无人机倾斜摄影技术在智慧校园实景三维建模中的应用
2021-12-11 10:01:50占森方李元松陶文华杨毛毛
科技创新与应用 2021年36期
占森方,李元松,陶文华,陈 阵,杨毛毛,姜 珊
(武汉工程大学 土木工程与建筑学院,湖北 武汉430074)
智慧城市理念自2008年诞生以来,在国际上引起广泛关注并持续发展[1],教育行业作为智慧城市的重要组成部分被社会各界重点关注,2010年浙江大学提出智慧校园概念[2],智慧校园作为未来校园发展的新理念和新实践,成为学术界和教育界关注的焦点。近年来,国家相关部门相继出台了智慧校园建设规范标准,2018年发布的《智慧校园总体框架(GB/T 36342-2018)》提出基于地理信息技术、虚拟现实技术、计算机图形学等高新技术,以真实校园整体为蓝本,构建三维可视化的逼真校园环境和景观。
传统的三维建模技术通常使用3ds Max、AutoCAD等建模软件,基于影像数据、CAD平面图进行人工建模,这种方法建设周期长、成本高、与真实世界反差大[3];近年来,随着小型无人机技术的进步与成熟,倾斜摄影测量技术得到迅猛发展,该技术以大范围、高清晰、高精度的方式全面感知复杂场景,通过高效的数据采集设备及专业的数据处理流程生产的三维模型直观地反映地物的外观、位置、高度等属性,建设周期短、生产效率高、成本低,如今已成为实景三维建模的主流趋势。
1 无人机倾斜摄影技术
无人机倾斜摄影技术是以无人机作为空中平台,结合GPS差分定位、摄影机和遥感传感器等技术,获取高精度、高分辨率的影像等信息,应用于勘探、测绘、建模等方向的先进新兴综合技术[4]。无人机倾斜摄影技术路线如图1所示。

图1 无人机倾斜摄影技术路线
1.1 布设像控点
像控点是无人机倾斜摄影业内影像解析和建模的基础,用于纠正无人机因定位受限或电磁干扰而产生的位置偏移、坐标精度过低以及因气压计产生的高层差值过大等问题。像控点布设要求均匀分布在航摄区域航向和旁向重叠范围内,像控点选点应选在平坦、相对固定易于准确测量、目标影像清晰且易于判刺的地方[5],做好易于分辨且不易被破坏的标记,一般采用标靶式或油漆式像控点标记。
1.2 航摄参数设计
航摄参数设计主要包括地面分辨率、航行高度和像片重叠度等。
1.2.1 地面分辨率
地面分辨率(GSD)是指每毫米所能辨别的黑白相隔的线对数(线对/毫米),通常以像元的大小来表示,一般像元越小,地面分辨率越高,信息量越大。GSD应根据航摄成图的比例尺、地形等条件确定,通常参考表1。

表1 地面分辨率取值参考
1.2.2 航行高度
航行高度由相机参数和地面分辨率所决定,计算公式如式(1)所示。对提高建模精度而言,适当调低航行高度有一定效果,但如果航高过低会导致像片数量过多,增加外业像控和内业建模的工作量,并且航高过低会增大安全风险[6]。《低空数字航空摄影规范》规定:摄影分区内地形高差不应大于1/6航高。因此,应综合考虑建模精度、工作量、规范和安全等因素,在满足各项技术精度指标的前提下,确定相对适宜的航高。

式中:H-航行高度,单位为m;f-镜头焦距,单位为mm;GSD-地面分辨率,单位为m;α-像元尺寸,单位为mm。
1.2.3 重叠度
航向重叠度是指一条航线上两张相邻像片的重复率,一般取60%~80%;旁向重叠度是指两条相邻航线上像片之间的重复率,一般取30%~75%。重叠度计算公式如式(2)所示。由式(2)可知,重叠度由相较于基准面的高差Δh决定,Δh为0时,重叠度与标准值相同,因此在设计像片重叠度时要考虑高差因素,一般适当增加重叠度以满足精度要求。

式中:pX,qY-像片上的航向重叠度和旁向重叠度(%);p′X,q′Y-航摄像片的航向和旁向标准重叠度(%);Δh-相对于摄影基准面的高差,单位为m;H-摄影航高,单位为m。
1.3 航线敷设
确定航高、重叠度之后,计算航线距离,航线距离即为相邻两航带间隔,其计算公式如式(3)所示。通过计算确定航线距离后,按测区实际情况计算航线条数,敷设航线,航线通常按照东-西向敷设,带状范围沿着窄边飞行为宜。航线规划完成后,需勘察地形,选择合适的起降场地,应避开禁飞区或影响飞行安全的建筑,选择行人较少、视野开阔的区域。

