
航空发动机外形点云的保特征去噪方法
2021-12-15 05:19:00闫杰琼周来水胡少乾文思扬
中国机械工程 2021年23期
闫杰琼 周来水 胡少乾 文思扬
南京航空航天大学机电学院,南京,210016
0 引言
我国航空发动机的设计制造还不能完全满足国产飞机的生产需求,目前国产飞机还存在较多使用外购发动机的情况。我国的飞机设计制造已全面采用三维数字化技术,而外购发动机只有实物及安装尺寸等信息,没有发动机的三维数字化模型,这给飞机与发动机的装配协调设计带来较大困难,因此,飞机设计部门对快速重构航空发动机的外形几何模型、为飞机设计提供航空发动机的数字化协调样机提出了迫切的需求。
通过三维激光扫描设备获取的点云数据受设备精度、环境光线、被测物体表面材质等因素的影响,不可避免地带有噪声。航空发动机外形点云可大致分为机匣装配体和管路系统两部分,包含机匣壳体、管路、凸台、加强筋、成附件、卡箍等结构特征,它们分别起承力、包容、连接、密封和固定作用。这些结构特征形状复杂,现有去噪方法会不同程度地模糊或破坏掉这些结构的尖锐特征(加强筋的尖锐棱边)、薄壁特征(前后安装边和纵向安装边的薄壁结构)和细节形状特征(凸台、全岛、半岛、沉槽和螺栓),会直接影响最终发动机外形几何模型的重建精度,因此需要研究一种点云保特征去噪方法,在去除噪声的同时,尽可能保护上述结构的各种几何特征,为后续重建提供高质量点云。
现有的保特征去噪方法可分为以下五类。
(1)基于双边滤波的去噪方法。这类方法[1-5]有一定的保特征效果,但双边滤波因子依赖于局部邻域信息,容易出现平滑区域过度光顺的问题,面对大尺度噪声时,这类方法的错误判断会丢失特征点。
(2)基于表面重建的去噪方法。这类方法的原理是先拟合点云数据生成局部平面,然后再将周围的测量点投影到局部平面上。移动最小二乘拟合法(MLS)[6]、鲁棒移动最小二乘拟合法(RMLS)[7]和隐式移动最小二乘拟合法(IMLS)[8]对小尺度噪声的鲁棒性较好,有一定的保特征能力,但不能很好地处理离群点,且处理高曲率或低采样率的区域时容易出错。为解决上述问题,鲁棒隐式移动最小二乘拟合法(RIMLS)[9]在投影前先对法向量场进行双边滤波,可以在一定程度上保持特征,但是该方法容易将特征另一侧的点当作离群点处理。代数点集曲面(APSS)方法[10]采用代数球面拟合局部区域进行投影实现去噪,但原始模型的细节特征会失真。
(3)基于粒子的去噪方法。这类方法的原理是从点云中选择一部分点成为粒子,通过改变粒子的位置,逼近真实的底层表面来达到去噪效果。局部最优投影(LOP)[11]、权重局部最优投影(WLOP)[12]、各向异性权重局部最优投影(AWLOP)[13]和连续局部最优投影(CLOP)[14]可以在一定程度上保持尖锐特征,但当输入点云的噪声尺度比较大时会出现过度尖锐的问题,输入点云相对稀疏时也很难有好的表现。
