双波长智能协同激光制导方法研究
2021-12-14 14:54毕祥丽宋毅恒闫秀生高文清
量子电子学报 2021年6期
毕祥丽,宋毅恒,闫秀生,高文清
(1光电信息控制和安全技术重点实验室,天津 300308;2中国电子科技集团公司光电研究院,天津 300308)
0 引言
随着世界新军事变革的不断发展与高新技术的广泛应用,现代战争的作战形态和作战理念正在发生深刻的变化。精确制导武器具有命中精度高、可实施远程精确打击、杀伤威力大、总体效能高等优点,无疑成为追求战争效益的重要手段。
由于在半主动激光制导过程中,需要持续地向所攻击目标发射编码脉冲激光指示信号,该信号容易被人截获和破译,因而,激光制导武器存在易于受到人为欺骗干扰的致命缺陷。随着激光干扰技术的发展和战场环境越来越复杂,激光制导武器面临着日益严重的干扰威胁,传统单一模式、单一体制的制导技术显得力不从心[1],难以达到作战预期,因此多模复合制导的军事需求日渐凸显。
针对激光制导武器面临当前激光有源欺骗干扰,难于发挥其应有作战效能的现实,本文提出了双波长智能协同激光制导方法,通过采用多模智能协同制导攻击技术、双波长多模激光同一化探测技术、多模激光制导抗干扰技术,最大限度发挥激光制导武器精确打击的作战效能。
1 激光制导武器发展现状分析
1.1 激光制导武器国外发展现状
目前,世界各国列装的半主动激光制导武器已达几十种系列、上百种型号。20世纪90年代,世界各国都在努力发展多模复合制导技术,而双模复合制导是目前发展的主流,表1为双模复合制导方式应用实例[2]。

表1 现阶段研制成功的双模导弹Table 1 Dual mode missile successfully developed
GBU-53/B SDB II(Small Diameter Bomb II,SDB II)小直径炸弹II(如图1),美军命名“暴风之锤”,是美国雷声公司生产的一种无动力滑翔、精确制导、空对地、防区外的小型战术航空炸弹[3,4]。SDB II制导模式是中段制导采用GPS(卫星定位)/IMU(惯性测量),末制导采用半主动激光/非制冷红外成像/毫米波雷达三模导引头。SDB II对打击固定目标射程是110 km,对移动目标射程为74 km,能适应各种气象条件,具有低附带损伤,是目前世界上综合性能最好的空中打击武器。
图1 GBU-53/B SDB II(小直径炸弹II)-“暴风之锤”[3]Fig.1 GBU-53/B SDB II(Small diameter bomb II)-“Storm Bolt”[3]
2018年4月,雷声公司完成了SDB-II在F-15E攻击鹰战斗机上的开发和集成[5],图2所示为F-15E携带SDB-II进行挂飞测试。如图3所示,F-35隐身战斗机能够内置8枚、外挂16枚SDB-II,一架F-35A每个架次就能攻击24个地面目标。SDB-II计划在2022年前装备到F-35战斗机。

图2 F-15E携带SDB-II进行挂飞测试Fig.2 F-15E carrying SDB-II for flight test

图3 F-35隐身战斗机内置8枚SDB-IIFig.3 F-35 stealth fighter built in 8 SDB-II
1.2 激光制导武器国内发展现状
中国的激光制导武器起步较晚,直到上世纪90年代开始引进挂载能力较强的苏-27战斗机后,激光制导炸弹才开始快速发展,代表性装备有2009年1月首度公开亮相的“雷霆”LT-2激光制导炸弹,该炸弹具有全天候精确打击能力,其精度为6.5 m。
2018年珠海航展中展出的GP155型(GP 1型)155 mm激光半主动末制导激光炮弹,如图4所示。研仿俄罗斯“红土地”系列的GP1发展较快,大量装备部队,最大射程为20 km。

