,实现扭矩测量。
声波传感器能够把声波转换成电信号。其中装有电容驻极体传声器,声波会引起传声器中驻极体膜的振动,产生微弱的电压变化。然后对电压进行后续处理。
磁传感器主要用于检测磁场强度。其原理是霍尔效应。霍尔效应是指当电流流过导体时,会产生一个垂直于磁场和电流方向的电场,从而在导体表面产生电位差的现象。
超声波传感器常用于探测障碍物。根据从发射超声波到探测回波的时间来估计物体的范围。
3 结语
本文综述了近年来工业机器人中常用的传感器及其具体应用。工业机器人的发展将有助于实现更加灵活、精确和个性化的工业制造。然而,工业机器人发展中的一个重要挑战是开发性能更好的传感器,以改善其对外界环境和自身状态的精确感知,这有赖于多学科技术的发展和融合。此外,还需要对传感器获取的信息处理算法进行优化,以提高处理速度和精度。
猜你喜欢
海外星云(2021年6期)2021-10-14
电子制作(2019年10期)2019-06-17
成都信息工程大学学报(2018年3期)2018-08-29
传感器与微系统(2018年7期)2018-08-29
传感器与微系统(2018年7期)2018-08-29
特别健康(2018年3期)2018-07-04
制造技术与机床(2017年7期)2018-01-19
工业设计(2016年4期)2016-05-04
工业设计(2016年10期)2016-04-16
电子器件(2015年5期)2015-12-29