(4)基于特征的去噪方法。前三类方法在不同特征区域很难自适应调整输入参数,容易引起特征过度光顺或过度尖锐。基于特征的去噪方法[3,15-17]提出要先对特征区域与非特征区域进行分类识别,然后分别采用不同的滤波方法对点云数据进行去噪,缺陷是时间成本较高。林洪彬等[18-19]根据点云的局部分布特性自适应地调整了滤波主方向和各主方向的衰减速度,可以在一定程度上保持原始模型的尖锐特征,但依旧需要用户指定三个参数,未能实现全自动。
(5)基于学习的去噪方法。现有的保特征去噪方法对复杂点云进行处理时,通过反复试验也很难确定一组可以在去除噪声和保留特征之间达到平衡的输入参数。为了解决过度光顺和反复调参的问题,研究人员将目光转向在图像去噪[20-23]和网格去噪[24-25]中应用得非常好的基于学习的去噪方法。在PointNet[26]基础上,RAKOTOSAONA等[27]提出了直接应用于点云的噪声点去除和离群点判断的PointCleanNet,网络完成训练之后,不需要参数调整即可直接应用于测试集中各种尺度、各种形状的噪声点云,相比于传统方法,去噪效果得到了改善。
针对航空发动机外形点云结构特征多、形状不规则、分布无规律、尺寸差异大、细节丰富等特点,提出了一种基于深度学习的点云保特征去噪方法,可以在去除噪声的同时保护加强筋、凸肩和机匣壳体的尖锐棱边,保留安装边的薄壁结构,并且从噪声数据中恢复出形状、大小、位置准确的凸台,有利于后续重建出准确的发动机外形几何模型。
1 外形点云的保特征去噪方法

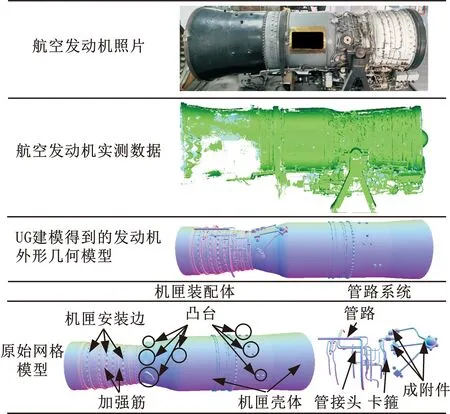
图1 航空发动机外形结构特征Fig.1 Structural features of aero-engine profile
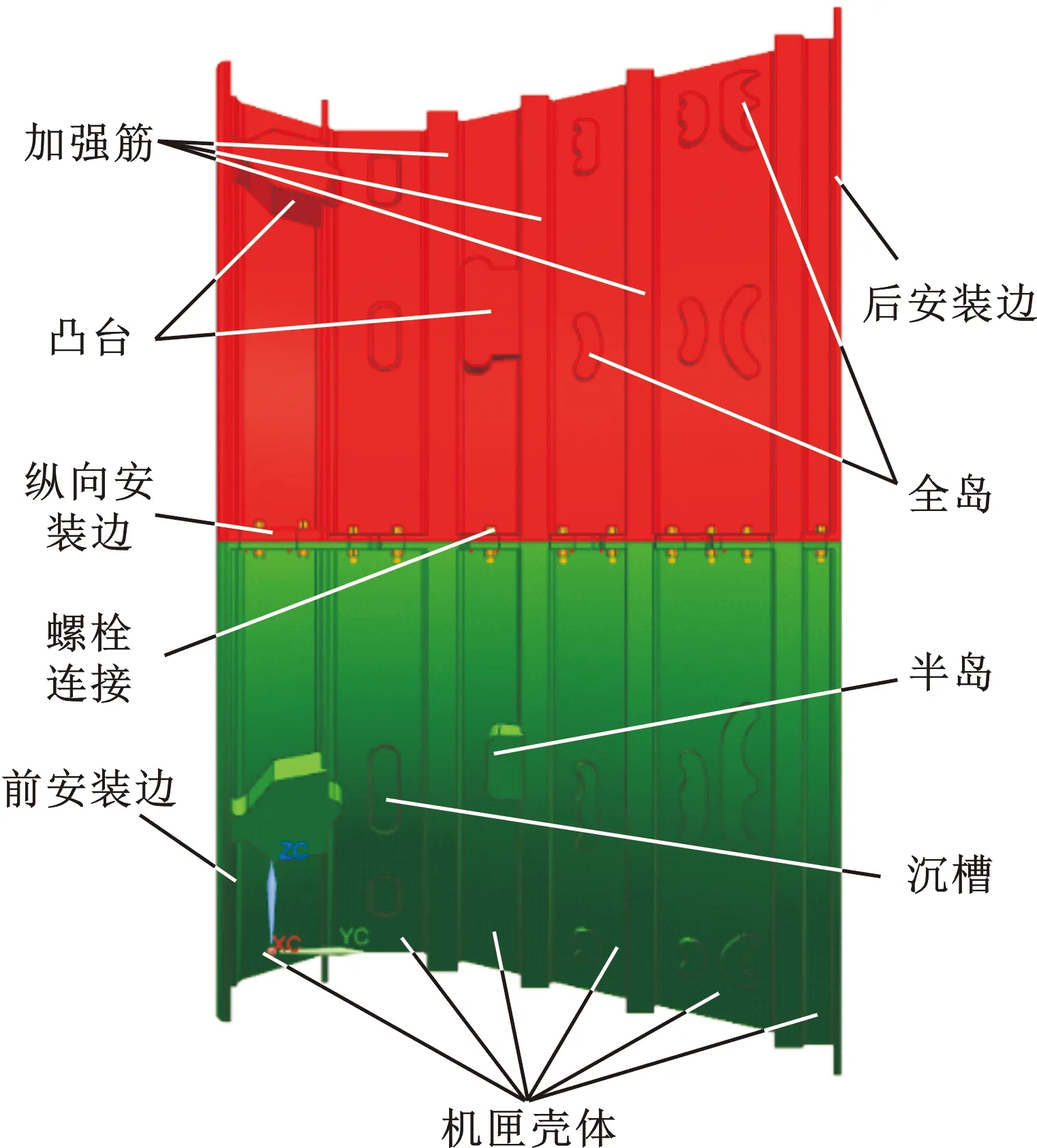
图2 航空发动机机匣结构特征Fig.2 Structural features of aero-engine casing
1.1 保特征去噪模型
航空发动机外形点云的特征分割方法(下称“特征分割方法”)已经将X′分为特征噪声点集P′与非特征噪声点集Q′,即
(1)

(2)
(3)
基于深度学习的保特征去噪方法通过设计两种不同的去噪网络,定义了两种非线性函数g和h,用来预测特征和非特征噪声patch中心的位置修正向量,将噪声patch中心向模型真实底层表面移动,即
(4)
(5)
(6)
特征分割方法对噪声尺度为0.005b的发动机外形点云的分割结果如表1所示。相比于形状规则简单的机匣壳体、加强筋、安装边和管路,凸台、岛屿、螺栓、成附件、管接头和卡箍等结构包含了丰富的细节形状。前者被识别为非特征数据,后者被识别为特征数据,分割精度达到了93.42%,实现了高精度语义分割。
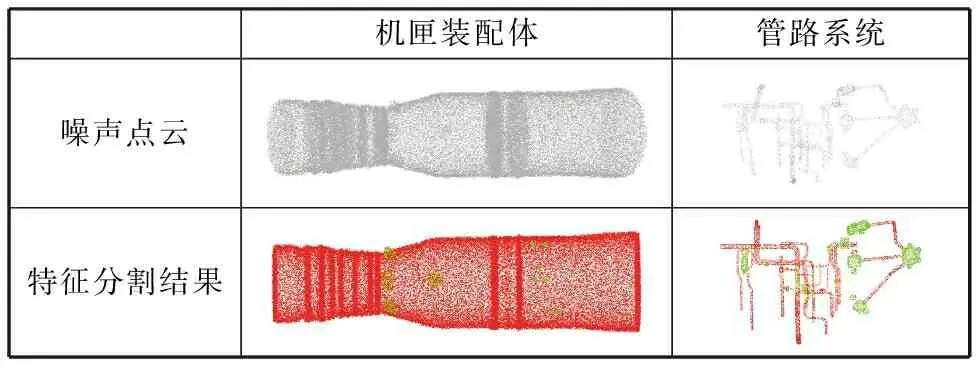
表1 航空发动机外形点云的特征分割结果
