一种输电杆塔总体倾斜角度检测装置的设计与实现
2021-12-15 00:40:26松吕玉祥
传感技术学报 2021年10期
陈 松吕玉祥
(太原理工大学物理与光电工程学院,太原030024)
随着国民经济的快速发展,电力作为国民经济的现代基础产业也得到了快速发展,高压输电杆塔作为输电线路的重要组成部分,它的安全性是电力系统的安全运行和经济运行的重要保证,也是保障居民用电安全的重要因素[1-2]。输电杆塔不可避免的会建设在采空区、山坡和河床等地质灾害区域,从而导致输电杆塔的倾斜、变形甚至倒塌,造成重大经济损失,严重影响人们的正常生活[3-5]。
目前测量输电杆塔的倾斜度比较传统的方法是通过铅锤法、经纬仪测量法、平面镜法、地面激光雷达测量法[6-7]。文献[8]通过在在输电杆塔上加装MIMU测量单元采集杆塔运动的加速度和角速度信息,利用四元数姿态解算方法检测杆塔的倾斜程度[8]。文献[9-10]都是利用在输电杆塔横担上加装倾角传感器,前者结合ZigBee技术和GSM技术建立杆塔在线检测及预警系统[9],后者用远程CORS服务技术,GPS载波相位差分技术,监测输电杆塔姿态[10]。以上文献中通过在输电杆塔塔体上加装传感器建立杆塔模型,获取塔体数据,无法准确全面的反应杆塔的姿态状况。文献[11]通过无人机航拍获取杆塔图像,通过对图像进行处理提取杆塔主要轮廓,建立杆塔模型,获取杆塔中轴,计算杆塔倾角[11],其缺陷在于无人机航拍在极端气候条件下对图像的获取比较困难且误差较大。
本文采用ARM微处理器作为主控单元,通过激光测距模块和倾角传感模块采集杆塔数据,通过无线传输模块发送至上位机进行数据解算,建立杆塔模型,计算杆塔基座中心坐标,通过对基座三维坐标的重建,利用罗德里格矩阵[12-14]计算出杆塔的总体倾角。本文实验表明,该方法能够更准确、全面、直观的反应输电杆塔的倾斜状况。
1 整体设计方案
1.1 输电杆塔倾角检测装置整体构成
本检测装置利用在二维旋转云台上搭建测量控制系统,控制系统主要由主控芯片、激光测距模块、姿态传感模块、无线传感模块、上位机解算中心组成。主控芯片利用激光测距模块采集测距模块到输电杆塔基座中心的距离,利用姿态传感器采集二维云台此刻的姿态角(偏航角和俯仰角),无线传输模块将此刻的距离数据和姿态角数据发送至上位机解算中心,上位机解算中心建立三维坐标模型和杆塔倾斜模型解算杆塔倾角。输电杆塔倾斜角度检测装置拓扑图如图1所示。

图1 输电杆塔倾斜角度检测装置拓扑图
1.2 输电杆塔倾角检测装置检测流程
如图1所示,首先先对三脚架进行调平,通过遥控器控制二维云台上下左右旋转使激光依次打到塔腿和输电杆塔基座中心的连接点A、B、C、D点的位置,进行四次距离数据和姿态角数据的获取,获取完A、B、C、D四点状态后,通过按键控制无线传输发送一次数据至上位机解算中心,在上位机显示界面中可直观显示输电杆塔的角度与姿态。
2 输电杆塔倾角检测装置设计原理
输电杆塔倾角检测装置的实现原理是通过采集到的距离数据和姿态角数据抽象出输电杆塔基座三维坐标模型和基于罗德里格矩阵的杆塔倾斜模型。
2.1 基座三维坐标模型的建立
本文以二维云台为原点建立空间直角坐标系(oxyz),利用激光测距模块获取的距离数据,姿态模块获取的倾角数据来解算杆塔基座中心的三维坐标。
本问题可抽象为如图2所示的数学模型,设O点为坐标原点,A、B、C、D为输电杆塔基座中心的4个待测量点。我们以A点为例,OA的距离为L1,α为直线OA与x轴的夹角(即云台的偏航角),β为直线OA与平面xoy的夹角(即云台的俯仰角),根据距离和夹角解算基座中心A点的三维坐标。
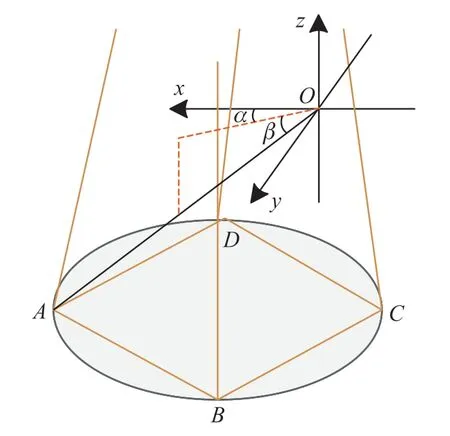
图2 基座坐标计算数学模型图
设O点坐标为(0,0,0),A点坐标为(x1,y1,z1)则x1,y1,z1可表示为式(1):
式中:α,β,L1均为已知参数,且L1满足式(2)