图4 GP155型155 mm激光末制导激光炮弹Fig.4 GP155 155 mm laser terminal guided laser shell
2018年珠海航展中展出的国产GB250型250 kg的激光卫星复合制导炸弹,如图5所示。其适合攻击距离较远的固定目标,但需要增加增程套件并使用捷联惯导+激光末制导。

图5 GB250型250 kg激光卫星制导炸弹Fig.5 GB250 250 kg laser satellite guided bomb
1.3 激光制导武器发展趋势分析
激光制导武器技术现已非常成熟,随着现代战争的演变,对激光制导武器的发展提出了新的要求。激光导引头发展将逐渐向多模复合、模块化、捷联式、小型化转变,以满足制造探测距离更远、抗干扰能力更强、成本更低、战场适应能力更强等要求。激光制导武器发展新趋势为:1)提高武器攻击能力;2)多模式复合制导;3)提高机组人员和载机安全性。
由激光制导武器国内外发展现状与发展趋势分析可知,国内的激光制导武器从制导精度、抗干扰能力、作用距离、战场环境适应能力等方面都与国外存在较大差距,尤其在多模制导领域,国内目前仍处于理论研究或实验室验证阶段,实际应用较少,激光武器制导精度、抗干扰能力、多模制导技术及智能目标探测能力水平亟待提高。所提出双波长激光制导方法,当采用连续波制导时,0.808 μm是非告警波长,具有更强的抗人为激光干扰能力,从而更有利于对目标精准跟踪和抗干扰。
2 双波长智能协同激光制导总体构想
提出采用1.06 μm脉冲激光、0.808 μm连续波调制激光与北斗卫星导航系统(BDS)的双波长多模智能协同制导的总体构想,如图6所示。中制导阶段采用BDS制导方式,末制导阶段采用激光主制导与BDS辅助制导模式[6]。在激光末制导过程的前大半段,采用通常的1.06 μm脉冲激光主制导方式,BDS辅助制导;在弹体将要接近攻击目标的1~2 km距离范围内,切换至0.808 μm连续波调制激光主制导方式,1.06 μm脉冲激光与BDS辅助制导。
图6 1.06 μm脉冲/0.808 μm连续/BDS多模智能协同激光制导模式Fig.6 1.06 μm pulse/0.808 μm CW/BDS multimode intelligent cooperative laser terminal guidance mode
双波长多模激光末制导过程如图7所示,机载激光目标指示器可发出1.06 μm脉冲和0.808 μm连续波调制两种激光指示信号。激光制导炸弹在攻击目标的过程中,其前大半段(简称A段-编码脉冲制导),导引头采用通常的1.06 μm脉冲激光制导方式,BDS辅助制导可提供精准方位信息以利于目标识别;当炸弹通过分界点C后,进入要接近攻击目标的1~2 km距离范围内(简称B段-连续波制导),则自动切换至0.808 μm连续波调制激光制导方式,1.06 μm脉冲激光制导为辅助制导,可辅助为探测连续波调制激光峰值信号提供同步时间信号,更有利于对连续激光制导信号的精准探测;制导信息处理系统一方面可对连续/脉冲/BDS多体制制导信息进行融合处理,提高跟踪精度,另一方面通过航迹关联与目标鉴别可以进行干扰判别,从而提高多模制导系统的整体制导精度与抗干扰性能。其中,A段制导沿用通常的脉冲编码体制的制导技术,着重探索随机编码防破译和时空相关信号处理抗高重频干扰等强抗干扰措施。B段制导着重凸显其连续波制导的高精度和抗所有人为的激光有源干扰的独特优势,同时要有效避免阳光反射干扰的可能性。
3 双波长智能协同激光制导设计实现
3.1 双波长多模智能协同制导攻击技术
采用如图8所示的脉冲/连续/BDS双波长多模激光制导模式,中制导阶段采用BDS制导方式,BDS制导精度高,能够准确定位相关位置信息,而且不受天气的影响;当弹体进入攻击区域的末制导阶段后,随着干扰信号的增多,BDS的导航精度下降,采用激光主制导与BDS辅助制导模式[7]。在制导过程中,BDS属于全程制导,作用显著,对研制的高精度制导系统是必不可少的。在激光末制导过程的前大半段,采用通常的1.06 μm脉冲激光主制导方式,BDS辅助制导能够提供精准方位信息以利于目标跟踪。遇到干扰的情况下,制导系统具有纠错功能,脉冲/BDS制导方式可实现智能切换。在弹体将要接近攻击目标的1~2 km近距离范围内,切换至0.808 μm连续波调制激光主制导方式,更有利于对目标精准跟踪和抗干扰,1.06 μm脉冲激光/BDS辅助制导。同时,现有激光告警设备均是探测脉冲信号告警体制,不能对连续波告警,并且0.808 μm是非告警波长,因此,连续波制导具有更强的抗人为激光干扰的能力。此阶段,1.06 μm脉冲激光制导为辅助制导,可辅助为探测连续波调制激光峰值信号提供同步时间信号,有利于对连续激光制导信号的精准探测。最后,制导信息处理系统对连续/脉冲/BDS多体制制导信息进行制导信息融合处理和关联计算,从而提高多模制导系统的整体制导精度与抗干扰性能。
图8 1.06 μm脉冲/0.808 μm连续/BDS多模激光制导智能协同示意图Fig.8 Intelligent coordination diagram of 1.06 μm pulse/0.808 μm continuos/BDS multimode laser guidance
在工作的不同阶段采用不同的制导模式,当遇到干扰等情况下不同模式间实现智能切换,系统具有纠错能力,分析不同模式各自技术特点和能力制约,决策不同阶段采用最佳制导模式,合理调整末制导两个制导阶段的接力节点,以期达到最佳的制导精度和攻击效能。
3.2 激光制导多模激光同一化探测技术
双波长多模激光同一化探测是实现双波长多模激光制导的关键。首先进行脉冲与连续调制激光信号同一化探测参数分析。激光导引头对目标回波信号的探测需要用激光雷达测距方程来计算,即