选择patch作去噪网络的输入而不是整体点云的原因如下:一方面整体点云更适合对象分类和模型分割任务,通过从整体点云中抽象出一个全局特征向量来预测每个点属于不同类别或者不同数据块的概率,预测噪声点向着模型表面移动的位置修正向量很大程度上依赖于局部范围内的形状信息;另一方面处理整体点云是非常有挑战性的,整体点云之间的形状差异要远远高于patch之间的形状差异,处理整体点云不仅需要更多的训练数据和更强的网络计算能力,而且在处理高密度点云时还会导致高内存复杂性。
从整体点云中选择patch中心,采用IFPS方法的原因是IFPS相比随机采样可以更好地表示整个点云的分布情况(表2),即使选择的采样点个数只是整体点云个数的2.5%,也足够表达该模型的大体形状,并且与原始点云的密度分布是一致的,随机采样会造成采样点局部黏结。

表2 IFPS与随机采样对比
1.2 保特征去噪流程
特征去噪网络和非特征去噪网络的训练过程如图3、图4所示,保特征去噪方法如图5所示,可以看出,基于深度学习的保特征去噪方法的两个重要组成部分是保特征去噪网络和保特征去噪数据集,其实质是一个先训练再求解的过程。具体步骤如下:
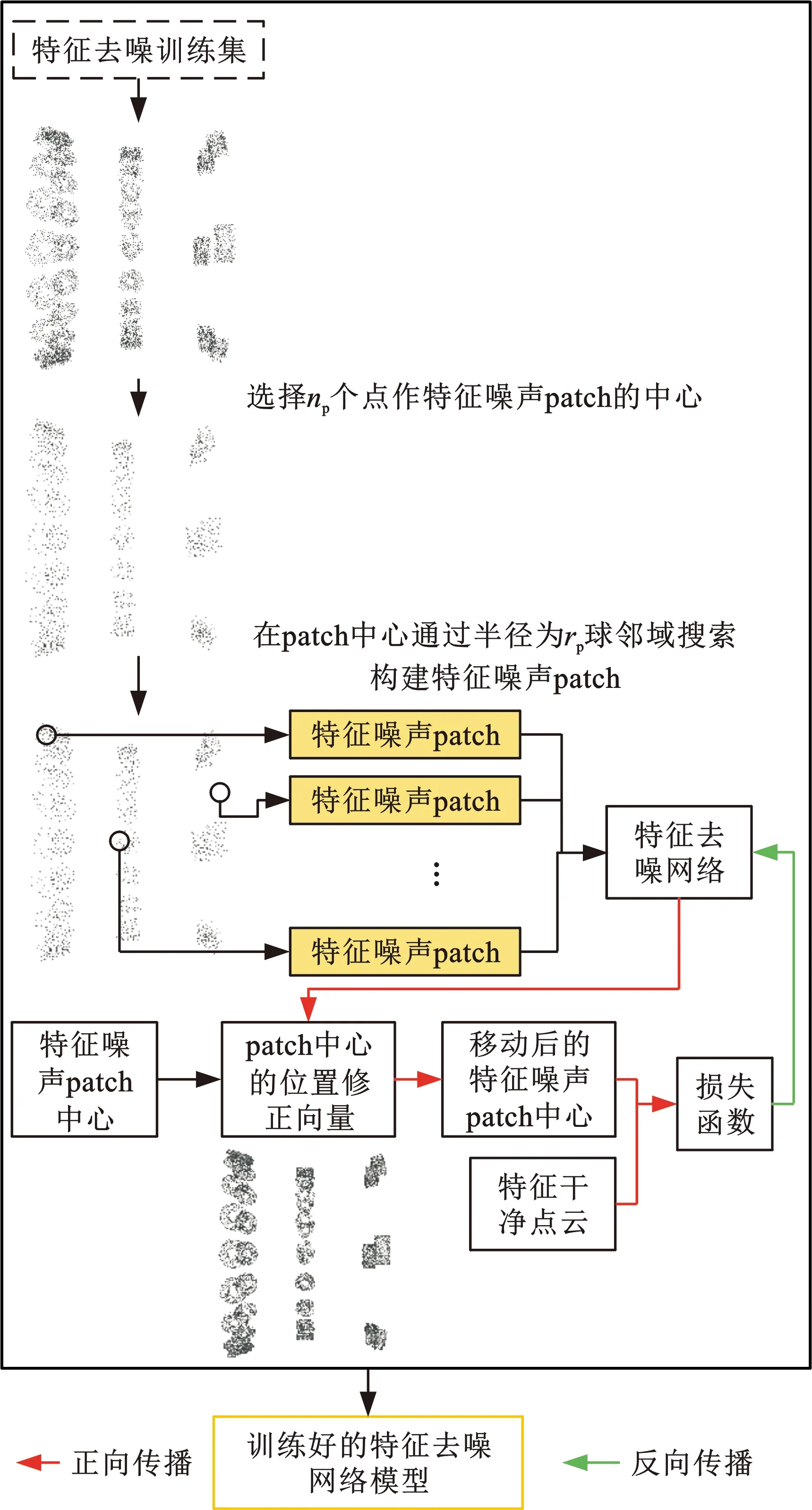
图3 特征去噪网 络的训练过程Fig.3 The training process of feature denoising network
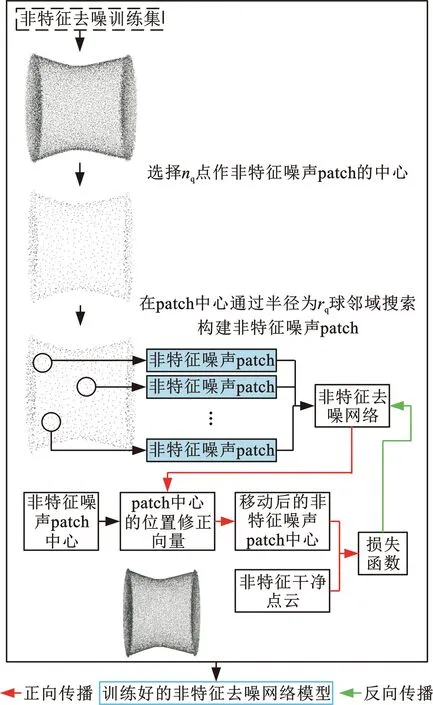
图4 非特征去噪网络的训练过程Fig.4 The training process of non-feature denoising network
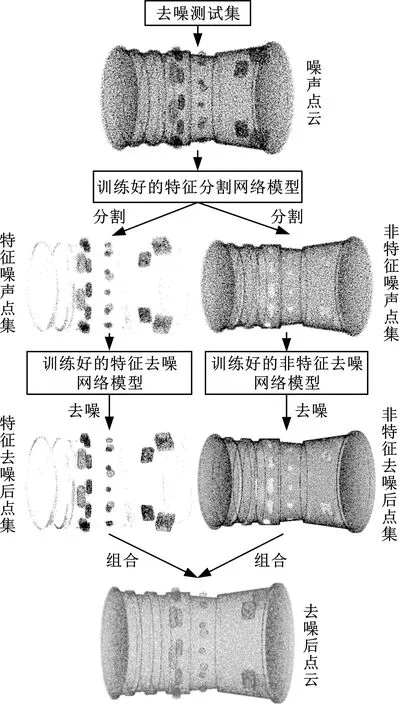
图5 保特征去噪方法Fig.5 Feature-preserving denoising method
(1)从特征去噪训练集和非特征去噪训练集中各自选择一个整体点云,分别构建特征噪声patch和非特征噪声patch,作为两种去噪网络的输入;
(2)去噪网络综合从patch中收集到的形状信息,预测噪声patch中心的位置修正向量;
(3)噪声patch中心沿着网络预测的位置修正向量移动;
(4)利用损失函数统计移动后的噪声patch中心逼近模型真实底层表面的程度,将误差反向传播给去噪网络;
(5)重复步骤(1)~步骤(4),观察损失函数的收敛情况,当误差不再减小时,训练完毕;
(6)从去噪测试集中选择发动机外形噪声点云,利用训练好的特征分割网络模型将其分为特征噪声点集和非特征噪声点集;
(7)分别输入训练好的特征去噪网络模型和非特征去噪网络模型,每个点都作一次patch中心,即可得到特征去噪后点集和非特征去噪后点集;
(8)组合上述两种点集即可获得发动机外形去噪后点云。
2 外形点云的保特征去噪网络