B、C、D点坐标也可通过式(1)解算出。
2.2 罗德里格矩阵旋转的基本原理
罗德里格矩阵是三维空间中计算一个向量绕旋转轴旋转给定角度得到新向量的公式,公式的基本定义如下:
K和V为两个三维列向量:

向量V绕向量K旋转θ角度后得到Vrot,则Vrot可表示为:

式中:R表示如下:

2.3 杆塔倾斜模型的建立
杆塔倾斜模型的建立基于2.1章节中杆塔基座三维坐标的获取,通过基座的三维坐标建立杆塔模型提取输电杆塔的中轴(即四个基座坐标构成平面的法向量)依据法向量解算出杆塔顺线路方向和垂直线路方向的夹角(即绕x轴y轴的旋转角度)。
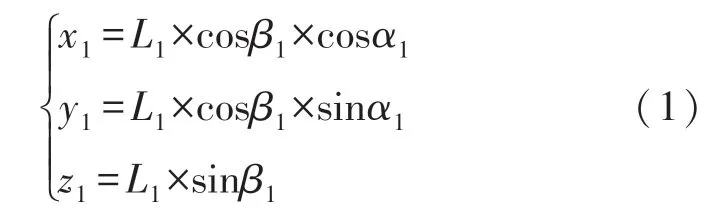
图3为输电杆塔倾角解算的数学模型,A、B、C、D为四个基座的坐标四点共面且坐标分别为(x1,y1,z1),(x2,y2,z2),
(x3,y3,z3),(x4,y4,z4),向量MF为平面ABCD的法向量(即倾斜后的杆塔中轴),向量ME为平面xoy的法向量(即倾斜前的杆塔中轴),向量MF由ME先绕x轴旋转ψ角度得到MH,再绕y轴旋转φ角度。则角度ψ和φ为杆塔两个方向的总体倾斜角度。杆塔倾斜的数学模型如图3所示。
图3 杆塔倾斜的数学模型
令:

设平面ABCD的法向量为Vnor,

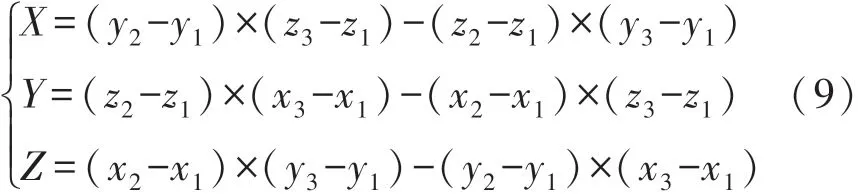
则法向量Vnor中X,Y,Z满足式(9)
将向量ME设为P=(0 0 1)T,向量MF为q。根据罗德里格旋转矩阵则有下式(10)所示:

式中:定义逆着x轴方向观测。绕x轴顺时针旋转为正向,逆时针旋转为反向。旋转角度为ψ;逆着y轴方向观测。绕y轴顺时针旋转为正向,逆时针旋转为反向,旋转角度为φ。
向量ME绕x轴旋转ψ角度的旋转矩阵如式(11)所示:
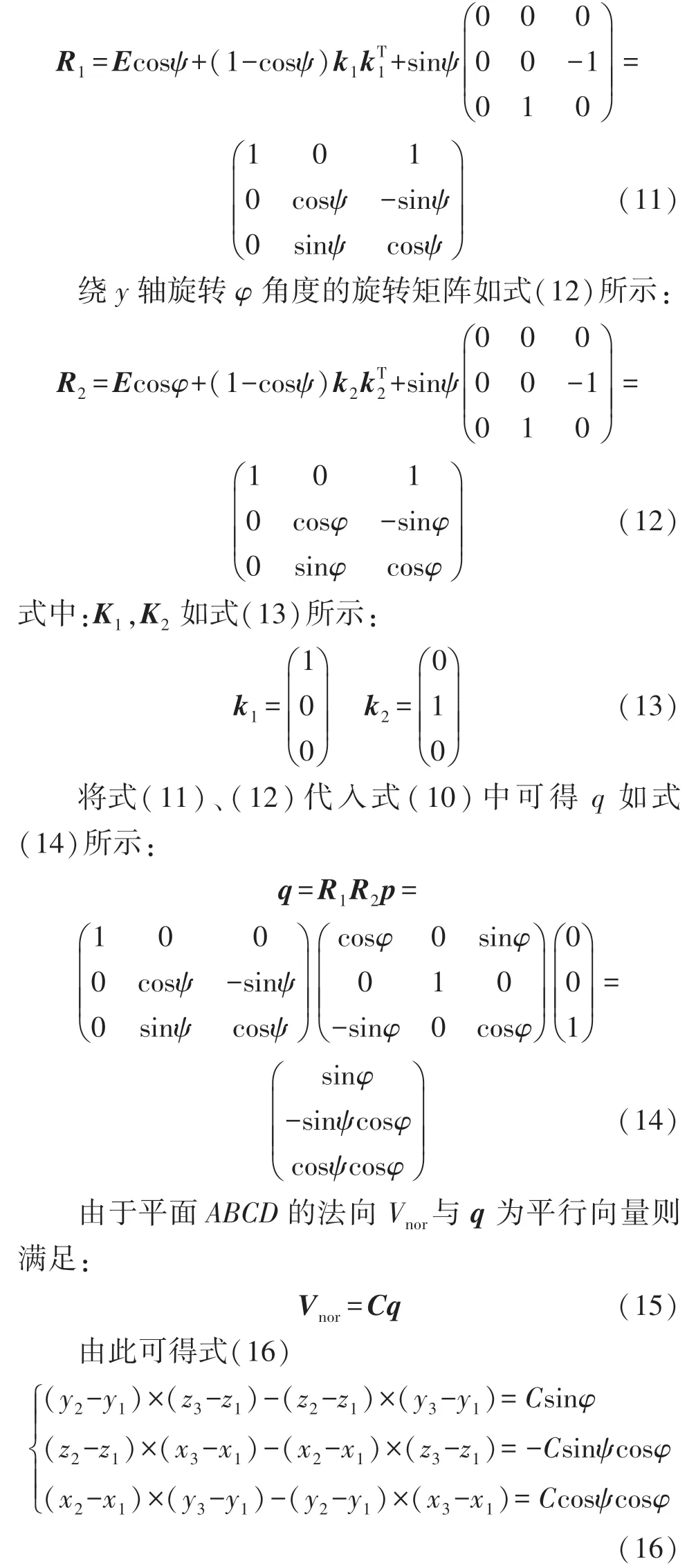
根据式(16)方程可求出角度ψ和φ,这两个角度即为输电杆塔沿x轴和y轴方向的倾斜角度。
3 输电杆塔倾角检测装置系统实现
3.1 系统硬件总体设计
输电杆塔倾角检测装置的硬件电路主要包括电源电路、信号处理电路、激光测距控制电路、姿态传感控制电路、无线传感电路,该检测装置主控芯片选用增强型基于ARM Cortex-M3内核的微控制器STM32F103C8T6作为终端核心处理芯片,
实现信号的采集处理以及所有外设的控制。系统硬件结构框图如图4所示。

图4 系统硬件结构框图
3.2 激光测距电路
本文倾角检测装置选择KLH-01T激光测距模块,可直接与单片机进行通信,实时读取测距仪与被测物之间的距离值。实物图如图5所示,性能参数如表1所示。
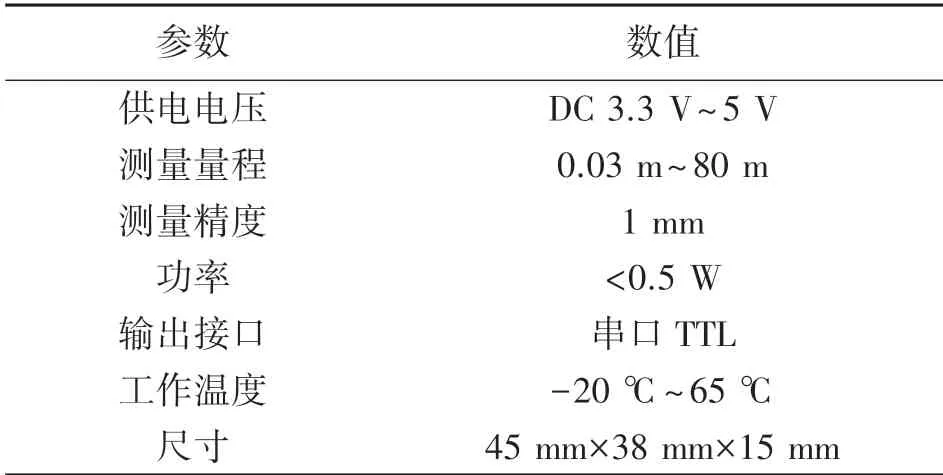
表1 激光测距模块技术指标

