
基于预估模糊PID的超声雾化器控制系统设计与研究
2021-12-08 13:32李继刚拓福婷岳庆玲陈玉
今日自动化 2021年9期
李继刚 拓福婷 岳庆玲 陈玉


[摘 要]超声雾化器在日益增多的呼吸道疾病的治疗中发挥着不可替代的作用,文章针对目前市场上的雾化器存在温度控制系统不完善的问题,设计了一种智能超声雾化器控制系统。考虑温度控制中存在滞后、参数不确定性、外界干扰、未建模动态等问题,选择Smith预估器及模糊自适应PID控制相结合的温度控制方法。对所设计的控制算法进行仿真试验,并将结果与PID控制及Smith-PID控制进行对比。结果表明,预估模糊PID控制具有良好适应能力及鲁棒性,有助于改善雾化器性能。
[关键词]超声波;雾化器;温度控制;模糊PID
[中图分类号]TP273 [文献标志码]A [文章编号]2095–6487(2021)09–000–04
[Abstract]Ultrasonic nebulizer plays an irreplaceable role in the treatment of increasing respiratory diseases. Aiming at the problem of imperfect temperature control system of nebulizers on the market, an intelligent ultrasonic nebulizer control system is designed. Considering the lag, parameter uncertainty, external interference, unmodeled dynamics and other issues in temperature control, a temperature control method combining Smith predictor and fuzzy adaptive PID control is selected. Perform a simulation experiment on the designed control algorithm, and compare the results with PID control and Smith-PID control. The results show that the predictive fuzzy PID control has good adaptability and robustness, which helps to improve the performance of the atomizer.
[Keywords]ultrasonic; atomizer; temperature control; fuzzy PID
隨着科学技术的进步,人们的物质生活极大丰富的同时,由于气候变暖、空气污染严重、传染性病毒等导致的呼吸道疾病越来越多地影响到了人们的生活品质。针对呼吸道疾病,超声雾化器可将药液化为能够通过呼吸的方式进入肺部的微小雾滴,具有操作简单、治疗效果显著、无痛等特点,已经成为一种不可替代的医疗器械[1]。
近年,国内外学者都对超声雾化器进行了深入研究,各大生产厂家也对产品进行了技术改进。目前大部分的研究及技术改进集中于雾化设备的改进。饶东升[2]等设计了一种静态网式超声雾化器,通过超声变幅杆延长换能器寿命,且不需要通过加热等手段来进行药液雾化;赵蕊[3]以单片机为核心,实现对内部功能的控制,检测并显示工作温度,设计并实现了基于蓝牙技术的无线传输的通信链路,增强设备的网络治疗功能。PARI公司的产品膜片的振荡频率为10万次/s,雾化质量很高。鱼跃公司生产医用超声雾化器,其结构比较简单,价格适中。以上现有及改进的雾化器大部分存在温度不可调或者不够智能等不足。因此,为使更多的患者减轻病痛,设计一种更为智能化的雾化器具有重大意义。