式中:Sx-航线距离,单位为m;Mi-旁向重叠度(%);Ki-绝对航高,单位为m;Ji-最高点高程,单位为m;b-镜头焦距,单位为mm;m-底片宽度,单位为mm。
2 实景三维建模技术
对获取的无人机遥感影像进行处理,首先确定所采用的坐标系统,将采集到的坐标数据向目标坐标系进行转换,结合影像的POS数据、布设的像控点等信息进行空中三角测量[7],然后通过图像几何畸变校正、图像增强、影像拼接等处理,生产三维模型。处理遥感影像的三维建模过程如图2所示。

图2 遥感影像三维建模流程
目前,Context Capture、PhotoScan以及Pix4Dmapper是业界主流的倾斜摄影建模平台,通过建模速度、模型精度、工作量等方面对三款软件进行对比,如表2所示,综合考虑选择Context Capture作为校园实景三维模型建模平台。在模型生产过程中,受到航摄盲区、像片质量及POS参数准确度等问题的影响,会造成模型部分区域空洞、扭曲、映射错误、纹理丢失等[8],Dp Modeler可以对实景三维模型进行踏平、桥接、补洞、纹理修改等操作,实现模型整体修饰,因此本文采用Dp Modeler对实景三维模型进行精细化处理。

表2 建模软件综合对比
3 校园实景三维建模应用
3.1 获取校园遥感影像
以武汉工程大学武昌校区为例,使用大疆御Mavic 2双光行业版无人机作为航摄设备,飞行器参数见表3,相机参数见表4。由于学校附近存在禁飞区,因此选取远离禁飞区的校园区域作为试验区,试验区面积500m×500m,划分为一个航摄区域,使用航拍板在航摄区域内均匀布设五个像控点并测量像控点坐标、高程。由于试验区面积不大,因此成图比例尺取1:500,根据表1将地面分辨率设置为5cm,由表4可知相机像元尺寸为0.012mm,根据表4将相机焦距设置为35mm,通过式(1)计算航行高度,应设置为150m。试验区内建筑密集,根据《低空数字航空摄影规范》规定和大疆御Mavic 2航摄设备精度要求,适当提高重叠度,航向重叠度设置为70%,旁向重叠度设置为60%。试验区最高建筑30m,根据式(3)和表4相机参数计算航线距离,应设置为90m,试验区宽度500m,故应布设6条航线。

表3 飞行器参数

表4 相机参数
选择晴朗、无风、少云的天气进行航摄任务,在无人机遥感控制器中划分测区,输入上述参数,无人机自动生成最优航摄路线、飞行速度、摄影间隔等,选择空旷无人、视野开阔的起降地点,开始航摄任务,在无人机执行任务时监测无人机状态,确保航摄设备正常工作,无人机任务结束后检查影像质量,共获得242幅有效影像。
3.2 校园实景三维建模
使用Context Capture处理倾斜摄影获取的遥感影像,新建一个工程,导入遥感影像,检查影像完整性,将外业测量的控制点信息通过像片刺点输入到建模系统中,将像片POS信息输入系统中,进行空中三角测量运算。空中三角测量运算完成后提交模型重建项目,输入空间参考坐标,为模型生产项目划分瓦片,进行实景三维模型重建。三维模型重建完成后使用Dp Modeler对模型进行精细化优化,填补模型空洞,将模型扭曲部分踏平,修饰纹理,试验区实景三维建模结果如图3所示。校园实景三维模型通过LOD Tree Export向校内师生和社会人士展示,能够提高模型的渲染度,并且提供漫游功能,完美展现校园风貌。
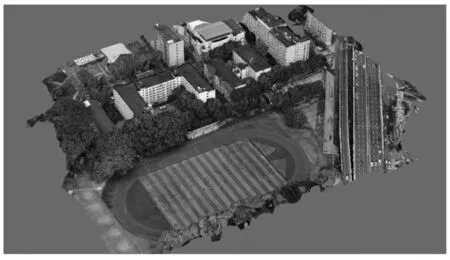
图3 试验区实景三维模型
4 结束语
通过无人机倾斜摄影技术、三维建模技术,以武汉工程大学武昌校区为试验区,进行实景三维建模试验,其效果良好,可以应用于智慧校园建设。还可以进一步使用GIS处理三维模型,为模型各建筑物、道路等创建节点,基于物联网技术,在现实中使用近场通信等技术关联各节点,实时更新节点信息,用户通过点击模型节点可以查询实时信息,例如教学活动情况、社团活动情况等,实现虚拟世界与现实世界的关联,进一步实现校园智慧化。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16 07:51:04
华人时刊(2021年23期)2021-03-08 09:27:24
商周刊(2019年19期)2019-10-17 03:23:44
今日农业(2019年10期)2019-01-04 04:28:15
现代测绘(2018年3期)2018-09-13 09:34:46
现代营销(创富信息版)(2018年8期)2018-09-08 08:52:10
科学与财富(2017年19期)2017-07-19 10:59:15
长江工程职业技术学院学报(2017年2期)2017-06-19 18:49:05
北方音乐(2017年4期)2017-05-04 03:40:09
大社会(2016年6期)2016-05-04 03:42:08