如图6所示,选择B个patch中心,组成mini-batch作为去噪网络的输入。每种去噪网络都有其对应的局部邻域编码器,用于将局部表面片中包含的形状信息抽象成特征向量,要求是可以充分捕捉各种形状的细节特征,捕捉到的形状信息越接近真实模型表面,去噪效果越好。添加的跳跃连接的多层感知机被命名为基础特征提取器BasicBlock,添加跳跃连接有助于梯度传播和提高训练模型的性能。两种不同的回归器用来预测噪声patch中心的位置修正向量。

图6 保特征去噪网络Fig.6 Feature-preserving denoising network
2.1 非特征邻域编码器
如图7所示,航空发动机机匣是环状回转壳体类零件,被特征分割方法提取出的机匣壳体、加强筋和安装边结构一般是圆柱面或圆锥面,不包含复杂的细节特征。加强筋和安装边附近,形状复杂的凸台和岛屿特征被移除,构建非特征噪声patch时,局部邻域内的点是具有相同形状特点的,基于此非特征去噪网络可以更加准确地预测出噪声patch中心的位置修正向量,达到保护安装边薄壁结构和加强筋尖锐棱边的目的。

(a) 机匣整体网格模型 (b) 分割后机匣非特征的网格模型
如图8所示,非特征邻域编码器先通过一种被限定为旋转的空间转换网络(quaternion spatial transformer network,QSTN)生成一个B×3×3的旋转矩阵(图9),从而将B个patch旋转至规范位置。去噪网络的预测结果也需经过这个旋转变换的逆变换,再应用于非特征噪声patch中心。然后通过两层基础特征提取器BasicBlock将经过QSTN变换后的特征向量B×3×kq抽象至64维特征空间,得到中间特征向量B×64×kq。在此基础上,直接用三层BasicBlock将中间特征向量抽象至1024维特征空间,最大池化出高级特征向量B×1024×1,并作为包含非特征噪声patch全部形状信息的特征向量,递送给非特征patch回归器。

图8 非特征邻域编码器Fig.8 Non-feature neighborhood encoder
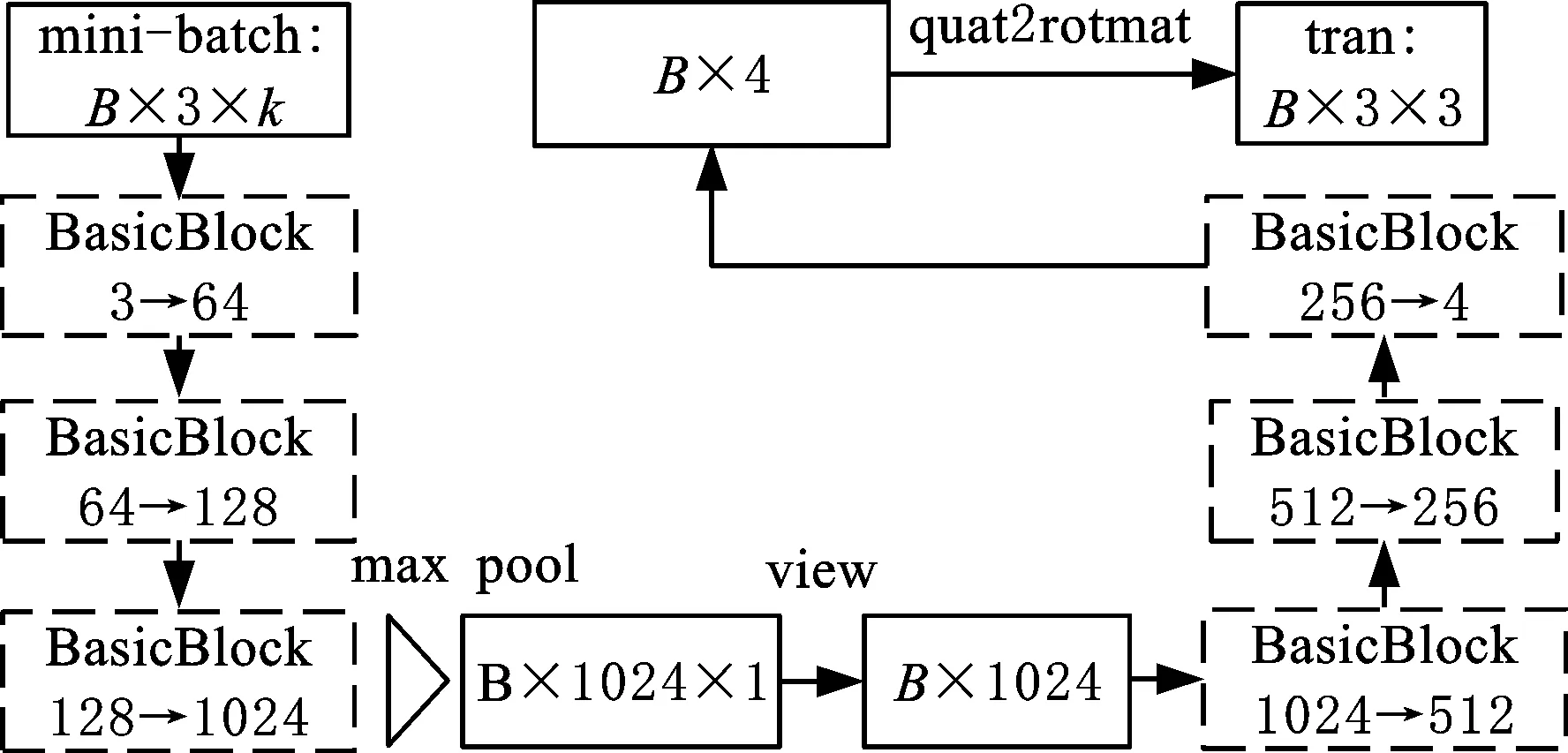
图9 QSTN网络结构Fig.9 QSTN network structure
相比PointCleanNet的邻域编码器,非特征邻域编码器移除了特征旋转模块STN,经过对比发现这有利于提高训练速度和降低模型复杂度,同时去噪效果也不会受太大影响。
2.2 特征邻域编码器
为了在去噪过程中更好地保护甚至恢复形状复杂、细节丰富的发动机凸台、岛屿、螺栓、成附件和卡箍等结构特征,特征邻域编码器(图10)分别将中间特征向量抽象至不同维度(128、256、1024)的特征空间,并且最大池化最后3层Basic-Block的输出,可以获得低级特征向量B×128×1、中级特征向量B×256×1和高级特征向量B×1024×1,这些特征可以理解为表达细节形状的关键点,越底层的特征越贴近模型表面,越能表达真实的细节形状。