针对目前医用超声雾化器的缺点,为了方便老人和孩子的使用,本研究确立了研制一种新型智能医用超声雾化器,具有常用参数的记忆功能,增加了语音提示功能,能够加热并精确控制药液温度。目前,针对雾化器温度控制中滞后、参数不确定性、外界干扰、未建模动态等问题,本文尝试了多种新型控制策略。主要包括经典PID控制、Smith预估控制与PID控制结合的Smith-PID控制、模糊自适应PID 控制与Smith预估控制相结合的 Smith-fuzzyPID控制。
1 雾化器系统概述
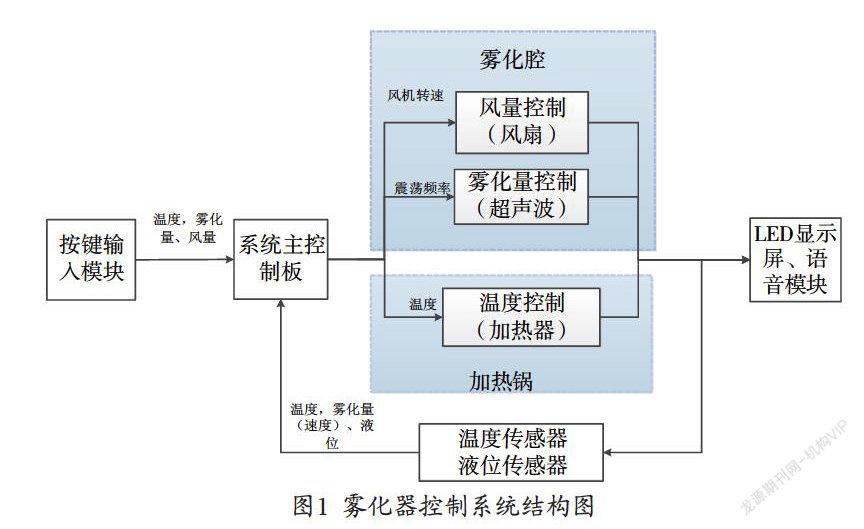
本文设计的雾化器主要由塑料壳体、加热锅、雾化腔、进水阀、出水阀、控制板等组成。该雾化器具有良好的人机交互功能,语音提示功能,能够控制加热药液的温度,通过超声波雾化给药。系统结构如图1所示。
在该控制系统中,按键输入模块中包括风量控制键(高、中、低三档),雾化量控制键(高、中、低)及药液温度控制键(设定值为40~80 ℃),系统允许温度误差为±1 ℃。系统主控制板的核心是PIC16F1938单片机,操作参数等数据存储于单片机内部EEPROM中。雾化腔中包括由PWM电路控制的PZT压电陶瓷换能器、PWM控制的送风风机及液位传感器:其中PZT压电陶瓷换能器将电能转换为高频振荡的超声波,从而控制雾化量,换能器的振荡频率决定了雾化程度,是雾化器性能的体现;送风风机用于控制进入呼吸管的雾化药液速度;液位传感器用于检测雾化腔中药液量。
加热锅中包括加热器及NTC温度传感器,其中加热器由主控制板控制,温度传感器用于检测及变送药液实际温度;LED显示屏显示药液当前的温度数值、指示灯指示风量等级、雾化量等级,语音播报模块核心为NV020C,播报雾化开始、即将结束及故障报警等。此外雾化腔和加热锅之间通过进水阀连接,系统通过检测雾化腔液位控制进水阀的通断。
整个系统的工作原理为:系统开始工作后温度传感器检测加热锅中药液温度变送至系统主控制板,与按键设定的温度进行比较,当药液温度低于给定值时主控板计算并输出相应的控制电流控制加热器工作,直至药液温度与给定温度一致;进水阀打开,给定温度的药液进入雾化腔;在给定雾化量、风量等级控制下,满足需求等级的雾化药液进入呼吸管。
本文中的加热器采用电阻炉加热,具有热效率高,无污染,操作简单等特点。通过机理分析法及查阅相关文献[4],可将被控对象简化为一个包含有滞后环节的一阶惯性环节:
式(1)中,K为电阻炉静态增益(参数K与药液质量m反比例相关);T为惯性时间常数;S为复变量;τ为纯滞后时间常数。根据一阶系统理论及科恩库恩公式,当m=0.3 kg,设定温度值为60°时,采用试验测定法得到系统参数:K=0.11、T=75、τ=8。
通过多次试验分析,该温度控制系统不仅存在滞后环节,还存在参数时变性,如药液质量m及设定温度值的变化会影响参数T、K;同时还存在加热锅是否加盖、环境温度变化等外部干扰因素。
2 控制器设计
由式(1)及机理分析可发现,该温度控制系统中存在滞后环节,参数时变,未建模动态。模糊控制器设计无需精确的系统数学模型,同时控制器具有抗干扰能力强,鲁棒性良好等特性[5],针对传统PID控制的参数适应性差的问题,本文采用模糊控制来调整PID控制器参数,解决系统中存在的问题,提高系统鲁棒性。
模糊PID控制中的模糊控制采用二维输入,7*7模糊规则的模糊控制器,由模糊化、模糊推理、解模糊三部分组成。模糊变量设计及隶属度函数选择:模糊控制器的输人信号为电流信号差E及EC,论域设置为[-6 6],输出变量KP、KI、KD,其模糊论域分别为[-10 10],将输入输出变量的模糊论域分别划分为7个子集{NB,NM,NS,Z,PS,PM,PB},根据三角形隶属度函数控制灵敏度高,分辨率高的特点[6],在控制器输出相对小的时候选用三角形隶属度函数。同时为了保证系统的稳态性能,控制器输出值较大时选用S和Z型隶属度函数,当其输出值适中时,选用梯形隶属度函数,由此得到输入变量及输出变量的隶属度函数。如图2所示。
模糊规则设计及解模糊:在本文所设计的模糊PID控制器中,模糊控制器用于调整PID控制器的参数。模糊规则根据以下思路建立:误差|e|较大,则PID控制中应选择较大的KP和KI,误差|e|适中时选适中的KP和KI,同理误差|e|较小时选相对较小的KP和KI;KD则随|ec|增大在小范围内减小,以此来进行较小系统超调,提高PID控制器的調节性能。根据上述思路,建立如表1所示的模糊控制规则。