式中:Pr为探测器接收功率(W),Pt为激光发射功率(W),Gt为发射天线增益,σ为目标散射截面积(m2),D为接收孔径(m),R为探测距离(m),ηArm为单程大气传输系数,ηsys为光学系统透过率。
半主动激光制导武器攻击对象为地面目标,因此,可将被攻击目标看做扩展目标,即激光导引头接收到目标的全部回波光束,光斑附近的所有辐射都能反射[8]。当照射为圆形光斑时,照射的面积为,式中:dA为激光照射目标面积,θT为发射激光的衍射极限角。对于扩展的朗伯散射目标有

于是有

式中:Pr为到达导引头探测单元的激光功率;Pt为激光发射功率;θ为激光光束发散角;ρ为目标的平均发射系数。
此处采用的APD的四象限探测器具有极高的探测灵敏度,满足探测灵敏度的需求;同时,激光调制信号带宽较激光脉冲信号窄,更有利于系统噪声抑制及放大增益的提升。
激光导引头光学镜头设计要充分考虑双波长激光探测的双峰滤光和消色差要求,设计双波长激光探测的双峰滤光和消色差光学系统;同时兼顾不同波长短脉冲激光信号和连续波调制激光信号的不同特点,设计双波长兼容的四象限光电探测电路和放大电路,实现双波长多模激光同一化探测。图9为双峰滤光消色差光学系统示意图,图10为双波长激光导引头组成及工作原理框图。