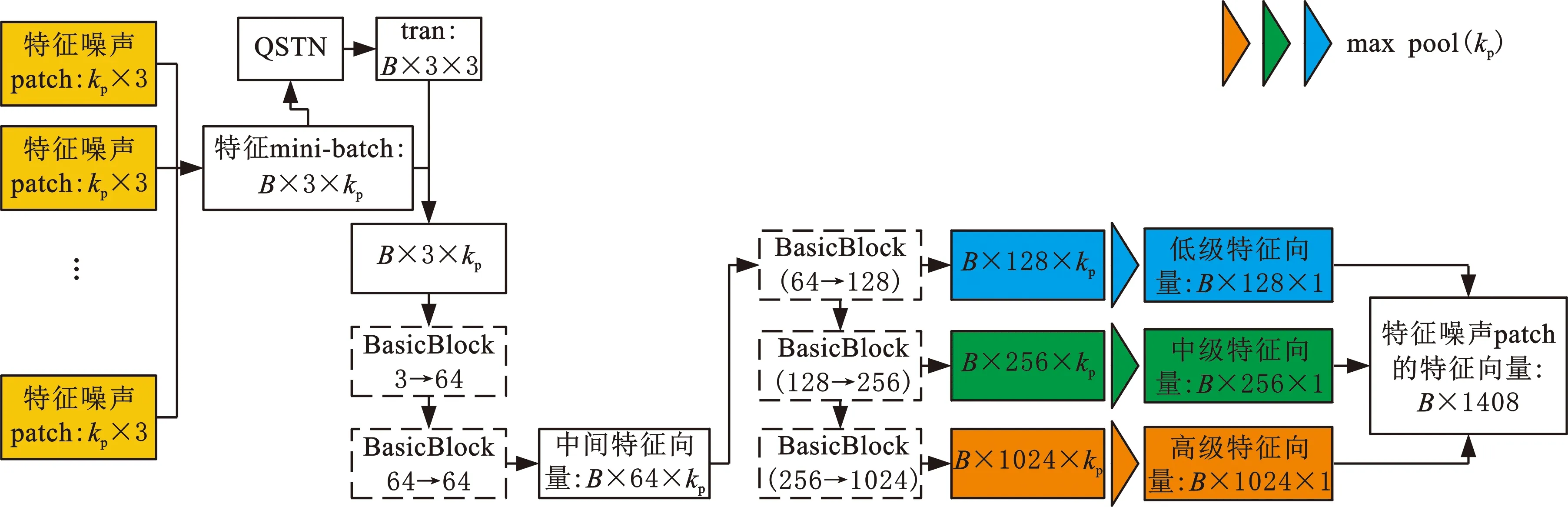
图10 特征邻域编码器Fig.10 Feature neighborhood encoder
将上述特征向量合并,生成包含特征噪声patch全部形状信息的特征向量B×1024,并递送给特征patch回归器,它同时包含了低级、中级和高级特征信息,有助于提高特征噪声patch中心位置修正向量的预测准确性,改善细节特征处的去噪效果。
3 外形点云的保特征去噪数据集
航空发动机外形点云的保特征去噪数据集包括:基础去噪训练集、特征去噪训练集、非特征去噪训练集以及保特征去噪验证集和测试集。这些数据集分别用于训练过程的两个阶段:第一阶段采用基础去噪训练集,培养网络的整体去噪能力;第二阶段重点培养去噪网络对发动机外形几何特征的保护能力,两种网络分别在特征去噪训练集和非特征去噪训练集上进行学习。在整个训练过程中都采用保特征去噪验证集和测试集对模型的学习程度进行判断,决定是否终止学习。
如图11~图14所示,从每个形状的网格模型中随机采样10 000个点,作为干净点云。通过给干净点云中每个点设置四种尺度(0.005b、0.01b、0.015b、0.02b)的位移向量来生成噪声点云。

图11 基础去噪训练集Fig.11 Basic denoising training set

图12 特征去噪训练集Fig.12 Feature denoising training set
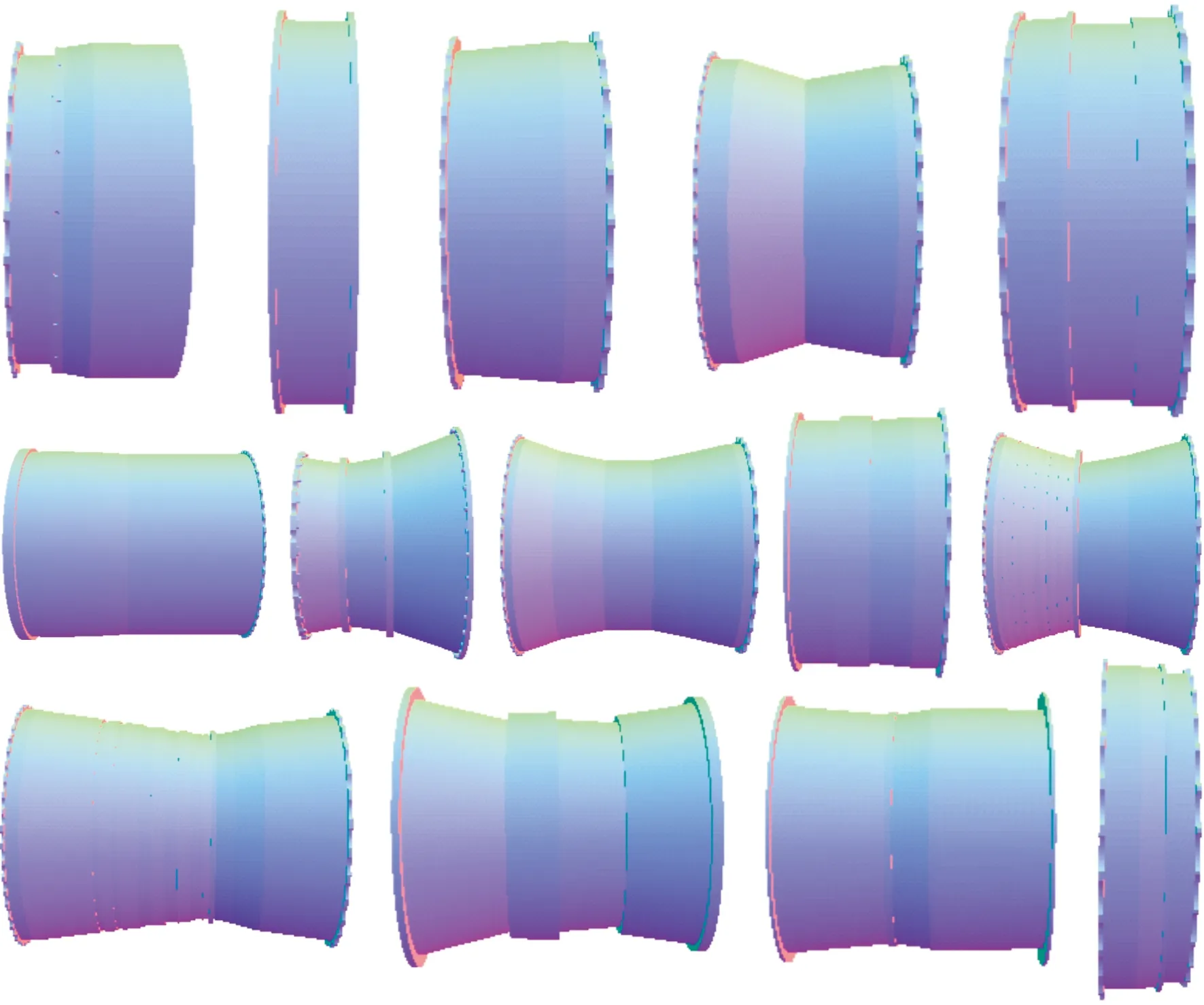
图13 非特征去噪训练集Fig.13 Non-feature denoising training set

(a) 保特征去噪验证集
为了提高保特征去噪网络在实测数据上的适应能力,需要向去噪训练集中添加缺失和分布不均匀等缺陷。本文采用以下方式进行添加:①添加缺失缺陷。从每个形状的整体点云中随机选择一部分点作中心,将其0.01b半径范围内的点删除。②添加分布不均匀缺陷。不同形状的模型体积相差很大,当采样相同数据点时,它们相互之间的数据密度是不同的,将两个数据密度不同的模型装配成一个模型,就构建了数据分布不均匀缺陷。
4 外形点云保特征去噪方法的实施细节
4.1 去噪损失函数
在训练过程中,损失函数通过统计移动后的噪声patch中心逼近模型真实底层表面的程度来引导网络学习。从网格模型中获取采样点成为干净点云X,它同时具有两项去噪后点云被期望的属性,即足够接近模型表面和均匀分布。
(7)
(8)
(9)
式中,Lloss为移动后噪声patch中心逼近模型真实底层表面的程度;β为权重参数。
4.2 迭代去噪
