基于机器视觉的苹果重量检测研究
2021-12-09 17:28:00刘忠超范灵燕盖晓华
江苏农业科学 2021年21期
刘忠超 范灵燕 盖晓华


摘要:苹果的采后分级能够提高其经济价值和市场竞争力,为了实现基于重量的无接触苹果智能分级,提出了基于机器视觉的苹果重量检测方法。首先,采集苹果图像进行预处理,得到平滑无噪声的苹果二值图像。然后,用最小外接矩形方法获得苹果的横径和纵径等主要几何外形特征,建立以苹果外形几何特征为参数的重量检测回归模型。结果表明,苹果重量检测值相對误差低于2%,最大绝对误差不超过4 g,检测准确性较高。采用非接触式的检测可以克服传统机械式接触对苹果造成的损害,能保证分级后苹果的质量,满足苹果分级生产要求。
关键词:机器视觉;苹果;重量;最小外接矩形;拟合;分级
中图分类号: TP242.6 文献标志码: A
文章编号:1002-1302(2021)21-0201-04
收稿日期:2021-03-19
基金项目:国家自然科学基金(编号:61504072);河南省科技攻关项目(编号:202102110124);南阳理工学院博士科研启动基金项目(编号:NGBJ-2019-07);南阳理工学院高等教育教学改革新工科专题研究资助项目(编号:NIT2020XGKJY-02)。
作者简介:刘忠超(1979—),男,河南南阳人,博士,副教授,主要从事农业机器人、智能化检测与控制研究。E-mail:fly200578@sina.com。
我国是重要的苹果生产大国,苹果产后分级可以提高苹果的经济价值[1]。目前苹果分级主要采用人工分级和机械分级,人工分级劳动强度大、效率低,易受个人心理因素的影响[2];机械分级效率较高,主要依据苹果的果径或重量进行分级,重量是评定苹果等级的一个重要依据[3]。目前,市场上的苹果重量测定通常采用称重法,即采用机械秤或电子秤对苹果逐一称重以获得其重量参数。这样的重量测定方法操作繁琐且存在一定误差,并且在水果分拣时需要耗费大量人力和物力。此外,频繁接触果实会对果实表皮造成损伤,同时易使果实受细菌及污秽物污染,造成果实的鲜度与品质受损[4]。
基于机器视觉的无损检测技术具有检测速度快、非接触式的优点,可以克服接触式系统对苹果造成的损伤,保证分级后的苹果质量,为苹果的采后分级提供了有效的解决方案[5]。因此,本研究选取红富士苹果为样本,利用最小外接矩形法获取苹果的最大横径与最大纵径,通过苹果体积与其重量拟合的方式,建立苹果重量预测模型,能借助机器视觉系统实现对苹果重量的实时、快速、准确、无损检测。
1 苹果图像视觉采集系统
苹果重量检测的机器视觉系统主要以计算机为处理核心,由视觉传感器、视觉采集和计算机处理系统组成。图1为苹果图像采集的视觉系统原理。其中计算机配置为英特尔Core i7处理器,运行内存8 G,64位操作系统,Windows 7操作系统。图像采集模块:深圳万瑞兴科技有限公司WRX-M162型号摄像头模组,1080P像素,USB 2.0接口方式,工作电压+5 V。
在苹果图像采集获取系统中,光源的布置和背景的选择影响着成像的质量。为了使采集的苹果图像清晰,经过对比研究,图像采集背景采用PVC黑色发泡板制作而成。光源模块:2个LED补光灯置于暗箱顶部侧面,额定功率6 W。设计的苹果图像采集系统见图2。
2 苹果重量检测系统