针对控制系统中时滞问题,Smith预估控制在反馈控制的基础上引入补偿环节消除滞后环节,减少超调量和加速调节过程[7],提升系统性能。Smith预估补偿环节传递函数H(s)如式(4)所示,加入该环节后系统系统滞后环节e-τs被消除,系统稳定性增强。
3 仿真验证
根据系统工作原理及所设计控制器,可在Matlab平台中搭建系统仿真模型。如图3所示。将模糊自适应控制器、Smith预估器与传统PID控制器运用于雾化器温度控制中,并对各控制器在不同情况下的控制效果进行分析、对比。
为验证系统在设定温度变化时控制系统的性能,在第0 s将温度设定为0 ℃,在第200 s时设为40 ℃,在系统稳定后第600 s变更为60 ℃。其中PID控制器参数由Matlab中的PID Tuner整定得到:kp=51.11,ki=0.69,kd=202.01,N=0.43。仿真结果如图4所示。由图4可知,常规PID控制,超调5%,调整时间为120 s,稳态误差0.15%;增加Smith预估器后的PID控制几乎没有超调同时稳态误差减小,但系统调整时间仍然较大。本文所设计的Smith-fuzzyPID控制器,系统响应速度快,超调明显减小,调整时间减少50%,超调减少50%。故采用Smith-fuzzyPID控制方法使得被控系统的超调量、响应速度、调节时间等均优于常规控制方法。
为验证加入干扰量后即在药液保温过程中不加盖时控制系统的性能,在系统温度达到40 ℃后加入幅值为2,时间为10 s的干扰信号,系统仿真结果如图5所示。从图中可见,PID控制的超调量为4.5%,调整时间为60 s,稳态误差较大;Smith-PID超调减小2.7%,但系统调整时间及稳态误差没有明显变化;Smith-fuzzyPID控制器,超调变化不明显,但调整时间减少20%,稳态误差减少90%。
改变加热锅内药液质量,系统模型发生变化,仿真结果如图6所示。对比图4与图6可发现,系统模型发生变化时,Smith-fuzzyPID控制系统响应没有明显变化,模型变化几乎没有影响其控制性能。
4 结束语
通过以上仿真试验证明,基于Smith-fuzzyPID控制的雾化器加热锅温度调节系统对时滞、参数不确定性及未建模动态等问题适应性良好,系统超调量、响应速度、调节时间等方面均优于单纯的PID控制,在设定温度变化、药液质量变化、锅盖打开时,采用本文所设计的Smith-fuzzyPID控制器,雾化器温度控制系统跟随性、稳定性良好。该智能超声雾化器的研制将对医用超声雾化器的应用起到推动作用。
参考文献
[1] 杨志友.医用超声雾化器控制电路的设计[J].医疗装备,2020,33(23):9-11.
[2] 饶东升.基于嵌入式系统的超声波雾化器的设计与实现[D].合肥:合肥工业大学,2015.
[3] 赵蕊. 智能雾化器的设计与实现[D].武汉:武汉理工大学,2007.
[4] 吴勇,刘惠康,李辉.电阻炉温度智能控制系统的设计[J].电子设计工程,2013,21(2):50-52.
[5] 薛阳,张晓宇,江天博,等.基于视觉导航的巡检机器人双模控制研究[J].控制工程,2018,25(11):1982-1987.
[6] 张腾,张永根,轩德丰,等.基于PID及模糊PID的智能车恒速行驶仿真[J].现代机械,2021(1):91-94.
[7] 孙宇贞,高将,彭道刚.主汽温的改进型神经网络辨识Smith预估器[J].自动化仪表,2016,37(7):85-87,92.
猜你喜欢
中国典型病例大全(2022年7期)2022-04-22
电子乐园·上旬刊(2021年7期)2021-07-19
大自然探索(2021年11期)2021-01-05
小学阅读指南·低年级版(2020年10期)2020-10-12
小星星·阅读100分(高年级)(2019年3期)2019-04-19
小天使·六年级语数英综合(2018年10期)2018-10-15
建筑建材装饰(2016年13期)2017-01-04
建筑建材装饰(2016年9期)2016-12-29
军事文摘·科学少年(2016年7期)2016-09-20
科技视界(2016年15期)2016-06-30