通过实验发现,将采用深度学习计算点云的位置修正向量用于去噪后仍然存在残留噪声。残留噪声与原噪声相比,类型相同但尺度更小,因此可以采取迭代去噪的方法进一步逼近干净点云。如图15、图16所示,采用不同噪声尺度的模型进行迭代去噪时,随着迭代次数不断增加,残留噪声的尺度越来越小,在迭代到第三次以后,模型噪声尺度趋于稳定。

(a) 原始模型 (b) 干净点云 (c) 0.005b噪声点云

图16 残留噪声与迭代次数关系图Fig.16 The relationship between residual noise and the number of iterations
噪声点云经过迭代后,模型会出现收缩现象。参考TAUBIN[28]提出的方法,噪声patch中心的位置修正向量为
(10)

5 保特征去噪方法的验证与分析
为验证保特征去噪方法的有效性和优越性,定义了定量评估准则,并且进行了以下验证实验:本文方法与PointCleanNet去噪结果的定性对比、定量对比、训练时间对比和测试时间对比。定性对比主要观察几何特征保护的效果,定量对比可评估两种方法的去噪能力。
2.1节和2.2节具体说明了本文方法中包含的非特征邻域编码器(图8)和特征邻域编码器(图10)相比PointCleanNet(图17)的创新。
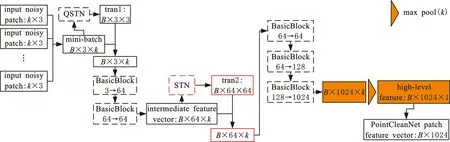
图17 PointCleanNet的局部邻域编码器Fig.17 PointCleanNet local neighborhood encoder

(11)
(12)
(13)

5.1 与PointCleanNet的定性对比
将本文方法与PointCleanNet应用于航空发动机机匣噪声点云,结果如表3所示。对比去噪前后的点云发现,本文方法相比PointCleanNet有更好的几何特征保护能力,主要表现在对凸台的整体形状保护和细节特征保护,安装边薄壁结构的保护,加强筋、凸肩和机匣壳体的尖锐棱边保护。
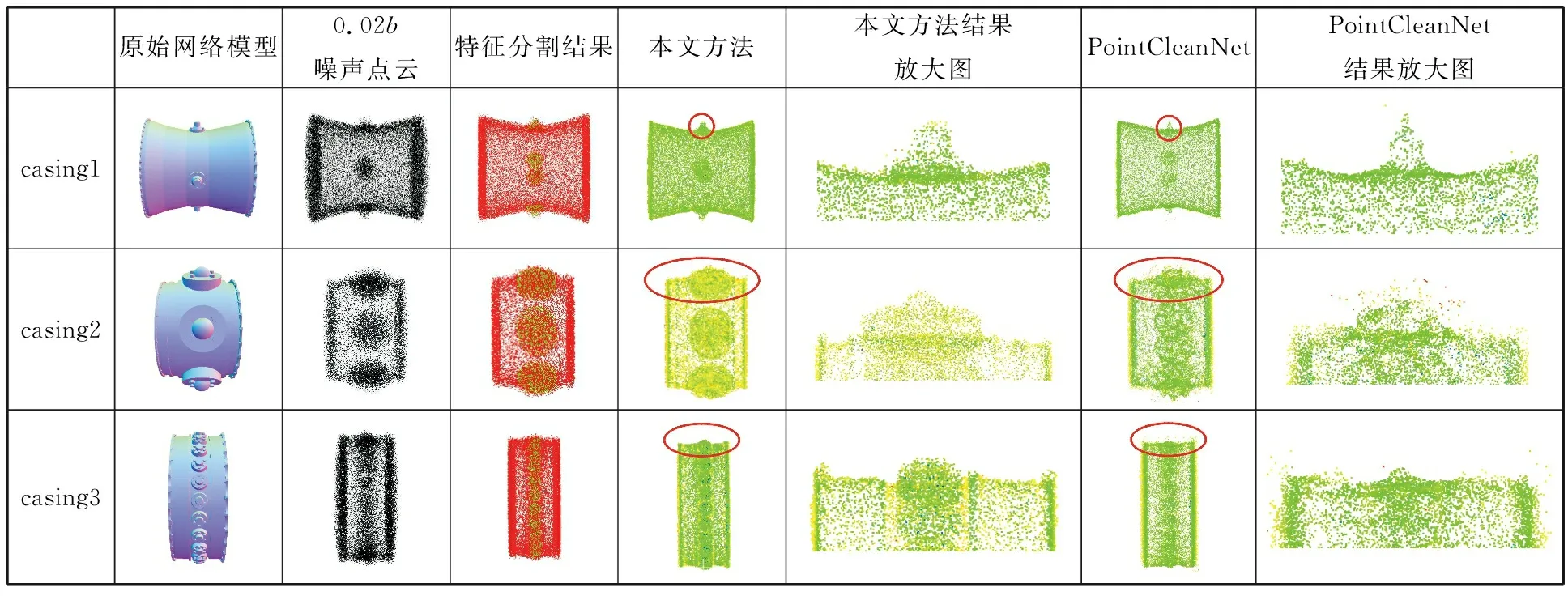
表3 不同方法应用于航空发动机机匣点云去噪结果
casing1的凸台是圆柱形,本文方法保护了它的整体形状,而PointCleanNet将圆柱形凸台破坏成塔形凸台。
casing2的凸台所处的圆柱形机匣壁与其他机匣壁存在台阶,形成一种凸肩结构。本文方法在去除噪声的同时,不仅保护了凸肩的尖锐棱边和安装边的薄壁结构,而且对凸台中半球形细节特征的保护也非常到位,而PointCleanNet并没有从噪声中提取出机匣的整体形状,而且还将凸台的右半部分破坏至塌陷,导致螺栓特征的丢失。
casing3的凸台位于凹陷机匣壁,并且相互之间距离较近。本文方法的结果中凸台点云相互之间是独立的,并且去噪后的整体形状是正确的,除此之外还保护了凸台两侧机匣壳体的尖锐棱边和形状复杂的花形安装边薄壁结构,而PointCleanNet几乎已经将凸台彻底破坏,只剩余部分不规则凸起。