图9 双峰滤光消色差光学系统示意图Fig.9 Schematic diagram of achromatic optical system with bimodal filter
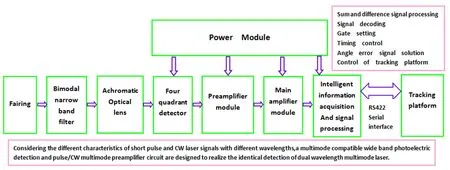
图10 双波长多模激光导引头组成及工作原理框图Fig.10 Compositon and working principle block diagram of dual wavelengh multimode laser seeker
3.3 激光制导抗干扰技术
针对激光制导过程的不同阶段和不同工作模式,采用了较为全面的抗干扰措施,可有效破解当前和未来发展的各类激光有源干扰,提高了系统整体的制导精度、抗干扰能力与目标鉴别性能。
3.3.1 1.06 μm脉冲制导阶段抗角度欺骗和高重频激光干扰
所提出的激光导引头采取的抗干扰手段是在制导信号模式上采用双波长多模智能协同激光制导和随机编码脉冲信号防破译模式技术,在导引头信号处理方法上采用抗同步欺骗干扰高精度时域相关信号处理技术和抗高重频激光干扰时空综合相关信号处理技术,可提高制导精度并有效破解激光欺骗干扰和高重频激光干扰威胁,如图11所示。
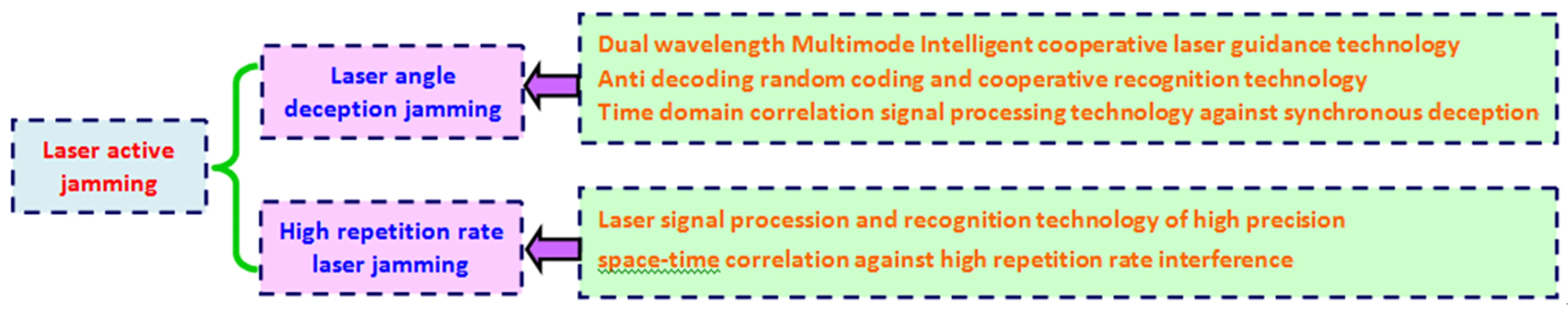
图11 双波长激光导引头抗干扰措施功能示意图Fig.11 Function diagram of anti-interference measures for dual wavelength laser seeker
3.3.2 随机脉冲编码防破译抗激光欺骗干扰
如图12所示,建立脉冲间隔数据表和数据地址指针表:以从小到大的顺序存入脉冲间隔数据表,地址指针打乱次序后随机排列,通过地址指针顺序读取脉冲间隔值,从而产生随机脉冲编码激光指示信号。
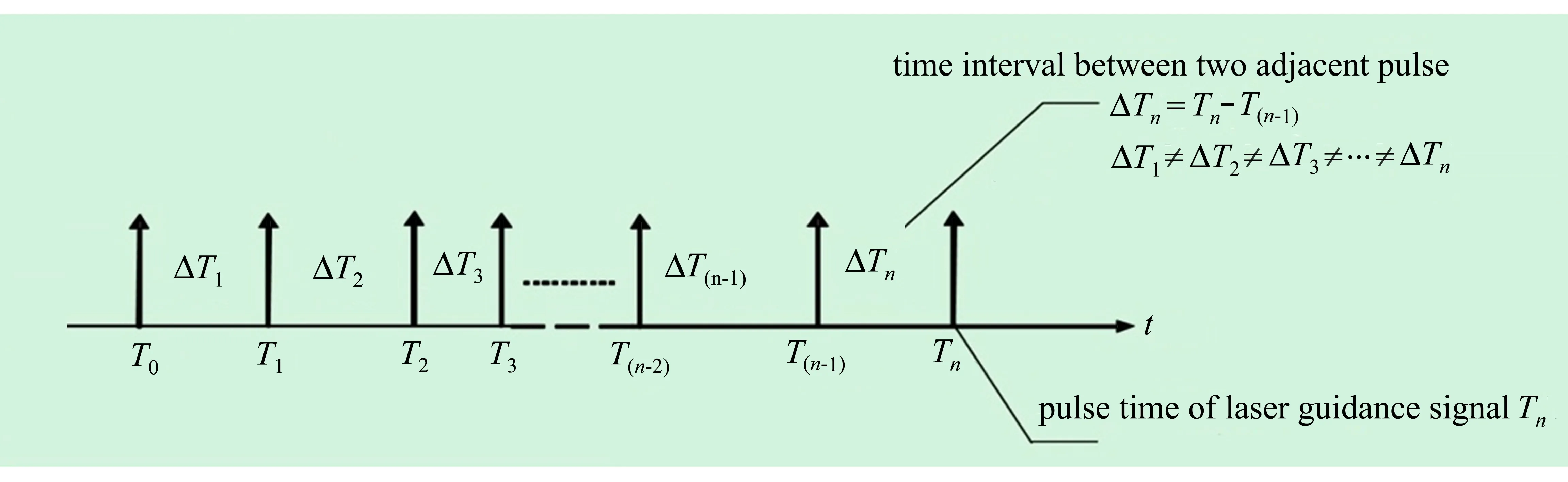
图12 无重复性脉冲时间间隔-随机脉冲编码示意图Fig.12 Schematic diagram of non-repetitive pulse time interval-random pulse code