苹果重量预测系统主要有苹果图像检测模块、图像预处理模块、苹果特征参数检测模块、重量预测模块组成,图3所示为苹果重量检测系统流程图。
2.1 苹果图像预处理
将采集的彩色苹果图像先进行灰度化处理,并将采集到的彩色苹果图像通过二值化处理,转换为像素值为0的黑色背景和像素值为1的目标图像。同时,借助于高斯滤波和形态学处理,得到清晰的苹果目标边缘轮廓,如图4-a、图4-b所示为苹果原始图像和预处理图像对比效果。
2.2 苹果形态分析
选取红富士苹果作为试验样本,其果形近似球形,果实遍体通红,比较有利于图像采集及后续处理。虽然不同种类的苹果果型稍有差异,但通过分析不同品种苹果外形,可知苹果几何结构近似球体,理论上可以用计算球体体积的方法预测苹果体积。但是苹果实际外形与圆球形状仍存在一定差异,使苹果体积预测产生较大误差[6]。因此,采用最小外接矩形对球形体积公式进行了改进,采用公式(1)所示的一种幂函数模型实现苹果的体积估算[7]。
V=aR3+bR2。(1)
式中:V表示苹果体积;R表示苹果横、纵径平均值,其值取为(横径+纵径)/2;a、b表示模型系数。
苹果图像最小外接矩形示意图见图5,通过最小外接矩形法可以获得苹果的横径和纵径。
2.3 苹果特征参数提取
苹果的横、纵径大小是衡量单个苹果大小的重要几何特征,这一特征可以通过近似苹果的最小外接矩形来获得。最小外接矩形法[8]比较适用于机器视觉技术在线检测苹果的横、纵径,其算法实现过程如下:确定苹果的形心,使其边缘绕苹果形心旋转,每次旋转3°,对旋转之后的苹果作外接矩形,旋转1周后,寻找面积最小的矩形即为最小外接矩形,其中最小外接矩形的最大边长为苹果的横径,最小边长为苹果的纵径[9-10]。
在Windows 10 64位操作系统下,基于PyCharm 2018和OpenCV 3.4.6,用Python 3.6.4设计的苹果横径、纵径测量结果如图6所示。图中通过最小外接矩形法[11]得到的苹果横径、纵径的单位为像素,而苹果实际直径单位是mm,因此需要进行图像标定实现单位转换。图中采用标准的5角硬币作为图像标定的参考物体,标准尺寸大小为20 mm,绿色线框为最小外接矩形,4个蓝色小圆点分别为最小外接矩形4条边的中点,中间2条线分别为苹果的横径和纵径,经标定转换可得到实际苹果的横径长度为 71 mm,纵径长度为63 mm。
试验选取20个红富士苹果作为样本用于建立重量预测模型,为验证机器视觉对苹果横、纵径检测结果的准确性,采用剖面测量法测量苹果实际横纵径尺寸,方法如下:将苹果纵向剖开,采用精度为0.02 mm的游标卡尺测量其中一个剖面,检测X值即为苹果的实际横径,检测Y1、Y2值并求其平均值即为苹果的实际纵径(图7)。
表1为20个苹果样本经机器视觉和剖面测量法检测出的苹果横、纵径数据。在线检测的横径与人工检测的实际横径平均误差为0.94 mm,在线检测的纵径与人工检测的实际纵径平均误差为 0.81 mm,误差值较小,表明基于机器视觉获取的苹果特征参数与真实值接近度高, 能够真实地反映苹果的实际特征。
2.4 苹果体积预测模型
为了获得苹果体积计算公式(1)的模型系数a、b,自制测量工具获得苹果实际体积,建立体积模型。由于苹果沉于水且不溶于水,可采用排水法或者溢水法测量苹果体积[12],排水法通过直接测量所溢出的水的体积得到待测苹果体积,操作简单方便,因此系统采用排水法测量苹果果实的体积。