将本文方法与PointCleanNet应用于航空发动机外形噪声点云,结果如图18、图19所示。图18a发动机由10个机匣模型轴向连接而成,是参考实际发动机的尺寸在UG中建模得到的。图18b是上述模型的0.005b噪声点云,0.005b=20.6 mm的噪声尺度相当于发动机每个点有20 mm左右的位置偏移量,选择它验证本文方法的有效性是有说服力的。为了重点观察机匣与机匣轴向装配位置处的安装边结构和凸台形状,选择对应区域放大(图19)。
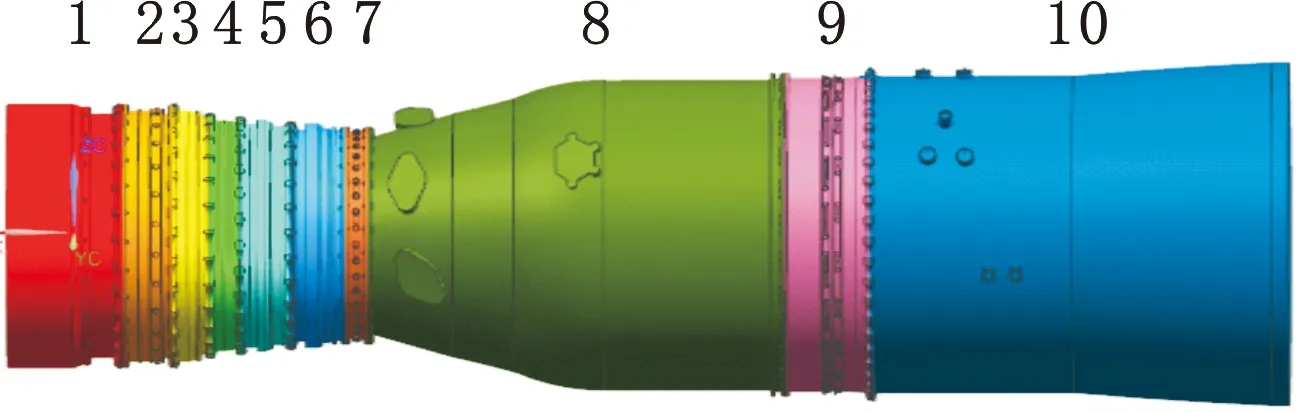
(a) UG建模得到的航空发动机外形几何模型
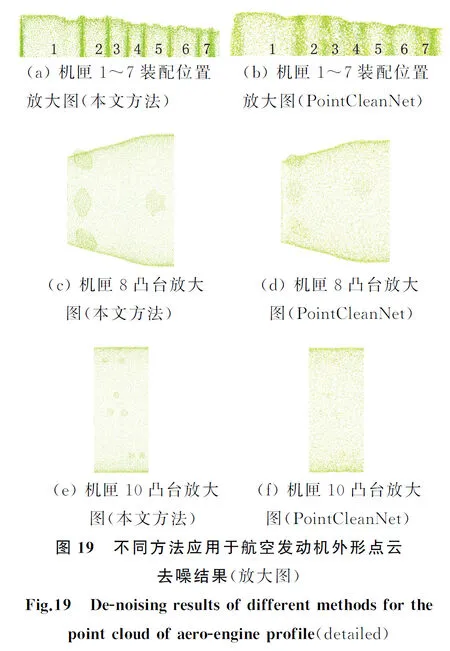
图19a和图19b对比说明:本文方法从噪声数据中恢复出了准确的发动机整体外形,有效保护了机匣与机匣装配位置处安装边的薄壁结构和加强筋的尖锐棱边;而PointCleanNet的去噪结果在整体形状变化的位置都是光滑过度的,这并不符合模型的真实形状。
图19c和图19d对比、图19e和图19f对比说明,本文方法从噪声数据中恢复出了机匣8的4个异形凸台和机匣10的7个圆柱形凸台,它们的形状、大小、位置相比PointCleanNet都是清晰准确的,表明本文方法相比PointCleanNet具有更好的几何特征保护能力。
5.2 与PointCleanNet的定量对比
不同方法作用于各种噪声尺度的发动机外形点云,去噪效果的定量对比如表4所示,其中PointCleanNet、非特征去噪网络和特征去噪网络都只在基础训练集上进行了训练并直接作用于整体点云,本文方法中的非特征去噪网络与特征去噪网络还分别在对应训练集中完成了第二阶段的学习。
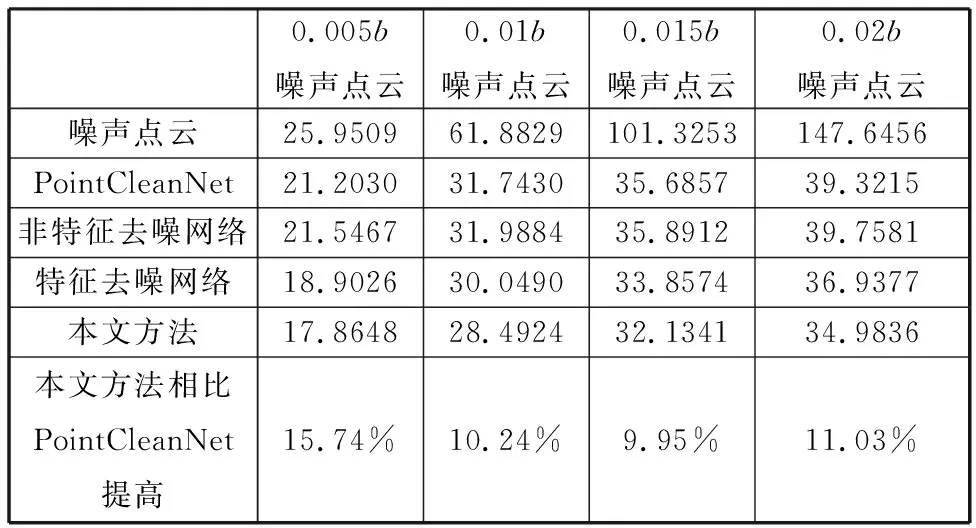
表4 不同方法的去噪效果对比(与干净点云的CD距离)
非特征去噪网络与PointCleanNet对比的结果表明,去除掉特征转换模块后,去噪效果并不会出现明显下降;特征去噪网络相比非特征去噪网络和PointCleanNet的结果表明,在三种局部邻域编码器中,特征邻域编码器收集到了最多最准确的局部形状信息,因此特征去噪网络对噪声点位置修正向量的预测也最准确。
本文方法与特征去噪网络的结果对比表明,去噪效果在大中小各种噪声尺度上都得到了提高,说明先分割再去噪的保特征思路是正确的、合理的、有效的。
本文方法相比PointCleanNet,在四种噪声尺度0.02b、0.015b、0.01b、0.05b的去噪效果上分别有15.74%、10.24%、9.95%、11.03%的提高,说明本文方法是先进的。
5.3 与PointCleanNet的训练时间对比