随机编码激光半主动制导武器具有内在设定的脉冲间隔第次规律的激光制导脉冲序列的信号模式。在整个制导过程中,激光制导信号脉冲序列的时间间隔各不相同,也不相关,局外者探测到的激光制导信号的到达时刻完全是随机的,不具备任何可破译和识别的时间特征。因此,目前常规体制的激光角度欺骗干扰装备无法对采用随机编码的激光制导武器进行有效干扰与诱骗。
3.3.3 0.808 μm连续波调制激光制导抗阳光反射干扰
采用0.808 μm连续波调制主激光制导方式,因为连续波调制激光信号更易于精确跟踪目标,使系统制导精度更高;同时,现有激光告警设备均是探测脉冲信号告警体制,不能对连续波告警,并且0.808 μm是非告警波长,因此,连续波制导具有更强的抗人为激光干扰的能力。此处需主要考虑抗阳光反射干扰的问题,可采用窄带滤波、相关检测等方法剔除干扰。
4 结论
针对现代复杂战争环境下激光制导武器面临激光有源干扰的严重威胁,传统的单一模式、单一体制的制导技术显得力不从心,导致激光制导武器生存能力、作战效能、高精度制导以及高效能探测识别能力不足等突出问题。开展了双波长多模智能协同激光制导方法和具有强抗干扰能力的激光制导技术研究,通过采用双波长多模智能协同制导攻击、双波长多模激光同一化探测、多模激光制导抗干扰技术,从而提升现有激光制导武器的制导性能、抗干扰能力和智能探测与识别攻击目标能力,充分发挥其应有的作战效能。
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年6期)2021-07-20
中国新技术新产品(2020年19期)2020-12-25
舰船电子工程(2019年10期)2019-11-13
兵器装备工程学报(2019年10期)2019-11-08
空天防御(2019年3期)2019-08-23
火力与指挥控制(2019年6期)2019-07-20
科学与财富(2019年4期)2019-04-04
大陆桥视野·下(2016年3期)2016-05-05
工业设计(2015年7期)2015-10-21