排水法测量苹果实际体积操作步骤如下:(1)将自制排水烧杯、载物台、量杯按图8所示物品摆放位置摆放好。(2)向排水烧杯中加水至排水口,液面与排水口平齐并且没有水流出。(3)将待测苹果缓缓放入水中,由于苹果密度与水相差不大,不能完全沉入水中,此时可采用一根细针将其压入水中,待出水口没有水流出时记录量杯刻度,并按照编号记录数据。
为了验证式(1)的预测苹果体积模型的准确性,将样本苹果通过近似球体计算、式(1)计算和排水法测定。由表2可知,以横、纵径平均值R为自变量构建的苹果体积预测模型与苹果实际体积测量值之间的平均误差为0.04。采用近似球体公式估算的苹果体积预测值与苹果实际体积测量值之间的平均相对误差为0.14。由此可见,以苹果横径、纵径的平均值构建的苹果体积预测模型可靠性更高。
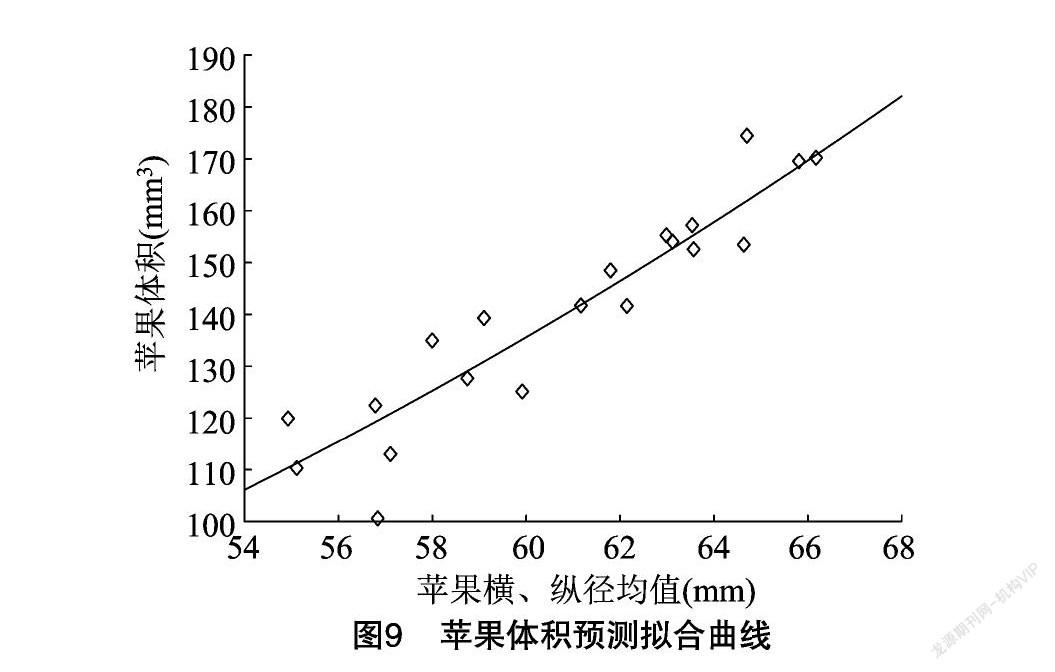
如图9所示是20个蘋果样本的横、纵径均值与苹果体积之间的幂函数拟合曲线。
经过MATLAB软件拟合之后,可得到苹果的体积预测模型系数a、b分别为0.000 215 3、0.024 86,因此苹果体积预测模型如公式(2)所示:
V=0.000 215 3R3+0.024 86R2。(2)
2.5 苹果重量检测
基于机器视觉技术的重量预测关键在于寻找影响苹果重量的因素。由文献[13]可知,苹果的成熟度、鲜度、横纵径、体积均有可能影响苹果质量预测值。
考虑到苹果重量预测应用到苹果分级加工销售的特殊性,按照水果市场上鲜果加工常识来看,苹果果实都是已经成熟而且鲜度高、含水量高的,因此苹果的重量主要考虑苹果的横、纵径和体积。
利用MATLAB软件对苹果的实际重量分别与苹果横、纵径和体积作相关性分析,可知苹果横、纵经与苹果实际重量的相关系数为0.863 6,体积与苹果实际重量的相关系数为0.872 9,两者相关性均较好,可以将苹果横、纵径和体积确定为影响苹果预测重量的因素。
3 苹果重量的机器视觉检测模型
由分析可知,苹果的横纵径均值与苹果体积相关性较好,是影响苹果重量的重要因素,选取苹果横纵径均值R、苹果体积V作为自变量,苹果实际重量M为因变量,建立如式(3)、式(4)所示的苹果重量多元线性函数模型和多元混合函数模型[14]。
M=a1+b1R+c1V;(3)
M=a2+b2R+c2V+b3R2+c3V2;(4)
式中:a1、a2、b1、b2、b3、c1、c2、c3为待定常数。
选取20个试验样本用于确定式(3)、式(4)中的待定常数,以建立苹果重量的检测模型。利用MATLAB软件拟合数据之后,可得多元线性拟合模型如式(5)所示:
M=-125.2+3.266R+0.381 7V。(5)
多元混合函数拟合模型如式(6)所示:
M=2 851-156R-90.94V+5.207R2+0.013 66V2。(6)
2个苹果重量拟合模型的相关性如表3所示。多元线性函数回归模型的相关系数为0.938 6,表明采用此模型可以比较准确地检测苹果重量。
4 试验结果及分析
为了验证苹果重量预测多元线性回归模型的准确性,随机选取60个成熟的红富士苹果组成测试集,来验证苹果重量和体积、横纵径等体型特征之间模型的准确性。结果表明,苹果重量检测的相对误差低于2%,绝对误差均在4 g以内,能满足苹果重量检测精度的要求。
5 结束语