本文方法和PointCleanNet的训练时间对比结果如表5所示。硬件条件如下:GPU型号Tesla V100-PCIE-32GB 、GPU数量2、内存32G、CPU线程20。表5中数据是三种网络在基础去噪训练集上采用相同的batchsize(取值64)训练1个epoch的运行时间。非特征去噪网络比PointCleanNet快17.9s左右,原因是去除了特征旋转模块,不需要在计算损失函数时添加正则项;PointCleanNet比特征去噪网络快14.6 s左右,原因是特征邻域编码器最大池化了最后三层BasicBlock的输出,采用了更加复杂的信息整合方法。
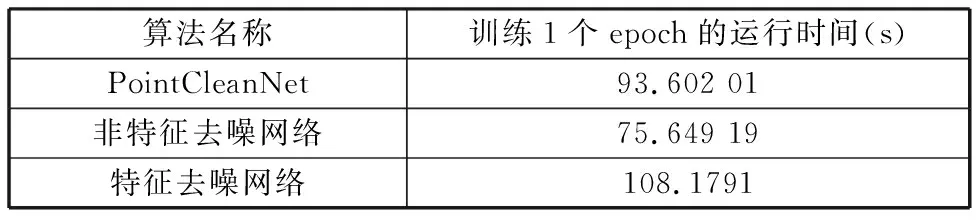
表5 不同网络的训练时间对比
5.4 与PointCleanNet的测试时间对比
本文方法和PointCleanNet的测试时间对比结果如表6所示。硬件条件如下:GPU型号NVIDIAGeForce GTX 1050 Ti、GPU数量1、内存4096M、CPU线程12。表6中数据是三种网络在同一个机匣模型上的测试时间,模型包含的点数为25 952。PointCleanNet比特征去噪网络快5.8 s左右,比非特征去噪网络慢17.9 s,说明非特征去噪网络的复杂度是最低的、PointCleanNet次之,最复杂的是特征去噪网络,但依旧在可接受范围内。
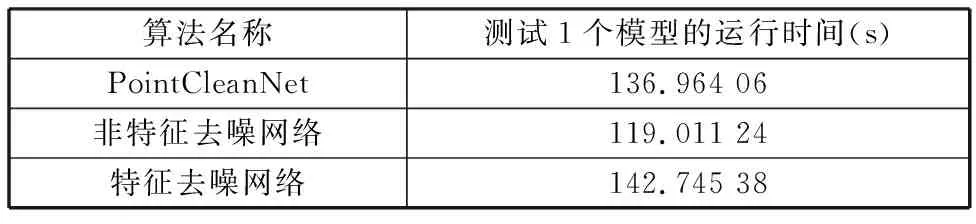
表6 不同网络的测试时间对比
6 结论
为了在去除噪声的同时不模糊或破坏掉发动机复杂的外形几何特征,提出了一种基于深度学习的点云保特征去噪方法。航空发动机外形噪声点云被分割成特征数据与非特征数据之后,根据每种数据的形状特点,分别设计了特征去噪网络和非特征去噪网络,用来预测噪声点的位置修正向量,并将其投影回模型真实的底层表面上。相比现有的学习基方法,去噪效果在大中小各种噪声尺度上都得到了全面的提高,本文方法也具有更好的几何特征保护能力,主要表现在对凸台的整体形状保护和细节特征保护,安装边薄壁结构的保护,加强筋、凸肩和机匣壁的尖锐棱边保护,可以为后续数据处理方法提供高质量点云,有利于重建出准确的航空发动机外形几何模型,为飞机与发动机装配协调设计提供指导。
猜你喜欢
中学生天地(A版)(2022年11期)2022-11-25 07:43:16
中国材料进展(2021年7期)2021-09-18 08:25:20
航空发动机(2020年3期)2020-07-24 09:03:24
吉林大学学报(理学版)(2020年3期)2020-05-29 06:32:16
航空维修与工程(2020年3期)2020-04-10 08:14:06
新世纪智能(英语备考)(2018年11期)2018-12-29 10:56:52
自动化学报(2018年7期)2018-08-20 02:59:04
小学生学习指导(低年级)(2016年10期)2016-12-01 06:10:42
周口师范学院学报(2016年5期)2016-10-17 06:36:47
华东理工大学学报(自然科学版)(2014年2期)2014-02-27 13:48:48