图5 激光测距模块实物图
激光测距模块供电为直流3.3 V到5 V,输出为数字信号,与STM32F103C8T6的串口2相连接,即测距模块的RX端接单片机串口2的TX端(PA2管脚),测距模块TX端接单片串口2的RX端(PA3管脚)。工作原理为单片机给激光测距传感器发送特定指令,可调整传感器地址、测量量程、测量频率、分辨率、测量模式(单次测量或者连续测量)、开始测量和终止测量等。配置好激光测距传感器以后,传感器会回传测距模块和被测物之间的距离值。
3.2 姿态传感控制电路
本文中用到两块姿态传感模块,主要用于俯仰角和偏航角的测量,选用维特智能科技开发的六轴传感器模块JY61传感器,JY61内部集成了3轴陀螺仪、3轴加速度计。采用高性能的微处理器运用卡尔曼滤波算法将采集到的姿态数据进行数据融合,准确输出当前传感器的姿态,实物图如图6所示,技术指标如表2所示。
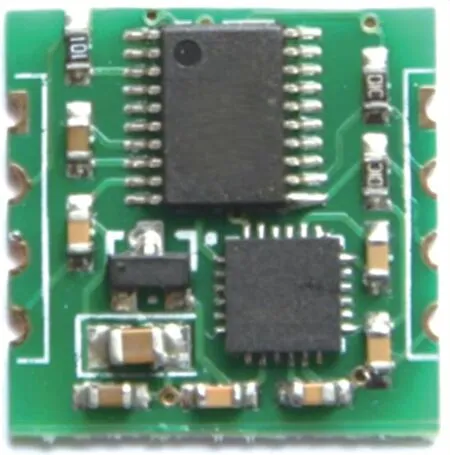
图6 JY61实物图

表2 姿态传感器技术指标
JY61输出接口有串口和IIC两种,本课题中使用的是串口,与STM32F103C8T6的串口1相连,串口可直接输出角度值,避免了DMP库进行数据融合,能够有效降低开发难度。其通讯接口原理图如图7所示,在硬件连接完成以后,六轴传感器不断向单片机发送姿态数据,单片机在进行简单的帧解析后得到所需姿态角了。

图7 JY61通讯接口原理图
4 软件设计
4.1 倾角检测装置软件设计
本系统软件部分主要用于数据的采集和发送,主控制器通过程序指令控制不同模块在不同时间段完成不同的任务。如信号的采集、数据的传输、上位机交互等。软件程序流程图如图8所示。

图8 检测系统软件流程图
4.2 上位机软件设计
上位机软件使用Unity3D进行三维的可视化处理,使用C#语言进行编程,有串口通讯接口,其中:波特率设为9 600、1个起始位、8个数据位、1个停止位、无校验位、无硬件流控制。通过基座三维坐标和姿态角数据解算建立杆塔的倾斜模型,上位机界面如图9所示。
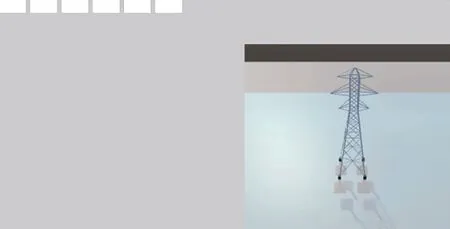
图9 系统上位机显示界面
5 实验设计与分析
通过在实验室搭建如图10所示的实验平台,通过水平仪对试验台进行标定,设定此高压模型直线塔顺线路方向的倾斜角度为15°,横向倾角为10°,通过本文1.2节中的整体测量流程对杆塔倾斜模型进行了15次测量实验,实验数据如表3所示。