本研究基于机器视觉技术,提出了基于图像的苹果重量预测方法,可以实现基于重量对苹果进行无损检测分级,增强我国苹果的国际市场竞争力;建立了苹果重量与苹果体积、横纵径间的模型,相关系数为0.938 6,相关关系显著,重量检测值相对误差低于2%,检测准确性较高;苹果重量检测的绝对误差均在4 g以内,能满足检测精度的要求,可用于苹果分级生产,也可为其他鲜果的机器视觉分级和分选等设备研发提供理论支撑。
参考文献:
[1]刘忠超,刘勇军,常有周. 基于S7-300 PLC和Matlab的苹果自动分级系统设计[J]. 江苏农业科学,2018,46(14):197-200.
[2]李 颀,胡家坤. 基于机器视觉的苹果在线分级[J]. 食品与机械,2020,36(8):123-128,153.
[3]王维,刘东琴,王 佩. 果品分级检测技术的研究现状及发展[J]. 包装与食品机械,2016,34(6):55-58.
[4]吴晓强,黄云战,赵永杰. 基于运动控制器的苹果质量分级系统[J]. 食品与机械,2015,31(5):114-116.
[5]徐 赛,孙潇鹏,张倩倩. 大型厚皮水果的无损检测技术研究[J]. 农产品质量与安全,2019(5):30-35,48.
[6]乔 陆,陈 静. 基于SOPC水果分级检测系统研究[J]. 食品与机械,2016,32(8):95-97,201.
[7]韩 伟,曾庆山. 基于计算机视觉的水果直径检测方法的研究[J]. 中国农机化,2011,32(5):108-111.
[8]杜 云,郑羽纶,张效玮. 基于图像处理的苹果大小分级研究[J]. 河北工业科技,2019,36(6):410-414.
[9]王风云,郑纪业,赵 佳,等. 基于机器视觉的双孢蘑菇分级算法[J]. 江苏农业科学,2018,46(13):193-197.
[10]马 聪,陈学东,周 慧. 基于图像处理技术的枸杞外形参数测量算法研究[J]. 宁夏农林科技,2020,61(8):60-63.
[11]戴建民,曹 铸,孔令华,等. 基于多特征模糊识别的烟叶品质分级算法[J]. 江苏农业科学,2020,48(20):241-247.
[12]谢洪起. 基于RGB-D相机的猕猴桃外形和体积检测方法研究[D]. 杨凌:西北农林科技大学,2018.
[13]杜 云,郑羽纶,张效玮. 基于图像处理的苹果大小分级研究[J]. 河北工业科技,2019,36(6):410-414.
[14]饶秀勤,岑益科,应义斌. 基于外形几何特征的鸡蛋重量检测模型[J]. 中国家禽,2007,29(5):18-20.
猜你喜欢
文苑(2020年6期)2020-06-22 08:41:34
中国医疗保险(2017年6期)2017-07-18 11:28:19
科教导刊(2016年25期)2016-11-15 17:53:37
中国卫生(2016年5期)2016-11-12 13:25:50
软件工程(2016年8期)2016-10-25 15:55:22
科技视界(2016年20期)2016-09-29 11:11:40
企业导报(2016年10期)2016-06-04 11:37:43
中国卫生(2015年10期)2015-11-10 03:14:22
中国卫生(2015年6期)2015-11-08 12:02:44
筑路机械与施工机械化(2014年2期)2014-03-01 02:57:37