图10 实验测试平台
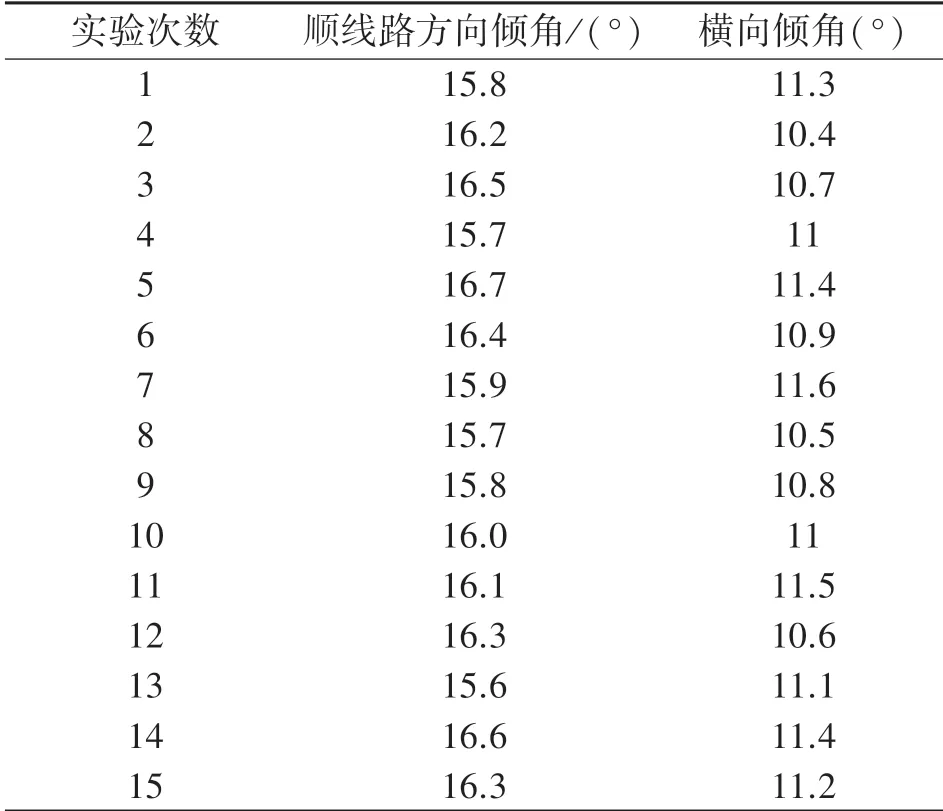
表3 实验测量数据
通过实验数据对输电杆塔倾角检测装置不确定进行分析,本文采用A类评定对不确定度进行量化计算,计算公式如下式所示:

式中:UA为标准不确定度,S(x)为样本标准差,n为实验次数,定义UA1、UA2分别为顺线路方向和横向方向的不确定度,由此可计算出UA1、UA2如下所示:

根据实验结果可得知,本文所设计的装置在测量杆塔两个方向倾斜角度的绝对精度平均值分别为1.11°和1.03°,相对误差分别为7.3%和10%,完全能够满足杆塔角度测量需求。
6 结论
通过设计硬件电路系统搭建激光测距模块,姿态传感模块采集数据,建立输电杆塔整体的数学倾斜模型。通过基于罗德里格旋转矩阵的倾斜测量模型的建立得出杆塔整体的倾斜角度。通过实验数据分析本文所设计的测量系统满足了测量精度需求,实现了对输电杆塔整体倾斜状态的测量,更全面、完整的反应杆塔的健康状况。实验结果表明:该检测装置可以准确测量输电杆塔的倾斜状态,并及时发出预警,保证电网的稳定运行。
猜你喜欢
卫星应用(2022年1期)2022-03-09 06:22:30
防爆电机(2021年2期)2021-06-09 08:14:48
模具制造(2019年7期)2019-09-25 07:30:00
船舶标准化工程师(2019年4期)2019-07-24 07:21:16
电子制作(2019年11期)2019-07-04 00:34:36
测控技术(2018年6期)2018-11-25 09:50:24
通信电源技术(2018年5期)2018-08-23 01:16:04
制导与引信(2017年3期)2017-11-02 05:17:00
电测与仪表(2016年23期)2016-04-12 00:23:14
振动、测试与诊断(2014年4期)2014-03-01 01:14:08